Стёепина курсПО ТУ
.DOCМинистерство образования и науки РФ
ОмГТУ Кафедра ИВТ
Курсовая работа по дисциплине
Основы Теории Управления
Выполнил:
Студент группы В-213
Леонов Степан
________________
Проверил
Доцент Юдин В.А.
Омск 2004
СОДЕРЖАНИЕ.
Содержание 2
Задание 3
Основная часть
Передаточная функция разомкнутой системы 4
Передаточная функция замкнутой системы 5
Передаточная функция ошибки 6
Дифференциальное уравнение замкнутой системы 7
Характеристическое уравнение замкнутой системы 8
Дифференциальное уравнение ошибки 9
Коэффициенты ошибки 10
Схема САУ для моделирования её на ПК 11
Коэффициенты системы 12
Интегральная оценка (расчеты, графики) 13-14
Задание.
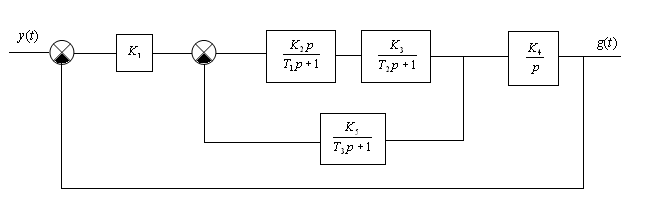
По заданной структурной схеме САУ найти:
-
Передаточную функцию разомкнутой системы.
-
Передаточную функцию замкнутой системы.
-
Передаточную функцию ошибки.
-
Записать дифференциальное уравнение замкнутой системы.
-
Записать характеристическое уравнение замкнутой системы.
-
Записать дифференциальное уравнение для ошибки.
-
Найти первые 2 коэффициента ошибки(C0,C1).
-
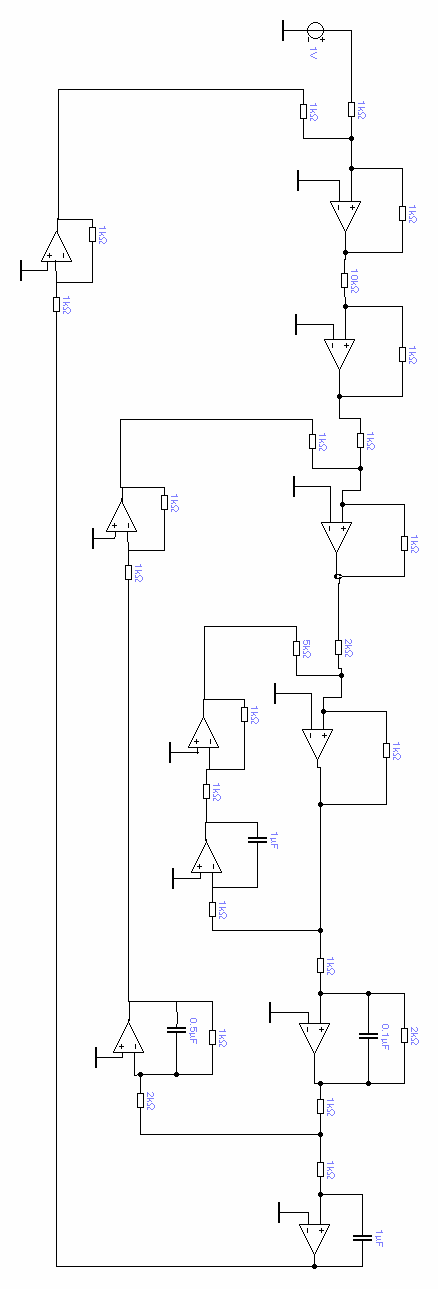
Пользуясь структурным методом моделирования составить схему для моделирования САУ на ПК и рассчитать коэффициенты модели.
-
Выбрать параметры корректирующих устройств, обеспечивающих минимум интегральной оценки и построить переходный процесс при выбранных параметрах.
Передаточная функция разомкнутой системы.

Т.к. все элементы расположены последовательно, то Wоб(p) будет выглядеть следующим образом:
![]()
Раскрыв скобки получим:
![]()
Передаточная функция замкнутой системы.
Известно, что![]() ,
, ,
,
тогда передаточная функция замкнутой системы будет иметь вид:
![]()
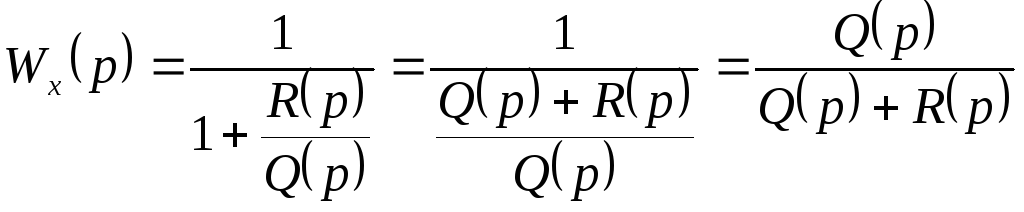
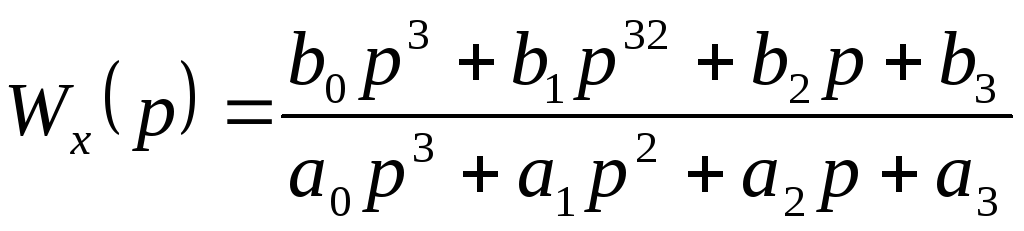
Передаточная функция ошибки.
Известно, что

Тогда передаточная функция ошибки будет иметь вид:
![]()
Зная, что
![]() ,
получим
,
получим
И тогда получаем:

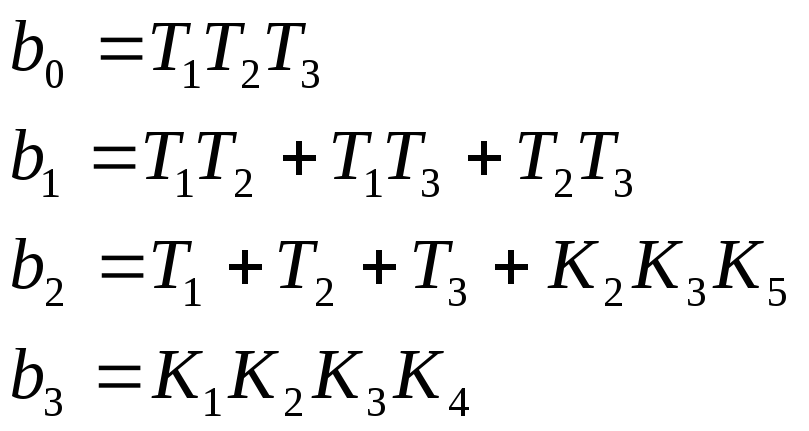
Дифференциальное уравнение замкнутой системы.
![]()
Тогда дифференциальное уравнение будет иметь вид

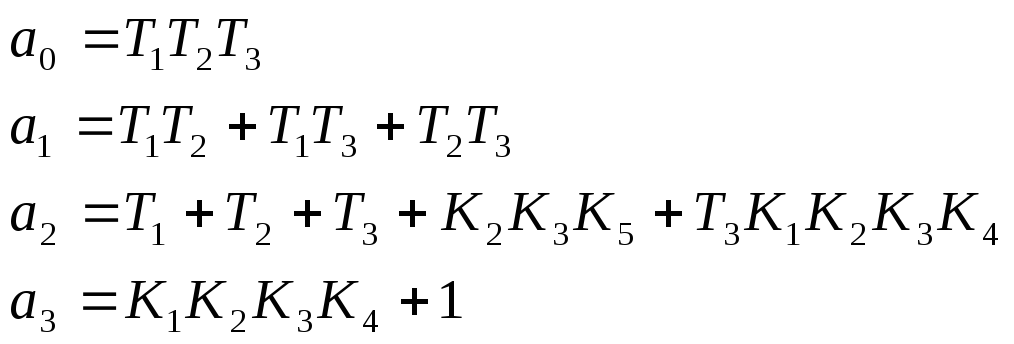
Характеристическое уравнение замкнутой системы.
Известно, что характеристическое уравнение любой замкнутой системы имеет общий вид R(p)+Q(p)=0, тогда для данной замкнутой системы характеристическое уравнение будет выглядеть следующим образом:
![]()
![]()
Дифференциальное уравнение ошибки.

В итоге получаем дифференциальное уравнение ошибки:

Коэффициенты ошибки.
Используя уравнение ошибки:

Разделим числитель на знаменатель(для упрощения процесса деления произведем замены:
 ,
,
где
Проведя деление получаем,
сопоставив с рядом
![]() ,
,
очевидно что
![]()
Схема САУ для моделирования её на ПК.
Коэффициенты.
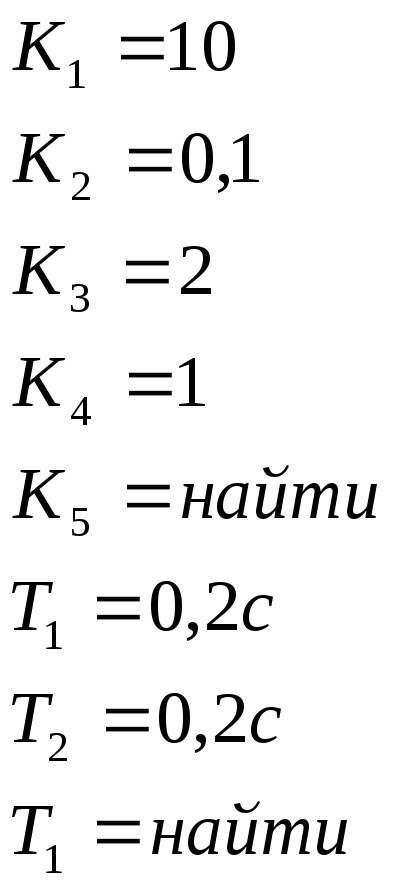
![]()
![]()
Параметры корректирующих устройств,
обеспечивающих минимум интегральной оценки.
Переходный процесс.

|
T3=0,01c |
|
|
|
|
k5 |
I |
|
1 |
0,001 |
0,099 |
|
2 |
0,01 |
0,099 |
|
3 |
0,5 |
0,102 |
|
4 |
1 |
0,11 |
|
5 |
1,5 |
0,117 |
|
6 |
2 |
0,12 |
|
7 |
2,5 |
0,15 |
|
8 |
10 |
0,41 |
|
9 |
20 |
0,8 |
|
10 |
40 |
1,52 |
|
|
|
|
|
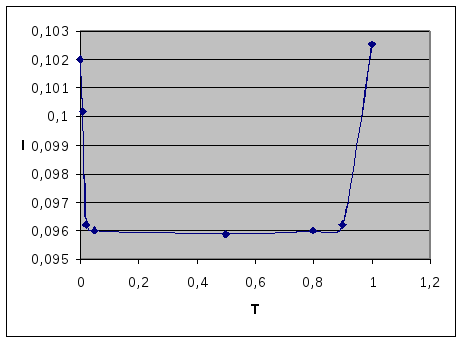
k5=0,5 |
|
|
|
|
T |
I |
|
1 |
0,000001 |
0,102 |
|
2 |
0,01 |
0,1002 |
|
3 |
0,02 |
0 |
|
4 |
0,05 |
0,096 |
|
5 |
0,5 |
0,095 |
|
6 |
0,8 |
0,096 |
|
7 |
0,9 |
0,0962 |
|
8 |
1 |
0,10255 |
|
9 |
100 |
0,0984 |
|
10 |
10000 |
0,099 |
|
11 |
1000000 |
0,102 |
 ,0962
,0962
Теперь, исходя из выше приведённых
графиков, примем
![]() и
и
![]() 0,5с.
0,5с.
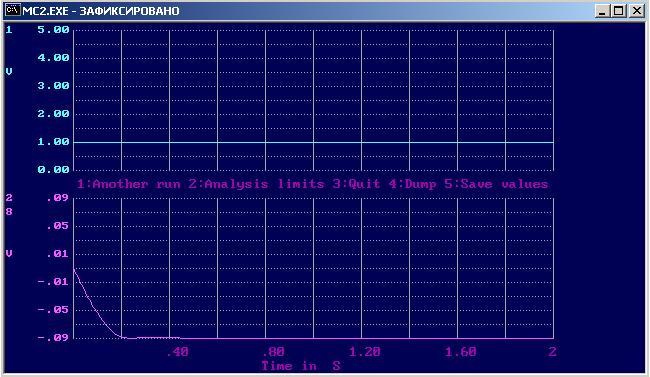
После установления в модели системы оптимальных параметров получен переходный процесс, изображённый на следующем графике:
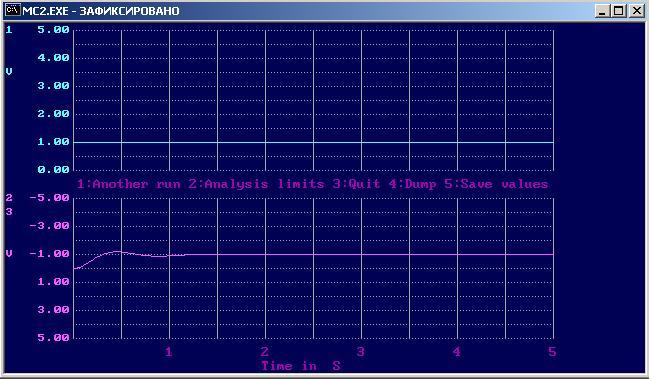
График интегральной оценки при этом выглядит так: