

10828
.pdf61

62
ЗАДАЧИ ДЛЯ САМОСТОЯТЕЛЬНОГО РЕШЕНИЯ Литература: [1, гл. 2,4]; [2, гл. 4].
Пример 4.1. Аналитически определить усилия в указанных стержнях ферм от заданной нагрузки(рис.4.14).
Результатырешения:1)V2 =20кН;O2 =-20кН;
2)Оъ =-40кН;V2 =-44,72кН;V3 =20кН;
3)О1 =23,72кН;V2 =7,5кН;
4)U2-47,44кН;Д4=-15,81кН;
5)О1=-10кН;Д3 =-14,14кН;
6)О1=-20кН;Д3 = -14,14 кН; U4 = - 30 кН.
Пример4.2.Вычислить усилиявуказанныхстержняхферм(рис.4.15-4.17).
Пример 4.3 Определить знаки усилий в стержнях фермы (рис.4.19, 4.20), загруженных силой Р.Определитьзнакиусилийвстержнях ферм(рис.4.21,4.22).
5. ОПРЕДЕЛЕНИЕ ПЕРЕМЕЩЕНИЙ ВСТАТИЧЕСКИ ОПРЕДЕЛИМЫХ СИСТЕМАХ
Силовые, температурные и кинематические воздействия вызывают перемещения точек и сечений статически определимых систем (∆ ,∆ ,∆ ). Перемещения различают:
линейные по заданному направлению; истинное перемещение точки; взаимное ли-
нейное перемещение точек; угловое перемещение сечения; взаимное угловое перемещение сечений.
5.1 Определение перемещений от заданной нагрузки
Перемещения в статически определимых системах от нагрузки находятся по формуле Мора-Максвелла:
|
|
|
|
|
|
|
(5.1) |
∆ = |
+ |
+ |
|
||||
|
|
||||||
где т - число участков или стержней; |
, , - изгибающий момент, поперечная и |
||||||
продольная силы в рассматриваемом сечении системы, вызванные действующей на-
грузкой; |
- внутренние усилия в том же сечении, вызванные единичным си- |
||
ловым фактором, , |
, определяющим точку и направление изучаемого перемещения. |
||
Единичными силовыми факторами являются: сосредоточенная сила |
|
при вы- |
|
|
|
вычислении |
|
числении линейных перемещений или сосредоточенный момент =1 при= 1 |
|
||
угловых перемещений. Для систем, стержни которых работают в основном на изгиб
(балки, рамы), влияние поперечных и продольных сил незначительно, и ими в прак-
тических расчетах пренебрегают. Поэтому перемещения выражаются в виде:
63
∆ = |
|
(5.2) |
|
||
|
|
Знак перед интегралом на рассматриваемом участке следует принимать положительным, если обе перемножаемые эпюры расположены по одну сторону от оси стержня, и отрицательным, если эпюры расположены с разных сторон от оси стержня. Для систем, элементы которых работают в основном на центральное растяжение - сжатие (фермы), используют формулу:
∆ = |
|
, |
(5.3) |
|
а учитывая, что стержни ферм обычно по длине имеют постоянную жесткость, и при узловой нагрузке усилия в пределах длины стержня не меняются, формула (6.3) принимает вид:
∆ = |
|
= |
|
, |
(5.4) |
|
где - физико-геометрическая характеристика стержня.
5.2Вычисление интеграла Мора-Максвелла
5.2.1ПравилоА.Н.Верещагина
На прямолинейном участке стержня длиной lи постоянной жесткости вычисление интеграла в формуле перемещений (6.2) может быть сведено к перемножению
эпюр, если одна из подынтегральных функций линейная:
= |
|
(5.5) |
|
||
|
|
где - площадь криволинейной эпюры изгибающих моментов; - ордината прямо-
линейной эпюры изгибающих моментов, взятая в сечении под центром тяжести кри-
волинейной эпюры. Для систем, состоящих из прямолинейных стержней постоянной
жесткости на части или всей их длине, подынтегральная функция |
- кусоч- |
но-линейная на т участках, и перемещения вычисляются по правилу А.Н.Верещагина:
∆ = |
|
(5.6) |
|
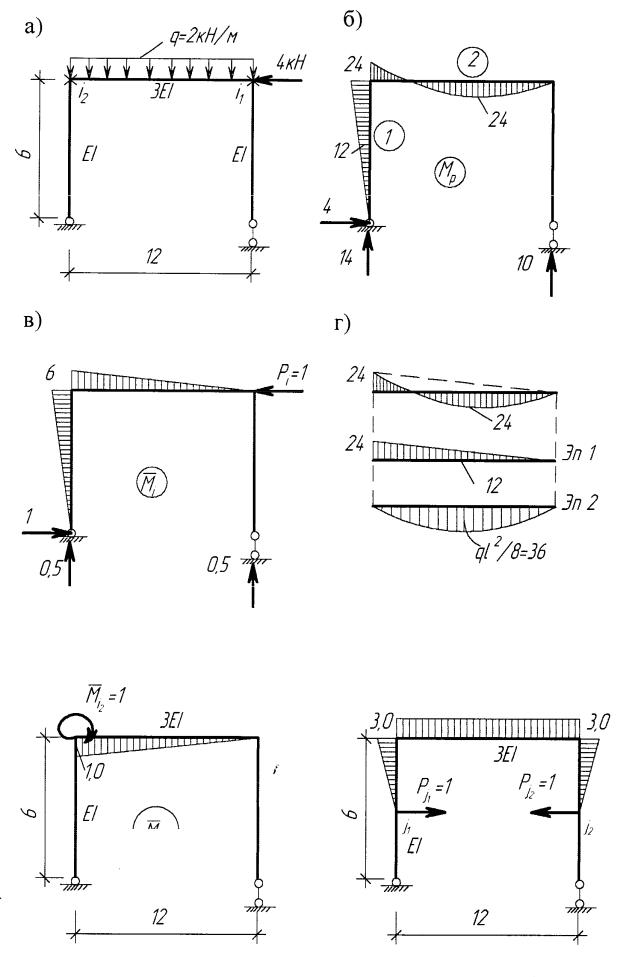
Пример 5.2.1. Определить горизонтальное перемещение правого узла рамы
точки от нагрузки (рис.5.1 а).
64
Рис. 5.1
Рис. 5.2
Рис. 5.2 |
|
Рис. 5.3 |
|
|
|

65
Решение:
Строим эпюры в заданной раме:
1)от нагрузки (рис. 5.1 б);
2)от силы =1, приложенной в т. по направлению перемещения (рис.5.1 в).
Эпюры только на двух участках (1), (2). Для упрощения расчетов, представим эпюру на участке (2) в виде двух эпюр (рис. 5.1 г). Суммарная эпюра двух последних должна быть эквивалентна исходной.
Вычисление перемещения по Верещагину:
|
1 |
|
1 |
|
2 |
1 |
|
2 |
|
2 |
|
1 |
|
|||
∆ , = |
|
= |
|
∙ |
2 |
∙6∙24∙ |
3 |
∙6 + ( |
2 |
∙24∙12∙ |
3 |
∙ 6 − |
3 |
∙36∙12∙ |
2 |
∙6) |
|
|
|||||||||||||||
1192
∙3 Е = Е (м).
Здесь знак «−» в скобках при втором слагаемом указывает на то, что пере-
множаемые эпюры расположены с разных сторон стержня.
Пример 5.2.2. Для той же рамы примера 1. определить угловое перемещение
левого узла рамы точки |
от нагрузки (рис. 5.2). |
||||||||||||||||
Решение: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Строим эпюру от единичного момента |
|
|
|
|
= 1. Направление момента выбираем |
||||||||||||
|
|
|
|
||||||||||||||
произвольно (по часовой стрелке). Определяем перемещение |
|||||||||||||||||
1 |
2 |
|
1 |
|
|
1 |
|
|
|
2 |
|
|
16 |
|
|||
∆ =Знак |
«+»( ∙36∙12∙ |
|
∙1 − |
|
∙24∙12∙ |
|
∙1) = |
|
|
|
(м). |
||||||
2 |
2 |
3 |
Е |
||||||||||||||
3 Е |
3 |
|
|
|
|
|
|
|
|
|
|||||||
|
|
говорит о том, что направление углового смещения узла происходит |
|||||||||||||||
по выбранному направлению |
|
|
. |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
||||||||||
Пример5.2.3. Для заданной рамыопределить взаимное линейное смещение точек от заданной нагрузки. Прикладываем к точкам j1 и j2взаимно уравновешивающую систему сил и строим эпюру (рис. 5.3).
Решение: Определяем перемещение
∆ = |
1 |
( |
1 |
∙3∙3∙ |
2 |
∙24+ |
1 |
∙12 |
+ |
1 |
1 |
∙24∙12∙3 |
|||
|
1 |
|
Е |
2 |
|
3 |
|
|
3 |
|
|
3 Е |
2 |
|
|
|
|
3 |
|
|
|
|
|
54 |
|
|
|
|
|
||
− |
3 Е |
|
2 |
∙36∙12∙3 |
|
= − |
Е |
(м). |
|
|
|
|
|||
5.2.2 ФормулаСимпсона
Вычисление интеграла в формуле (5.2) может быть выполнено по формуле Симпсона:
( ) = 3 [ +4( + + + ) +2( + + + )+ ]
Если подынтегральная функция на двух смежных участках длиной dизменяется по квадратичной параболе при четном количестве участков п , где , ,…, - значения функции в этих точках.
66
В частном случае при двух участках длиной d= l/2 формула Симпсона:
( ) = 6( + 4 + )
дает точный результат, если f(x) - многочлен не выше третьей степени. При ку- сочно-гладкой функции f(x) это выражение будет справедливо в каждом из «m» участков.
Поэтому для вычисления интеграла в формуле (6.2) получим выражение:
|
|
|
|
|
|
|
= |
6 |
|
|
|
лев |
лев +4 |
|
ср ср + |
|
пр пр |
(5.7) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
||||||||||||||
где |
|
лев |
|
лев |
|
|
пр |
|
пр - значения изгибающих моментов |
по концам участка l, |
||||||||||
|
|
|
|
|
||||||||||||||||
|
, |
ср |
− |
значения, , |
изгибающих моментов в среднем сечении участка l. |
|||||||||||||||
|
||||||||||||||||||||
|
|
ср |
, |
|
||||||||||||||||
Произведение ординат считается положительным, если направления изгибающих моментов совпадают, и отрицательным - если не совпадают.
Пример 5.2.4. Определить горизонтальное перемещение правого узла рамы точки от нагрузки (рис.5.1 а), используя формулу Симпсона.
Решение:
Строим эпюры в заданной раме:
1)от нагрузки (рис. 5.1 б);
2)от силы =1, приложенной в т. по направлению перемещения (рис.5.1 в);
3)определяем горизонтальное перемещение:
∆ = (0∙0+4∙3∙12+6∙24)+ ∙ (6∙24− 4∙3∙24+0∙0)= (м).
Здесь знак «−» в скобках при втором слагаемом указывает на то, что перемножаемые эпюры расположены с разных сторон стержня.
Пример 5.2.5 Определить вертикальное и угловое перемещение правого узла рамы i (рис.5.4 а).
Решение:
|
|
1. |
Строим эпюру изгибающих моментов от заданной нагрузки |
|
(рис.5.4 б). |
||||||||||||||||||||||||||||||||||||
|
|
2. |
Строим эпюру изгибающих моментов от единичного силового фактора |
= 1 |
|||||||||||||||||||||||||||||||||||||
(рис.5.4 в). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
3. |
Определяем прогиб узла |
i, |
|
используя формулу Симпсона: |
|
|
|
|
|||||||||||||||||||||||||||||||
∆ = |
|
|
( |
5 |
∙ |
2 |
+ |
4∙9 |
|
|
∙ |
+ |
3 |
|
|
∙ |
|
|
) + |
|
|
|
|
( |
3 |
|
|
∙ |
|
+ |
4∙5 |
|
∙ |
|
+0∙ 0) |
|
|||||
6 |
|
2 |
|
2∙6 |
|
|
2 |
|
4 |
|
|||||||||||||||||||||||||||||||
|
|
8 |
3 |
|
16 |
|
|
|
1 |
|
8 |
|
|
|
1 |
|
|
8 |
|
|
|
32 |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
4∙3 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
467 |
|
|
|
|
|
||||||
+ |
2∙6 |
|
|
0∙0+ |
32 |
∙ |
∙ |
4 |
+ |
8 |
|
|
∙ |
2 |
+ |
|
|
∙ |
2 |
∙ |
8 |
∙ |
2 |
∙ |
2 |
= |
768 |
= 0,249(м). |
|
||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
4. Строим эпюру изгибающих моментов от единичного силового фактора Мi= 1 (рис.5.4 г).
5. Определяем угловое перемещение правого узла i, используя правило Верещагина:
|
1∙ |
∙2 |
|
2 |
|
5 |
|
1 |
|
5 |
|
67 |
∙2 |
|
1 |
|
9 |
|
∆ = − |
∙ |
∙ |
+ |
∙ |
− |
1∙ |
∙ |
= − |
= −0,0288(рад) |
|||||||||
2∙6 |
3 |
8 |
3 |
8 |
2∙2∙3∙ |
8 |
16 |
|||||||||||
Знак «минус» показывает, что угловое перемещение узла i происходит в направлении, противоположном Мi= 1.
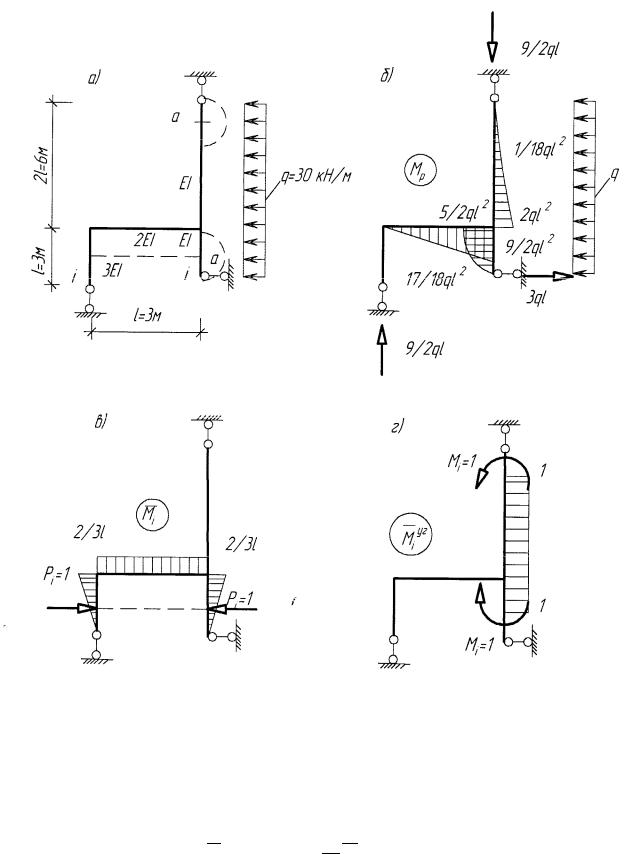
Пример 5.2.6. Определить взаимное горизонтальное перемещение точек i и
взаимное угловое перемещение сечений «а» рамы (рис.5.5) от заданной нагрузки
|
q= 30 кН/м при EI = 10 кНм . |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
Решение: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
1. Строимэпюру изгибающих моментов в заданной раме от заданной нагрузки |
|||||||||||||||||||||||||||
|
Мр . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
2. Строим эпюру изгибающих моментов |
|
|
|
|
в заданной раме от единичного |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
силового фактора |
Pi= 1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
3. Определяем взаимное горизонтальное перемещение сечений i: |
||||||||||||||||||||||||||||
|
|
|
|
1 |
1 |
|
|
9 |
|
|
2 |
1 |
|
1 |
|
2 |
2 |
2 |
5 |
|
|
1 |
17 |
||||||||
∆ = − |
2 |
|
∙ |
2 |
|
∙ |
2 |
|
∙ |
3 |
2 |
− |
|
∙ |
2 |
∙ |
3 |
∙ |
3 |
3 |
∙ |
2 |
+ |
3 |
∙ |
18 |
|||||
|
|||||||||||||||||||||||||||||||
1 |
2 |
2 |
|
|
2 |
|
1 |
|
|
|
|
1165 |
|
|
|
|
|
|
|
|
|
|
|
||||||||
− |
|
∙ |
3 |
∙ |
3 |
∙ |
( |
3 |
) |
∙ |
2 |
∙ |
3 |
= − |
971 |
|
|
= −0,019м. |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||
Знак «минус» показывает, что взаимное горизонтальное перемещение сечений будет происходит в направлении, противоположном Pi= 1.
|
|
4. Строим эпюру изгибающих моментов |
|
|
|
углв заданной раме от единичного |
|||||||||||||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
силового фактора |
Mi= 1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
5. Определяем взаимное угловое перемещение сечений «а»: |
|||||||||||||||||||||||||||||||||
|
|
|
угл |
1 |
1 |
|
|
|
|
|
|
|
|
1 |
|
1 |
|
|
2 |
5 |
1 |
|
5 |
|
|
||||||||||
|
1 |
∆ |
|
= − |
2 |
( |
8 |
+2 |
1 |
)(2 − |
3 |
) − |
|
|
|
∙ |
3 |
∙ |
3 |
∙ |
8 |
( |
3 |
) |
∙1 = −0,00125(рад) |
||||||||||
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
5 |
|
17 |
|
|
2 |
|
5 |
2 |
|
1 |
2 |
|
|
|
|
|
|
|
25 |
|
|
= −0,00125(рад). |
||||||||||||
− |
2 |
2 |
|
+ |
18 |
|
|
3 |
∙1 − |
|
|
( |
3 |
∙ |
3 |
∙ |
8 |
( |
3 |
) |
|
∙1 = |
− |
162 |
|||||||||||
|
|
|
|
|
|||||||||||||||||||||||||||||||

68
рис. 5.4
69
Рис. 5.5
5.3Определение перемещений от изменения температурного режима
Перемещения в статически определимых системах при изменении темпе-
ратурного режима определяются по формуле:
∆ = |
+ |
∆ |
, |
(5.8) |
|
где m- число участков с меняющимся температурным режимом, α - коэффициент линейного расширения материала, = ( + )/2- приращение температуры на

70 |
|
|
|
|
|
|
|
|
|
уровне нейтрального слоя стержня; |
|
|
- разность температур; |
|
- |
||||
внутренних волокон стержня; h - высота по- |
|||||||||
приращение температуры наружных∆и = ( |
|
) |
|
|
|
|
|
, |
|
перечного сечения стержня в плоскости изгиба; |
|
|
|
|
|
– выражения продольной |
|||
силы и изгибающего момента в произвольном сечении, |
стержня с меняющейся тем- |
||||||||
пературой, вызванные единичным силовым фактором, определяющим точку и на-
правления изучаемого перемещения. Единичными и силовыми факторами являются:
сосредоточенная сила Рt=1 при вычислении линейных перемещений или сосредо-
точенный момент =1при вычисленииугловых перемещений. При постоянных по
длине стержня высоты поперечного сечения |
hи приращений температур |
, |
||||||||||||
формула для вычисления перемещений принимает вид: |
|
|
||||||||||||
|
|
|
|
|
∆ = |
|
+ |
|
∆ |
, |
(5.9) |
|
||
|
|
|
|
|
|
|
|
|
|
|
||||
где |
|
|
|
|
- площади эпюр продольных сил и изгибающих моментов настержне с |
|||||||||
|
|
|||||||||||||
меняющейся, |
температурой от единичного силового фактора. Каждое слагаемое в (5.9) |
|||||||||||||
считается положительным, если деформации, вызванные единичным силовым фак-
тором и изменением температурного режима совпадают, и отрицательным, если эти деформации не совпадают.
Пример 5.3.1Определить горизонтальное перемещение точки i, вызванное из-
менением температурного режима в ригеле и стойке металлической рамы (рис. 5.6, а)
при |
|
|
= 0,5 м, ст = 0,4 ми |
= 1,2∙10 |
град . |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Решение: |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
1. Строим эпюру продольных сил |
|
в заданной раме от единичного силового |
|||||||||||||
|
|
|||||||||||||||
|
2. |
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
фактора |
1 (рис.5.6, б). |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Строим эпюру изгибающих моментов |
|
|
|
в заданной раме от единичного си- |
||||||||||
лового фактора |
1 (рис.5.6, в). |
|
|
|
|
|
|
|||||||||
|
|
|
|
горизонтальные перемещения точки i. |
||||||||||||
|
3. Определяем= |
|
|
|
|
|
|
|
|
|
|
|
||||
∆ = 1,2∙10 |
−10+20 |
∙1∙10 −1,2∙10 |
10+20 |
6+3 |
∙10+1,2 |
|||||||||||
|
|
30+20 |
2 |
|
|
30 −20 |
|
1 |
0,5 |
2 |
|
|||||
∙10 |
Знак "минус∙0,3∙6+1,2∙10" |
|
|
|
|
|
∙ |
|
|
∙3∙3 = −0,03111м |
||||||
0,4 |
|
2 |
||||||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
||||||
|
|
|
|
показывает, что горизонтальное перемещение точки i происходит в |
||||||||||||
направлении, противоположном направлению |
|
|
|
=1. |
|
|
||||||||||
5.4 Определение перемещений от кинематическихвоздействий
Перемещения в статически определимых системах при кинематических воздей-
ствиях определяются по формуле: