

Курсовой проект
.docМинистерство образования и науки Российской Федерации
ОМСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра ИВТ
КУРСОВОЙ ПРОЕКТ
по дисциплине «Основы теории управления»
Выполнил:
студент гр.
подпись, дата
Проверил:
доцент Юдин В. А.
подпись, дата
Омск 2005 г.
Задание
По заданной структурной схеме САУ (рис.1) найти:
-
Передаточную функцию разомкнутой системы W(p)
-
Передаточную функцию замкнутой системы Ф(p)
-
Передаточную функцию ошибки Wx(p)
-
Записать дифференциальное уравнение замкнутой системы
-
Записать характеристическое уравнение замкнутой системы
-
Записать дифференциальное уравнение для ошибки
-
Найти первые два коэффициента ошибки
-
Пользуясь структурным методом моделирования составить схему для моделирования САУ на ПК и рассчитать коэффициенты
-
В
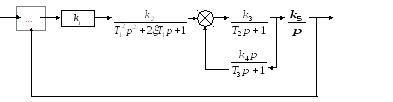
Рисунок 1 – Структурная схема САУ
ыбрать параметры корректирующего устройства обеспечивающий минимум интегральной оценки и построить переходный процесс при выбранных параметрах
Содержание
Задание 2
Содержание 3
Ход работы 4
1. Передаточная функция разомкнутой системы W(p) 4
2. Передаточная функция замкнутой системы Ф(p) 4
3. Передаточная функция ошибки Wx(p) 4
4. Дифференциальное уравнение замкнутой системы 5
5. Характеристическое уравнение замкнутой системы 5
6. Дифференциальное уравнение для ошибки 6
7. Первые два коэффициента ошибки 6
8. Схема для моделирования САУ на ПК и расчет коэффициентов моделей 6
8.1 Расчет коэффициентов пропорционального звена 7
8.2 Расчет коэффициентов колебательного звена 8
8.3 Расчет коэффициентов инерционного звена 9
8.4 Расчет коэффициентов реального дифференцируещего звена 10
8.5 Расчет коэффициентов идеального интегрирующего звена 10
9. Выбор параметров корректирующего устройства обеспечивающих минимум интегральной оценки 11
Ход работы
1. Передаточная функция разомкнутой системы W(p)

![]()
![]()
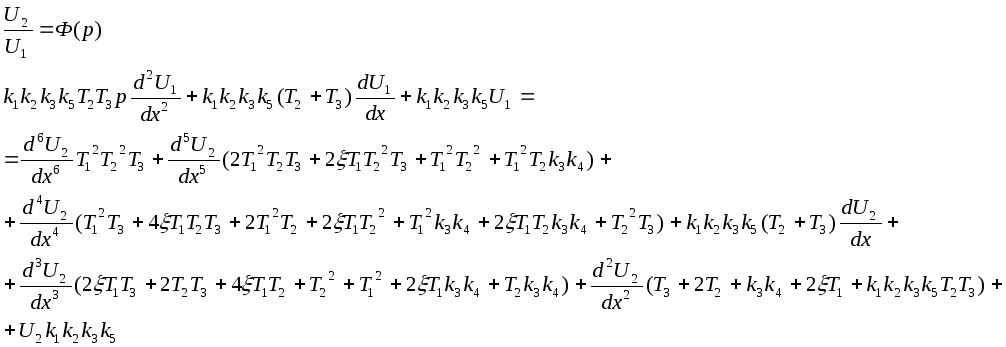
2. Передаточная функция замкнутой системы Ф(p)

![]()
![]()
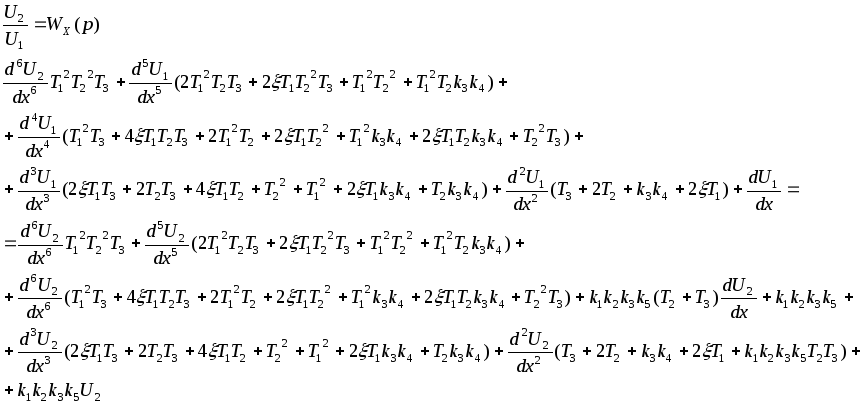
3. Передаточная функция ошибки Wx(p)



4. Дифференциальное уравнение замкнутой системы
5. Характеристическое уравнение замкнутой системы

6. Дифференциальное уравнение для ошибки
7. Первые два коэффициента ошибки
Разделив числитель передаточной функции ошибки на её знаменатель, определим коэффициенты:
![]() ;
;
![]()
8. Схема для моделирования САУ на ПК и расчет коэффициентов моделей
Схема модели САУ представлена на рис.2.
Рисунок
2 – Схема модели САУ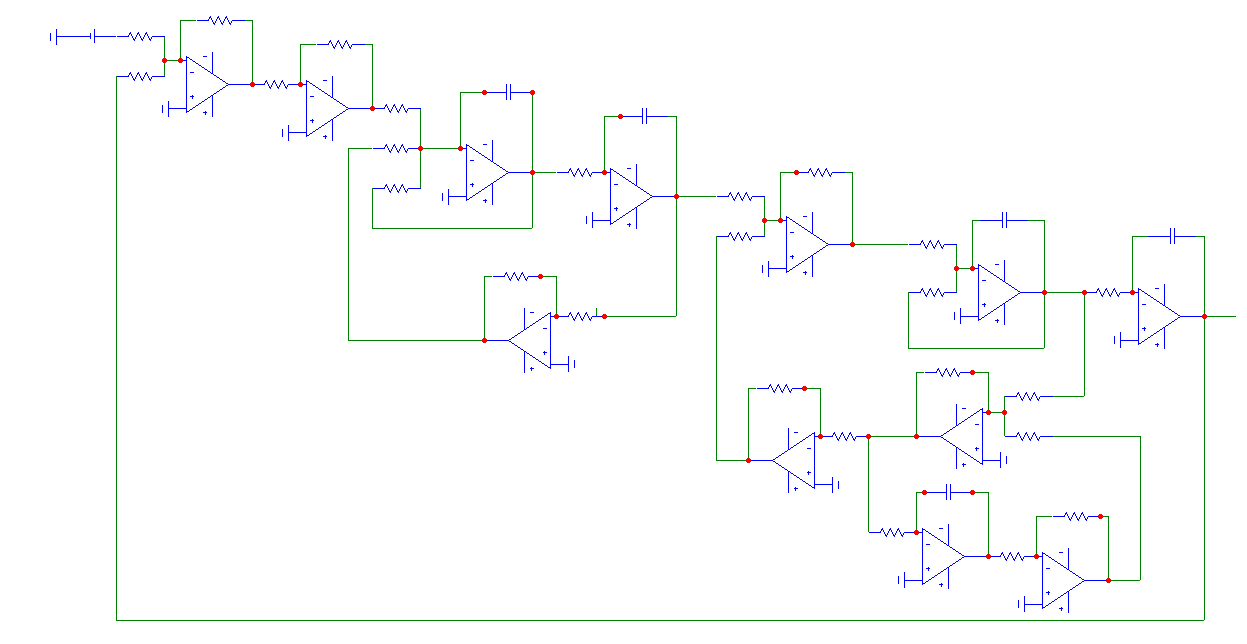
Для расчёта коэффициентов моделей были получены следующие коэффициенты структурной схемы:
- k1=2;
- k2=3;
- k3=2;
- k5=2;
- T1=0.12 c;
- T2=0.1 c;
- ξ=0.9;
Коэффициенты k4 и T3 было предложено выбрать из минимума интегральной оценки.
8.1 Расчет коэффициентов пропорционального звена
Модель пропорционального звена изображена на рисунке 3.
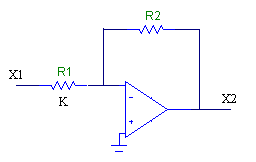
Рисунок 3 – модель пропорционального звена
Задаёмся значением R1 = 1МОм и из находим R2:
![]() ;
;
R2 = R1 ∙ k = 1МОм ∙ 2 = 2Мом
8.2 Расчет коэффициентов колебательного звена
Модель колебательного звена изображена на рисунке 4.
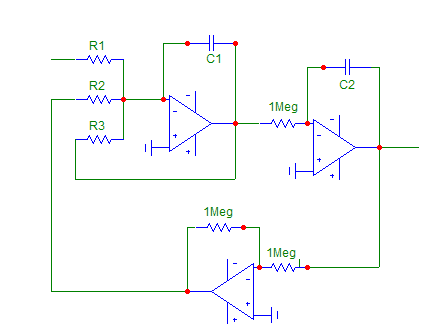
Рисунок 4 – модель колебательного звена
![]() ;
;
![]() ;
;
![]() ;
;
Задаёмся значением С1 = 1мкФ и находим R1, R2, R3:
![]() ;
;
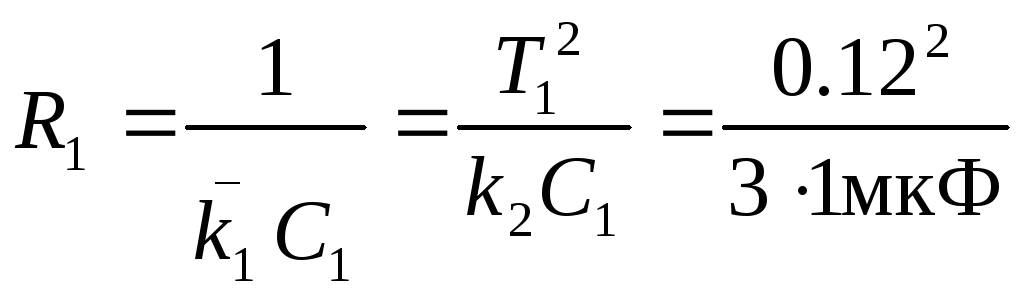 =0,0048МОм;
=0,0048МОм;
![]() ;
;
 =
0,07МОм;
=
0,07МОм;
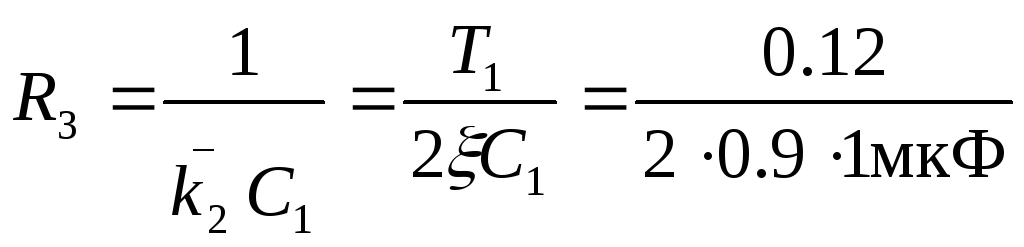
![]() ;
;
 =
0,12МОм;
=
0,12МОм;
8.3 Расчет коэффициентов инерционного звена
Преобразованная модель инерционного звена изображена на рисунке 5.
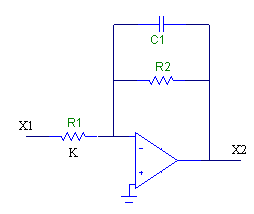
Рисунок 5 – преобразованная модель инерционного звена
![]() ;
;
Задаёмся значением R1 = 1МОм и находим R2:
R2 = R1k3 = 1MОм ∙ 2 = 2МОм;
T2= R2C1;
![]() .
.
8.4 Расчет коэффициентов реального дифференцируещего звена
Модель реального дифференцирующего звена изображена на рисунке 6.
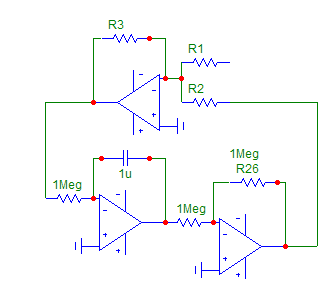

Рисунок 6 – модель реального дифференцирующего звена
![]() ;
;
![]() ;
;
Задаёмся значением R3 = 1МОм и находим R1 и R2:
![]() ;
;
 Мом;
Мом;
![]() ;
;
 R3
∙
R3
∙
![]() =
=
![]() 1Мом
1Мом
8.5 Расчет коэффициентов идеального интегрирующего звена
Модель идеального интегрирующего звена изображена на рисунке 7.
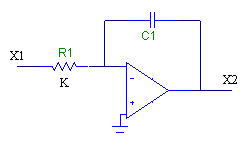
Рисунок 7 – модель реального интегрирующего звена
![]() ;
;
Задаёмся значением С1 = 1мкФ и находим R1:
![]() =0.5МОм.
=0.5МОм.
9. Выбор параметров корректирующего устройства обеспечивающих минимум интегральной оценки
Воспользуемся интегральной оценкой вида:
![]() dt.
dt.
Рассчитаем значения интеграла для
различных
![]() и
и
![]()
Таблица 1 –
зависимость интегральной оценки I
от
![]()
|
k4 |
R1 |
R2 |
I |
|
0,015 |
0,666667 |
0,01 |
0,786 |
|
0,02 |
0,5 |
0,01 |
0,724 |
|
0,025 |
0,4 |
0,01 |
0,666 |
|
0,03 |
0,333333 |
0,01 |
0,605 |
|
0,035 |
0,285714 |
0,01 |
0,562 |
|
0,04 |
0,25 |
0,01 |
0,507 |
|
0,045 |
0,222222 |
0,01 |
0,457 |
|
0,05 |
0,2 |
0,01 |
0,415 |
|
0,052 |
0,192308 |
0,01 |
0,393 |
|
0,054 |
0,185185 |
0,01 |
0,381 |
|
0,055 |
0,199929 |
0,01 |
0,407 |
Таблица 2 –
зависимость интегральной оценки I
от
![]()
|
T3 |
R1 |
R2 |
I |
|
0,008 |
0,148148 |
0,008 |
0,401 |
|
0,009 |
0,166667 |
0,009 |
0,382 |
|
0,01 |
0,185185 |
0,01 |
0,381 |
|
0,02 |
0,37037 |
0,02 |
0,396 |
|
0,03 |
0,555556 |
0,03 |
0,418 |
Из таблиц 1 и 2 видно, что минимум интегральной оценки обеспечивается при следующих параметрах: k4=0.054; T3=0.01. Построим переходный процесс САУ с выбранными коэффициентами.

Рисунок 8 – график переходного процесса САУ