

Датчики частоты вращения и положения коленчатого и распределительного валов
Датчик частоты вращения и положения коленчатого вала.
Положение поршня в цилиндре является определяющим для расчета момента зажигания. Датчик на коленчатом валу выдает информацию о положении поршней всех цилиндров. Частота вращения коленчатого вала также рассчитывается по сигналу этого датчика. На коленчатом вале устанавливается магнитопроводящий зубчатый диск с расчетным числом зубьев 60, при этом 2 из них отсутствуют. Индуктивный датчик частоты вращения производит последовательный опрос этих 58 зубьев. Он состоит из постоянных магнитов и сердечника из мягкого железа с медной обмоткой (рис. 6.40, где: 1 - постоянный магнит; 2- корпус; 3 - картер двигателя; 4 - сердечник; 5- обмотка; 6 - зубчатый диск с опорной меткой(промежуток между зубьями)). Провод, соединяющий датчик и БУ, выполняется экранированным. При прохождении зубьев через зону чувствительного элемента в нем изменяется магнитный поток.
В обмотке датчика индуцируется переменная ЭДС. На рис. 6.41 изображена Синхронизация сигналов зажигания; положения коленчатого и распределительного валов: а - вторичное напряжение катушки зажигания; б- сигнал индукционного датчика положения коленчатого вала; в - сигнал датчика Холла положения распределительного вала; 1 - замкнутое состояние; 2- зажигание. Амплитуда переменного напряжения уменьшается при увеличении расстояния между датчиком и зубчатым диском и растет с увеличением частоты вращения. Достаточная амплитуда имеет место уже при минимальной частоте вращения (20 мин"1). Геометрия зубьев и полюсов должны соответствовать друг другу. Блок управления формирует из синусоидального напряжения с сильно меняющейся амплитудой прямоугольное напряжение с постоянной амплитудой.
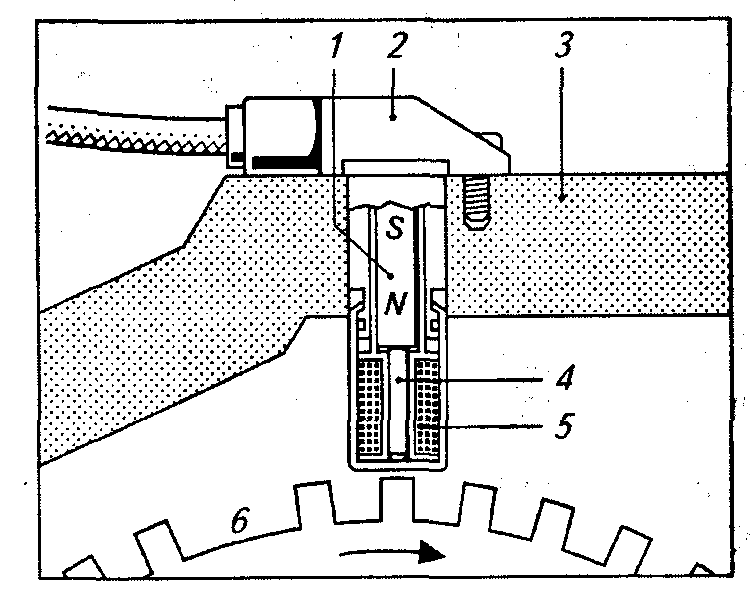
Рис.6.40.
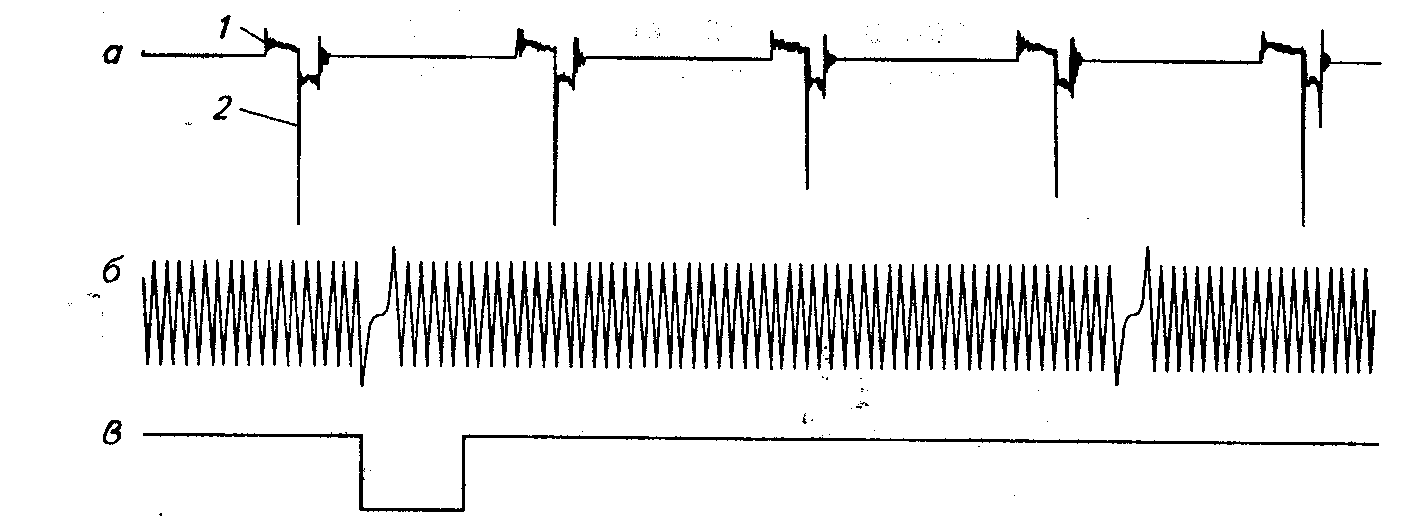
Рис. 6.41.
Боковые фронты прямоугольного напряжения передаются через вход прерываний на процессор. Если текущий период прохождения фронтов в два раза больше как предыдущего, так и последующего, то происходит распознавание опорного промежутка в зубьях. Он сопряжен с определенным положением коленчатого вала. Процессор производит в данный момент синхронизацию положения коленчатого вала. При каждом последующем положительном или отрицательном фронте от боковых кромок зубьев процессор производит дальнейший отсчет положения коленчатого вала на три градуса. Подача сигнала зажигания должна производиться с меньшими шагами. Период между двумя боковыми кромками зубьев разделяется, поэтому, на четыре отрезка. К каждой боковой кромке зуба можно привязать один, два или три таких отрезка времени (благодаря этому можно производить выдачу сигнала зажигания с шагом 0,75 градуса).
Датчик положения распределительного вала. Распределительный вал управляет впускными и выпускными клапанами двигателя. Частота его вращения в два раза ниже, чем частота вращения коленчатого вала.
Информация о положении распределительного вала необходима, если реализуется индивидуальная установка момента впрыска топлива для каждого цилиндра, что имеет место при фазированном (последовательном) впрыске, а также при использовании системы зажигания с низковольтным распределением и индивидуальными катушками.
Для определения положения распределительного вала используется датчик на эффекте Холла. Датчик управляется шторкой из магнитопроводящего материала, закрепленной на распределительном валу.
Напряжение с датчика Холла имеет порядок милливольт, поэтому датчик формирует сигнал и передает его в блок управления в виде двоичного сигнала. В простейшем случае процессор проверяет наличие напряжения с датчика Холла и тем самым положение первого цилиндра в рабочем такте в момент прохождения опорного промежутка зубчатого диска. Специальные формы шторок позволяют использовать сигнал положения распределительного вала в качестве аварийного при повреждении датчика частоты вращения. Разрешающая способность сигнала датчика положения распределительного вала является недостаточной для его применения вместо датчика частоты вращения в нормальном режиме.