

Лабораторная работа
Исследование емкостного преобразователя угла поворота и резистивного преобразователя.
Цель работы: ознакомится с работой преобразователя угла поворота, приобрести навыки градуировки, определить погрешность.
Программа работы
Выписать данные из справочника конденсатора, выданным преподавателем.
Определить полный угол поворота переменного конденсатора.
Разбить диапазон изменения угла φ на 10 равных частей.
С помощью измерительного прибора снять зависимость С=f(φ) и определить погрешность.
Полагая, что конденсатор находится в измерительном мосту, рассчитать изменения выходного сигнала моста для полученных значений, а также предложить схему компенсации реактивной составляющей для балансировки моста.
Полагая, что конденсатор включен в цепь ПОС генератора с L=1мГн,рассчитать предел изменения частоты и построить график f=f(φ).
ТЕОРЕТИЧЕСКАЯ ЧАСТЬ:
Ёмкостные преобразователи
Устройства, содержащие не менее двух поверхностей, между которыми действует электрическое поле, называются электростатическими (ЭС) преобразователями. Электрическое поле создается извне приложенным напряжением или возникает при действии на вход преобразователя измерительного сигнала.
Преобразователи, в которых электрическое поле создается приложенным напряжением, составляют группу емкостных преобразователей. Основным элементом в этих преобразователях является конденсатор переменной емкости, изменяемой входным измерительным сигналом.
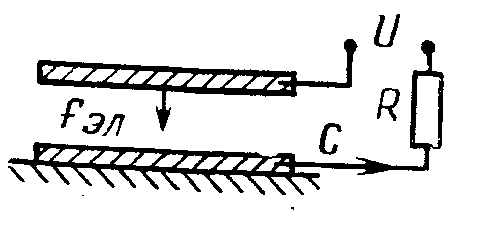
Рис. 1 Электростатический преобразователь
Датчик ёмкостной угла поворота. Вид общий.
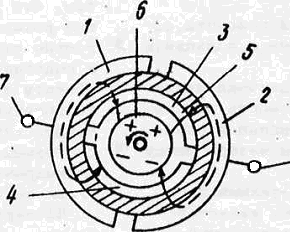
Рис 2. 1,2,3,4 - полуцилиндрические секторные пластины; 5 – сегнетоплёнка; 6 – цилиндрический ротор; 7 – электрические выводы.
Принцип действия.
В положении, указанном на чертеже (см. рис.2), линии электростатической индукции, исходящие из ротора 6, наводят на внутренней поверхности пластины 3 отрицательный заряд, а на внешней - положительный. Далее линии электростатической индукции проходят через сегнетопленку 5, расходятся по пластинам 1 и 2 и через пластину 4 возвращаются в ротор 6. Диэлектрическая проницаемость сегнетопленки 5 будет при этом минимальной, минимальной будет и емкость всего датчика между выводами 7. При повороте ротора 6 на 90° поток линий электростатической индукции сразу разводится и замыкается через пластины 3 и 4. Емкость датчика будет минимальной. Датчик может быть включен в любую измерительную схему - потенциометрическую, мостовую, генераторную и т.д.
Емкостные датчики можно разделить на две основные группы - датчики параметрические (недифференциальные) и датчики дифференциальные.
В схемах с параметрическими датчиками происходит преобразование входной неэлектрической величины (угла поворота оси ротора датчика) в электрическую выходную величину (частоту, ток, напряжение), функционально зависящую от входной величины.
В схемах с дифференциальными датчиками, включенными в следящие системы, с датчика снимается лишь сигнал рассогласования, который становится равным нулю в установившемся состоянии следящей системы.
Примером параметрического емкостного датчика может служить переменная емкость, включенная в контур лампового генератора (рис. 3) . Здесь при изменении угла поворота оси ротора изменяется емкость датчика и меняется частота генератора, являющаяся выходной величиной.
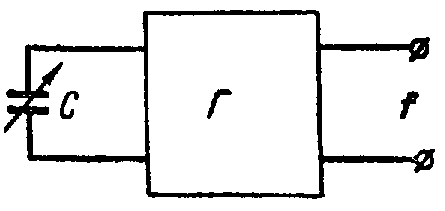
Рис. 3 Емкостной датчик, включенный в контур с генератором
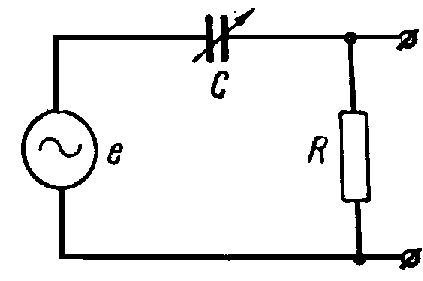
Рис 4. Емкостной датчик, включенный в цепь переменного тока
На
рис. 4 приведен другой пример использования
параметрического
датчика. В этом случае с изменением
значения
емкости С меняется ток через нее, а
следовательно, и напряжение на выходе
системы, падающее на сопротивлении
нагрузки R![]() ,
которое
и является выходной величиной.
,
которое
и является выходной величиной.
Подобные
системы являются разомкнутыми системами
регулирования. Основным недостатком
этих схем является зависимость
значения
выходной
величины от параметров источника
питания датчика, усилителя и других
элементов схемы, а также от внешних
условий. В самом Деле, стоит измениться
напряжению или частоте генератора,
питающего датчик (рис. 4), как напряжение,
частота и фаза, являющиеся выходными
величинами и снимаемые с сопротивления
R![]() ,
также изменятся.
,
также изменятся.
От этих недостатков свободны схемы с дифференциальными емкостными датчиками, включенными в замкнутую систему автоматического регулирования. В этих схемах выходной величиной является угол поворота оси отрабатывающего двигателя или другой оси, связанной с нею через редуктор. Одной из основных характеристик такой системы является чувствительность, показывающая, при каком минимальном отклонении чувствительного элемента система отработки приходит в действие. Внешние факторы - напряжение питания, температура окружающей среды и т. п. - влияют лишь на чувствительность системы; на точность системы они могут влиять лишь в той мерь, в какой она связана с чувствительностью.
Это значит, что схемы с емкостными дифференциальными датчиками, так же как и любые мостовые нулевые схемы с линейными относительно частоты и напряжения сопротивлениями в плечах, предъявляют значительно меньшие требования к стабильности источника питания.
ОБЛАСТЬ ПРИМЕНЕНИЯ
Конструктивные
схемы
емкостных преобразователей выполняются
различных вариантах в зависимости от
области применения
(Рис. 5)
При измерении уровней жидких и сыпучих
тел находят
применение
цилиндрические или плоские конденсаторы
(см.
Рис. 5,а), емкость
которых характеризуется уровнем х
и
зависит от диэлектрических проницаемостей
жидкости
![]() ,
изоляции
,
изоляции
![]() и воздуха
и воздуха
![]() .
.
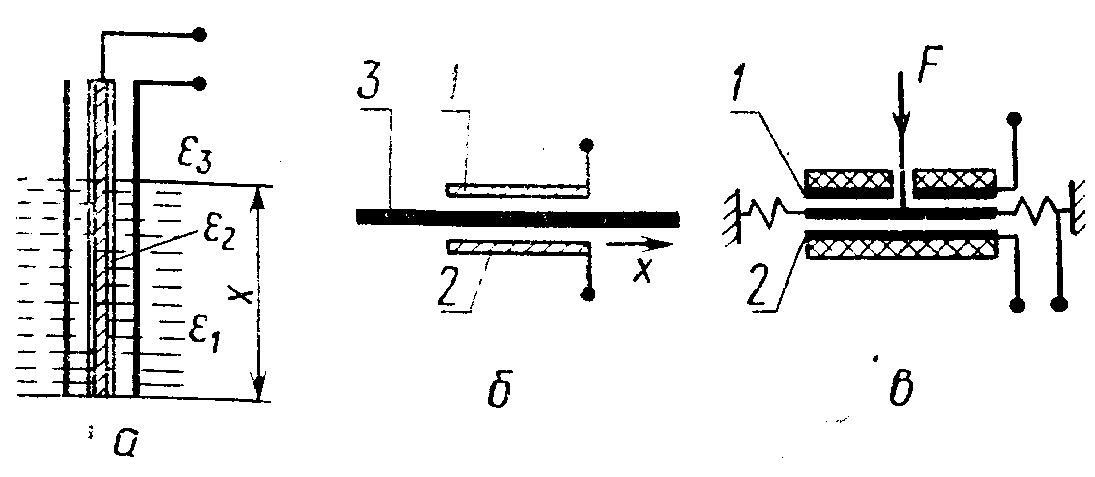
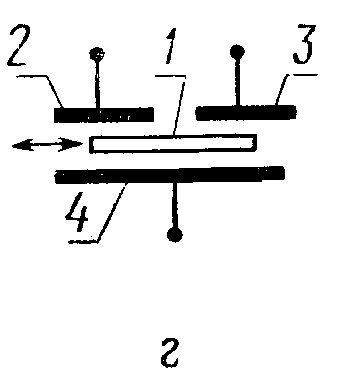
Рис. 5 Схемы устройства емкостных преобразователей
Для
измерения
толщины х
ленты
3 из диэлектрика с
![]() (см. Рис.
5, б)
ее протягивают между электродами 1 и 2,
расстояние межу которыми
(см. Рис.
5, б)
ее протягивают между электродами 1 и 2,
расстояние межу которыми
![]() .
Емкость конденсатора будет C=s/[(
-x)/
.
Емкость конденсатора будет C=s/[(
-x)/![]() +x/
,
где
-диэлектрическая
проницаемость воздуха.
+x/
,
где
-диэлектрическая
проницаемость воздуха.
Для измерения малых перемещений (до единиц микрометров), а также точного измерения быстроменяющихся сил и давлений применяются дифференциальные емкостные преобразователи с переменным зазором (Рис. 5,в). Средний электрод конденсатора укреплен на упругом элементе (мембране, упругой пластинке, растяжках) между неподвижными электродами 1 и 2.
Рассматриваемая схема может быть использована в приборах уравновешивания. Для этого усиленный сигнал с конденсатора после фазочувствительного детектирования может быть подан на обкладки 1 и 2, вследствие чего на средний электрод будет действовать электростатическая сила, уравновешивающая измеряемую силу. На Рис. 5, г и д показаны схемы устройства емкостных преобразователей с переменной площадью. В схеме на Рис. 5, г диэлектрик 1 перемещается по стрелке, а в схеме на Рис. 5, д один из электродов 2 жестко связан с валом и совершает угловые перемещения относительно неподвижного электрода 1.
Возможные области применения датчиков (в том числе и емкостных) чрезвычайно разнообразны, можно выделить лишь отдельные сферы:
промышленная техника измерения и регулирования,
робототехника,
автомобилестроение,
бытовая техника,
медицинская техника.
Применимость того или иного датчика в этих сферах определяется прежде всего отношением цена/эффективность. При промышленном применении определяющим фактором является погрешность, которая при регулировании процессов должна составлять 1...2%, а для задач контроля - 2...3%. В этих случаях цены датчиков превышают 100 немецких марок ФРГ. Для специальных применений в области робототехники и медицинской техники цены датчиков могут достигать даже уровня 10...100 тыс. немецких марок ФРГ. Благодаря внедрению новых технологий изготовления (высоковакуумное напыление, распыление, химическое осаждение из газовой фазы, фотолитография и т. д.) и новых материалов непрерывно расширяются сферы применения датчиков, недоступные ранее из-за их высокой цены.
ПОРЯДОК ПОДГОТОВКИ И ПРОВЕДЕНИЯ ЭКСПЕРИМЕНТА.
ОБРАБОТКА РЕЗУЛЬТАТОВ.
Определить у конденсатора, выданного преподавателем полный угол поворота.
Подключить к конденсатору измерительное устройство. Построить снятую зависимость С=f(φ).
Определим
погрешность δ=![]() .
.
Рассчитать изменение выходного сигнала при включении конденсатора в измерительный мост. При баланса моста Uвых=0, f=100мГц,С1=Сmin,R1=R2=1кОм.

Определить выходное напряжение по закону Кирхгофа
Uвых=I1*R2-I2*Xmin
Xcnmax=![]()
Xcnmin=![]()
Найдём I1,I2 при Uвх=5в
I1=![]() ;
I2=
;
I2=![]()
Схема для компенсации резистивной составляющей
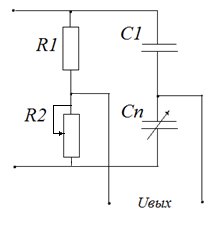 Uвых=I1*R2-I1*Xmax
Uвых=I1*R2-I1*Xmax
Рассчитать предел изменения частоты полагая, что емкость включена в ПОС генератора с L=1мГн и построить зависимость f=f(φ)
![]()
Сделать выводы по проделанной работе.
2)Цель работы: ознакомиться с работой резистивных датчиков угла поворота, приобрести навыки их градуировки, определить чувствительность резисторных датчиков.
Программа работы:
Ознакомиться с методикой градуировки датчиков
Для выданных преподавателем резистивных датчиков выписать справочные данные.
Разбить диапазон перемещения на 10 частей в зависимости от вида датчика и снять зависимость R=f(L).
Построить зависимость R=f(L)
Определить зависимость входного напряжения от перемещения L.
а) Для потенциометрического включения резистивного преобразователя.
б) Для реостатного включения резистивного преобразователя.
6. Сравнить с теоретическими графиками.
7. Сделать выводы
ТЕОРЕТИЧЕСКАЯ ЧАСТЬ:
Переменный резистор— электрический аппарат, служащий для регулировки и получения требуемой величины сопротивления. Как правило, состоит из проводящего элемента с устройством регулирования электрического сопротивления. Изменение сопротивления может осуществляться как плавно, так и ступенчато.
Изменением сопротивления цепи, в которую включен реостат, возможно достичь изменения величины тока или напряжения. При необходимости изменения тока или напряжения в небольших пределах реостат включают в цепь последовательно. Для получения значений тока и напряжения от нуля до максимального значения применяется потенциометрическое включение реостата, являющего в данном случае регулируемым делителем напряжения.
Резистивные датчики угла поворота- принципе, любой переменный резистор является таким датчиком по определению. Нормируется только функция угла, линейная или экспоненциальная. Кроме того, существуют
прецизионные резистивные датчики угла поворота с разрешением лучше угловой минуты.

Датчики перемещения реостатного типа представляют собой регулируемые омические сопротивления специальных исполнений. В отличие от обычных регулировочных реостатов к датчикам предъявляется требование — наличие определенной, однозначной зависимости между величиной сопротивления и перемещением.
Сопротивление проводника можно определить по следующей формуле:
R=ρl/S (1)
где ρ – удельное сопротивление материала проводника;
l – длина проводника;
S – площадь поперечного сечения проводника.
Из формулы (1) следует, что для изменения сопротивления надо изменить площадь или длину проводника. Легче всего изменять длину. Простейшим способом изменения сопротивления резистора за счет изменения длины проводника, является, перемещение отвода (скользящего контакта). Реостатные датчики (потенциометры) выполняются с продольным или круговым перемещением. При приложении к ползунку усилия или крутящего момента его продольное или угловое перемещение преобразуется в изменение сопротивления и далее в изменение снимаемого с реостата напряжения или протекающего тока. Так как длина проводника стоит в числителе, то зависимость сопротивления будет подчиняться линейному закону. Выходная величина, напряжение на резисторе, тоже будет изменяться линейно.
Часто применяют измерительные потенциометры, изменение сопротивления которых связано нелинейной зависимостью с перемещением ползунка. Эти функциональные потенциометры могут иметь квадратичную, синусоидальную или другую, отвечающую специальным требованиям, характеристику.
Для обеспечения минимальной обратной реакции необходимые для перемещения ползунка силы или моменты должны быть минимальны, что успешно достигается в прецизионных потенциометрах. Существуют конструкции реостатных датчиков, в которых момент, необходимый для перемещения ползунка, равен 4 мН-см, что позволяет в большинстве случаев пренебречь обратной реакцией.
Большое значение имеет разрешающая способность чувствительного элемента, определяемая изменением сопротивления между двумя соседними витками обмотки.

а) реостатный датчик линейных перемещений;
б) реостатный датчик угловых перемещений.
Погрешность реостатных датчиков определяются:
-ступенчатостью изменения сопротивления;
-изменением сопротивления от температуры;
-изменением свойств материала; это явление заметно в полупроводниковых датчиках, где погрешность может достигать 1—2%;
-отклонением фактической характеристики от расчетной. Нелинейность характеристики лежит в пределах 0,1—3%. При специальной намотке она может быть снижена до 0,01%.
В датчиках с ртутным контактом имеет место дополнительная погрешность 0,5—1% за счет явления поверхностного натяжения.
Преимуществами реостатных датчиков является: простота конструкции, дешевизна, большая чувствительность и выходная мощность, малые погрешности нелинейности; высокое разрешение; применимость в вычислительных устройствах.
На характеристику преобразования Y(X) реального датчика могут влиять различные внешние факторы (напряжение питания измерительной цепи, подключение нагрузки, изменение температуры окружающей среды и т.д.). В результате реальная характеристика Y(X) отличается от характеристики преобразования, соответствующей номинальным режимам работы датчика, и которую можно рассматривать как некоторую идеальную характеристику преобразования. Отклонение реальной характеристики преобразования от
идеальной представляет собой погрешность преобразования (измерения).
Различают абсолютную погрешность (ΔY), выражаемую в единицах выходной величины Y, и относительную погрешность (δ), которую обычно определяют как отношение абсолютной погрешности к разности предельных значений выходной величины и
выражают в долях единицы или в процентах:

где Y - фактическое значение выходной величины датчика, соответствующее реальной характеристике преобразования; Yн - значение выходной величины, определяемое по идеальной характеристике преобразования при том же значении X; Yмакс и Yмин - максимальное и минимальное значения выходного сигнала датчика (измерительной цепи).
Недостатки:
небольшой срок службы и малая надежность, связанные с истиранием скользящего контакта, значительное измерительное усилие.
Характеристики реостатных датчиков
-входная величина: линейное или угловое перемещение.
-выходная величина: изменение сопротивления.
-диапазон измерения: линейный до 60 мм, угловой до 355°;
-погрешность от нелинейности характеристики; 0,1—0,3 %.
-динамические характеристики (частотный диапазон): зависят от параметров механических преобразователей, включенных перед потенциометром; при линейных и угловых измерениях до 5 и до 1000 Гц соответственно.
Переменные резисторы характеризуются следующими основными параметрами. Номинальное значение сопротивления Rном. Измеряется в омах (Ом), килоомах (кОм), мегаомах (мОм). Номинальные значения сопротивлений указывают на корпусе изделия. Допустимое отклонение действительного сопротивления от его номинального значения. Это отклонение измеряется в процентах, оно нормировано и определяется классом точности. Номинальное значение мощности рассеивания переменного резистора Rном. Этот параметр измеряется в ваттах (Вт). Это наибольшая мощность постоянного или переменного тока, при протекании которого через переменный резистор он может работать длительное время без повреждений. Мощность Рном, ток I, протекающий через резистор, падение напряжения U на резисторе и его сопротивление r связаны зависимостью: P=UI U=IRВ большинстве устройств радиоэлектронной аппаратуры применяют переменные резисторы с номинальной мощностью рассеивания от 0,05 до 2 Вт. Температурный коэффициент сопротивления (ТКС) резистора. Характеризует относительное изменение сопротивления переменного резистора при изменении температуры окружающей среды на 1 °С и выражается в процентах. В резисторах ТКС незначительный и составляет в среднем десятые доли - единицы процента. Собственные индуктивность и емкость. Определяются габаритными размерами, конструкцией и влияют на частотный диапазон применения резисторов.
Функциональные и конструктивные особенности. Таких характеристик несколько. Перечислим их. Функциональная зависимость (кривая регулирования). Кривая, которая показывает зависимость величины сопротивления между подвижным контактом и одним из неподвижных контактов проводящего элемента от угла поворота. По характеру функциональной зависимости переменные резисторы разделяются на линейные и нелинейные. Характер нелинейной зависимости определяется схемными задачами, для решения которых предназначен резистор. Наиболее распространенные нелинейные зависимости — логарифмические и обратно-логарифмические. Разрешающая способность. Важная характеристика переменных резисторов, показывающая, какое наименьшее изменение угла поворота подвижной системы резистора может быть различимо. Ее характеризуют минимально допустимым изменением сопротивления при весьма малом перемещении подвижного контакта. У непроволочных резисторов разрешающая способность теоретически неограниченна и лимитируется дефектами и неоднородностями проводящего слоя, контактной щетки и величиной переходного контактного сопротивления. Шумы вращения. При вращении подвижной системы резистора, помимо тепловых и токовых шумов на выходное напряжение, зависящее от угла поворота, накладывается еще одна составляющая — напряжение шумов вращения. Их уровень значительно превышает тепловые и токовые шумы в резисторе и достигает 30 –40 дБ. Шумы вращения особенно характерны для непроволочных потенциометров. Источниками шумов вращения могут быть: шумы переходного сопротивления, возникающие в результате появления контактной разности потенциалов между щеткой и резистивным элементом; термоэлектродвижущая сила, возникающая от нагрева проводящего элемента при быстром вращении подвижной системы.
Элементы сопротивления:
а) Проволока как элемент сопротивления - это очень традиционное исполнение. В зависимости от значения общего сопротивления используются различные металлические легирующие элементы.
Преимущества проволоки как элемента сопротивления: возможны малые допуски на линейность, на сопротивление и на температурный коэффициент. Сопротивления общего назначения могут изготавливаться малыми сериями. Прекрасные электрические данные, низкие затраты на изготовление, высокая гибкость. Недостатками являются низкая разрешающая способность из-за перехода с витка на виток, относительно невысокий срок эксплуатации из-за стирания, высокий электрический уровень шума связанный с износом, малая пригодность при ударных и вибрационных нагрузках и высокой скорости перестановки.
б) Элементы сопротивления гибридной техники
Эта техника предлагается на рынке лишь немногими изготовителями. Она представлена промежуточным решением между проволокой и проводящими искусственными материалами как элементами сопротивления. Витки проволоки заполняются в специальном процессе в толстослойной массе и весь элемент покрывается этой пастой.
в) Проводящие искусственные материалы как элементы сопротивления
Эта современная технология используется прежде всего в современных одновитковых переменных резисторах, и при этом может быть достигнут очень высокий срок эксплуатации.
Преимущества этой техники: очень высокий срок эксплуатации, практически бесконечная разрешающая способность, высокая устойчивость к ударным и вибрационным нагрузкам, высокое число оборотов. Малые допуски при этом трудно реализовать, отсюда дороговизна. Плохой температурный коэффициент, пригодны только для потенциометров с <360° углом поворота.
Механический угол поворота
Очень часто и особенно рукой тяжело установить точное желаемое значение, так как это требует точного позиционирования оси переменного резистора, соединенной с ползунком на высокоразрешающем элементе сопротивления. Поэтому различают:
а) Многооборотный переменный резистор. Примером таких резисторов являются СП5-35.
Много лет уже широко известен прецизионный резистор на 10 механических оборотов, то есть с механическим углом поворота до 360°. Исполнение в проволочной гибридной технике может быть приобретено за очень низкую цену. Из-за очень больших количеств таких переменных резисторов выпускаемых в мире они используются как точные регулировщики напряжения на передних платах измерительных, управляющих и регулирующих приборов. Чем больше механический угол поворота, и тем самым механическое число поворотов, тем выше точность установки.
б) Переменный резистор с одним механическим оборотом (угол поворота 360°)
Этот вид часто используется как аналоговый датчик угла поворота. Для многих применений вполне достаточно одного поворота для всего интервала сопротивления, особенно если весь интервал сопротивления должен быстро выставляться.
Механические виды - наиболее часто используемыми видами являются:
а) Крепления в одной точке
Такие крепления часто используются в сочетании с регуляторами ручного управления или при малых скоростях установки. Прецизионные резисторы с одноточечным креплением почти всегда оснащены прецизионным подшипником скольжения в нарезной втулке . Поэтому оно рекомендуется только для медленной скорости установки без радиальных и аксиальных нагрузок на ось резистора. Эти переменные резисторы экономически более выгодны, чем соответствующие им с сервофланцем или с шарикоподшипником.
б) Прецизионный резистор с синхрофланцем (сервофланцем либо шарикоподшипником)
Такие подшипники используются чаще всего в сочетании с моторами и другими элементами привода. Подшипником почти всегда является прецизионный шарикоподшипник, который выдерживает намного более высокое число оборотов, как и более высокие аксиальные и радиальные нагрузки. При этом монтаж происходит либо с тремя нарезными отверстиями в фланце, либо с тремя, так называемыми, синхронизационными скобами. Такое строение используется в первую очередь для применения потенциометра как аналогового датчика угла.
Ход работы и обработка результатов:
Собираем установку: подключаем переменный резистор к источнику питания устанавливая входное напряжение равным 5В. Разбиваем диапазон перемещения на 10 частей, в зависимости от вида преобразователя. Для линейных резисторов делим его диапазон перемещения на отрезки см., для датчиков угла поворота делим полный угол поворота на °, и снимаем зависимость R(L).Для определения сопротивления использовать вольтметр в режиме измерения сопротивления.
-
n/
 °
°R(Ком)
L(мм)
1/0°
2/36°
-/-
10/360°