

2 Кінематичне дослідження механізму методом кінематичних діаграм………………….……………….…………….5
2.1 Побудова плану положень механізму …………………….……….....5
2.2 Побудова графіка переміщень вихідної ланки …………..…………..5
2.3 Побудова графіка швидкостей та прискорень……………………….
вихідної ланки механізму ……………………………………………..….7
3 ДОСЛІДЖЕННЯ МЕХАНІЗМУ МЕТОДОМ ПЛАНІВ ШВИДКОСТЕЙ ТА ПРИСКОРЕНЬ……………………………………………………………..8
3.1 Побудова планів швидкостей вихідної ланки ………………... ..…...7
3.2 Побудова планів прискорень вихідної ланки ………………………..9
3.3 Визначення похибки розрахунків ………………………………......11
ВИСНОВКИ.…………………………………………………………………14
ПЕРЕЛІК ПОСИЛАНЬ…….………………………………………………..15
1 Структурний аналіз механізму
Мета проведення структурного аналізу механізму – визначення ступеня рухомості й класу механізму.

Рисунок 1.1
Приймаємо такі умовні позначення ланок:
0 – стояк;
1 – кривошип АВ;
2 – шатун BD;
3 – повзун С;
Кількість рухомих ланок механізму дорівнює n=3. Ланки механізму
утворюють кінематичні пари 5го класу. Кількість кінематичних пар п’ятого класу дорівнює p5=4(Рисунок 1.1).
Дані про кінематичні пари наведено у таблиці 1.1.
Кінематичні пари Таблиця 1.1
Позначення кінематичної пари |
Номери ланок кінематичних пар |
Клас кінематичної пари |
A |
0 – 1 |
5 |
B |
1 – 2 |
5 |
С2 |
2 – 3 |
5 |
С3 |
3 – 0 |
5 |
За формулою Чебишева визначаємо ступінь вільності механізму
![]() (1.1)
(1.1)
де n – кількість рухомих ланок;
 p5
-
кількість кінематичних пар 5го
класу;
p5
-
кількість кінематичних пар 5го
класу;
p4 - кількість кінематичних пар 4го класу;
![]()
Це означає що в даному механізмі має бути одна початкова ланка.
За початкову ланку згідно умови завдання приймаємо кривошип 1 (ланку АВ), рух якої заданий.
Розкладаємо механізм на структурні групи (групи Ассура).
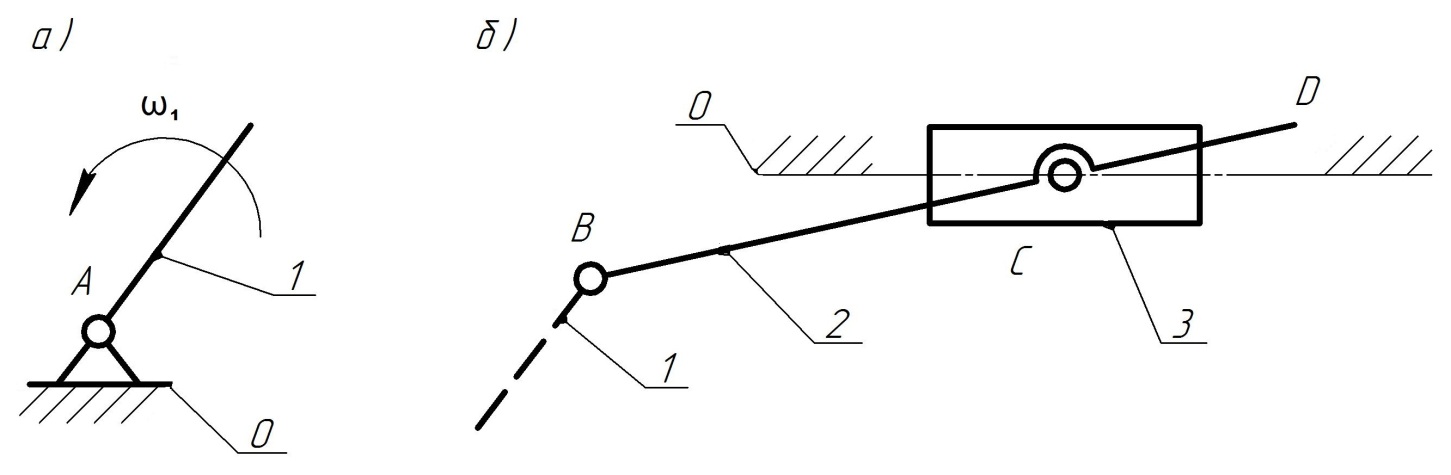
Рисунок 1.2
Відокремлюємо кривошип АВ разом зі стояком О він утворює механізм І класу, І порядку (Рисунок 1.2а).
Відокремлюємо ланцюг, який складається з двох ланок 3, 2 і трьох кінематичних пар (С2, С3, В), вони утворюють групу ІІ класу, ІІ порядку, ІІ виду (Рисунок 1.2б).
У цілому механізм є механізмом ІІ класу. Формула будови механізму має вигляд
І(1)→ ІІ(2,3)

2 Кінематичне дослідження механізма методом
КІНЕМАТИЧНИХ ДІАГРАМ
2.1 Побудова плану положень механізму
Кінематичну схему механізму виконуємо в масштабі довжин (Додаток А):
![]() (2.1)
(2.1)
де lАВ –дійсна довжина кривошипа АВ ,(за умовою завдання, м);
АВ – довжина відрізка АВ в мм, яка зображена на плані механізму
Приймаємо довжину кривошипа АВ =50 мм (Вибір довільний).
![]() ;
;
Знайдемо довжину шатуна BC на плані, виходячи з формули (2.1)
 ;
;
lВС – дійсна довжина кривошипу ВC, м,
µl – масштаб довжин, м/мм ;
![]() ;
;
Знайдемо довжину відрізка CD на плані, виходячи з формули (2.1):
 ;
;
lСD – дійсна довжина відрізка CD, м,
µl – масштаб довжин, м/мм ;
![]() ;
;
Знайдемо відстань а на плані, виходячи з формули (2.1):
 ;
;
lа – дійсна довжина відрізка a, м,
µl – масштаб довжин, м/мм ;
 ;
;
Побудову кінематичної схеми починаємо з нерухомої ланки в точці А (Додаток А). Проводимо траєкторію по якій рухається точка В, радіусом п’ятдесят міліметрів.
Відзначаємо відстань а, яка дорівнює десять міліметрів, і проводимо горизонтальну лінію, що є напрямком руху повзуна С.
 Визначаємо
крайнє («мертве») положення вихідної
ланки – повзуна (3), де швидкість його
дорівнює нулю. Повзун С займає
крайнє положення («мертве») коли кривошип
АВ і шатун ВD
витягуються у одну рівну лінію.
Визначаємо
крайнє («мертве») положення вихідної
ланки – повзуна (3), де швидкість його
дорівнює нулю. Повзун С займає
крайнє положення («мертве») коли кривошип
АВ і шатун ВD
витягуються у одну рівну лінію.
З цього положення механізму траєкторію руху точки В розбиваємо на дванадцять рівних частин, і методом засічoк будуємо дванадцять положень механізму.
Положення точки В позначимо В0 , В1 ….. В11 відповідно у напрямку обертання кривошипа. Положення точок С0 С1 ….. С11, визначимо засічками відповідної довжини ВС (160мм), та СD(довжини 50мм).