

7. Как SimPowerSystems работает.
7.1 Алгоритм расчета SimPowerSystem-модели
После того как SimPowerSystem-модель построена, она может быть запущена на расчет так же как любая модель Simulink. Перед началом каждого расчета происходит инициализация модели. При инициализации вычисляется модель пространства состояний электрической схемы и строится эквивалентная модель, которая может рассчитываться в Simulink. Вызов функции power2sys начинает этот процесс (рис. 7.1).
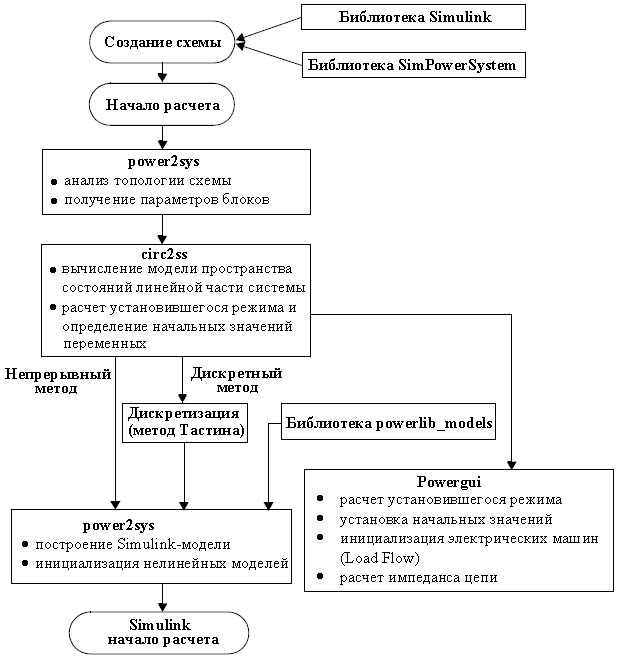 Рис.
7.1
Рис.
7.1
Функция power2sys выполняет при инициализации 4 этапа:
Сортировка SimPowerSystem-блоков, получение параметров блоков, определение топологии схемы и автоматическое присвоение номеров узлам схемы. При сортировке блоки разделяются на две группы: линейные и нелинейные.
Вычисление модели пространства состояний линейной части системы функцией circ2ss. На этом же этапе происходит расчет установившегося режима и определение начальных значений переменных.
Если задана дискретизация модели, то определяется дискретная модель схемы в пространстве состояний. При этом используется метод Тастина.
Строится Simulink-модель схемы и запоминается внутри одного из измерительных блоков. Это означает, что на схеме должен присутствовать хотя бы один измерительный блок (Current Measurement, Voltage Measurement, Three-Phase VI Measurement или Multimeter). Связь между эквивалентной Simulink-моделью и измерительными блоками осуществляется с помощью блоков Goto и From.
В эквивалентной Simulink-модели используется блок State-Space или блок S-function для моделирования линейной части системы. Для моделирования SimPowerSystem-блоков используются их прототипы из библиотеки powerlib_models. Для моделирования источников энергии используются блоки источников Soures библиотеки Simulink.
Блок Powergui, помещенный в модель позволяет задать начальные значения переменных модели, выполнить расчет установившегося режима, осуществить инициализацию схемы содержащей электрические машины и найти полное сопротивление (импеданс) цепи.
Связь нелинейных моделей с Simulink-моделью показана на рис. 7.2. Нелинейные модели включаются в цепи обратных связей линейной части Simulink-модели.
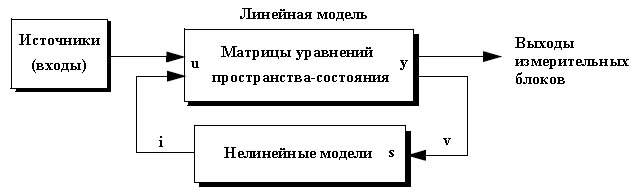 Рис.
7.2
Рис.
7.2
7.2 Выбор метода интегрирования
При расчете модели пользователь имеет возможность выбора метода интегрирования - непрерывного или дискретного, с переменным или фиксированным шагом. Для систем небольшого размера расчет непрерывным методом с переменным шагом дает, как правило, более точен. Алгоритм с переменным шагом также быстрее, поскольку число шагов оказывается меньшим, чем при расчете с фиксированным шагом и сопоставимой точностью. При расчетах устройств силовой электроники методы с переменным шагом дают большую точность, поскольку определяют прохождение через нуль токов полупроводниковых приборов с высокой точностью так, что не наблюдается разрывов сигналов. Однако для больших систем (систем имеющих большое число переменных состояния или нелинейных блоков) высокая точность непрерывных методов приводит замедлению расчета. При этом под большой системой понимается (условно) система, имеющая более 30 переменных состояния и более 6 ключей. В таких случаях выгодно провести дискретизацию модели.
Большинство из имеющихся в Simulink методов расчета с переменным шагом дает хорошие результаты при расчете линейных систем. Однако, схемы содержащие нелинейные элементы требуют методов решения для жестких систем. Самая высокая скорость расчета нелинейных систем достигается методами ode23tb или ode15s с параметрами заданными по умолчанию:
Solver (метод): ode23tb или ode15s,
Relative tolerance (относительная погрешность) = 1e-3,
Absolute tolerance (абсолютная погрешность) = auto,
Maximum step size (максимальный шаг) = auto,
Initial step size (минимальный шаг) = auto,
Initial step size (начальный шаг) = auto,
Maximum order (максимальный порядок для ode15s) = 5.
Обычно для абсолютной погрешности и максимального размера шага можно выбирать значение аuto. В некоторых случаях приходится ограничивать максимальный размер шага и абсолютную погрешность. Обычными рекомендациями при выборе максимального размера шага являются:
шаг не должен превышать величины 0.1 минимальной постоянной времени системы,
при наличии в схеме источников переменного напряжения или тока шаг расчета не должен превышать 0.01 - 0.02 периода источника с максимальной частотой.
Выбор абсолютной погрешности зависит от ожидаемых максимальных значений сигналов в схеме. Рекомендуемое соотношение здесь: 0.01-0.001 максимального значения сигнала. Например, если значения токов и напряжений схемы составляют тысячи ампер или вольт, то абсолютная погрешность может быть выбрана 0.1 или даже 1.0. Если же в схеме максимальные значения токов и напряжений лежат в пределах 10-100 ампер или вольт, то абсолютная погрешность должна быть выбрана на уровне 0.001-0.01.