

10621
.pdf-150 -
1.2.2.Степени свободы и статическая определимость системы
Все системы в механике можно разделить на два класса: неизменяемые системы (НС) и изменяемые системы (ИС).
Определение 1.1. Неизменяемыми, или неподвижными будем называть системы, элементы которых не могут перемещаться относительно друг друга или относительно земли, если они являются абсолютно твердыми, то есть недеформируемыми.
Изменяемыми, или подвижными будем называть системы, элементы которых могут перемещаться относительно друг друга или относительно земли, оставаясь абсолютно твердыми.
НС могут воспринимать любую нагрузку, ИС – только определенные виды нагрузок.
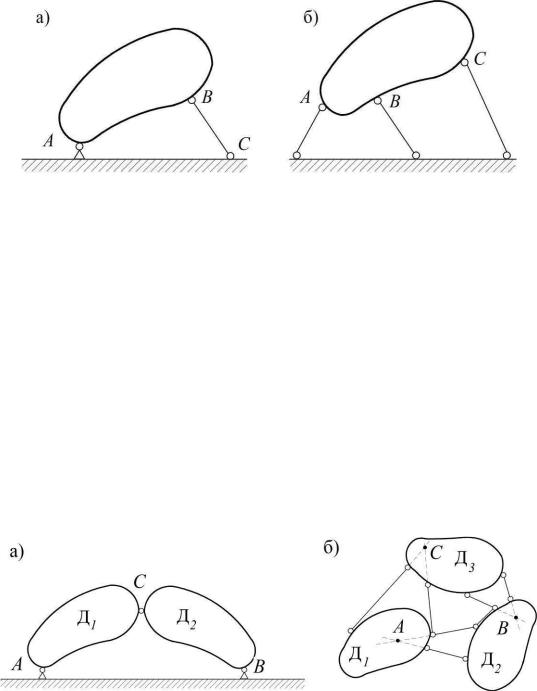
Например, рама на рис. 1.10, а является НС и может воспринимать как горизонтальную, так и вертикальную нагрузку, оставаясь в положении равновесия. А раму на рис. 1.10, б можно загрузить вертикальной нагрузкой, но она не способна воспринимать горизонтальную нагрузку, под действием которой она придет в движение – подобно незакрепленному на рельсах монтажному крану под действием ветра.
Нетрудно догадаться, что в строительстве в основном применяют неизменяемые системы – изменяемые здесь используют сравнительно редко и с большой осторожностью (в отличие от машиностроения, где наоборот - интерес представляют изменяемые или подвижные системы).
Все неизменяемые системы делятся на статически определимые (СОС) и статически неопределимые системы (СНС).
Напомним, что СОС – это системы, для которых число неизвестных реакций внешних и внутренних связей не превышает максимально допустимого числа уравнений статики, которые можно составить для их определения.
Если число неизвестных больше максимально допустимого числа уравнений, система называется СНС. При этом разность между числом неизвестных и числом уравнений называется степенью статической неопределимости системы.
Чтобы описать изменяемые системы введем следующее определение.
Определение 1.2. Под степенью свободы системы W будем понимать минимальное число параметров, определяющих ее положение в пространстве.
Очевидно, что для неподвижных систем W = 0, а для подвижных W ³ 1. Для точки на плоскости W = 2, и в качестве параметров можно выбрать ее декартовы координаты. Чтобы однозначно определить положение твердого тела (диска) на этой плоскости нужно задать уже три параметра. Например, координаты фиксированной точки A этого диска - xA , yA и угол наклона j принадлежащего ему отрезка AB (рис. 1.6). Таким образом, для диска W = 3, а система N дисков на плоскости будет иметь 3N степеней свободы.
Если два свободных диска на плоскости (W = 6) соединить одной линейной связью C1C2, получим систему с пятью степенями свободы (рис. 1.7), по-

- 151 -
скольку к трем параметрам для первого диска добавятся углы ϕ1 и ϕ2, определяющие положение стержня C1C2 относительно диска Д1 и диска Д2 относительно точки C2. Аналогично, система двух дисков, соединенных двумя линейными связями (или шарниром) будет иметь 4 степени свободы.
Рис. 1.6
Рис. 1.7
Естественно предположить, что всякое наложение дополнительной связи уменьшает степень свободы системы на единицу, поэтому для произвольной плоской системы ее можно найти по формуле:
|
W* = 3Д − 2Ш − СО , |
(1.1) |
где W* – |
предполагаемая или условная степень свободы системы; |
|
Д – |
число дисков; |
|
Ш – |
число простых шарниров, соединяющих диски друг с другом; |
|
- 152 -
СО – число опорных связей.
Как видим, при рассмотрении любой системы возможны три варианта:
1)W* > 0 – система заведомо подвижна;
2)W* = 0 – система имеет минимальное число связей, необходимых для
еенеизменяемости;
3)W* < 0 – система содержит избыточные связи.
На самом деле наше предположение о том, что в формуле (1.1) W* = W
неверно. Дело в том, что не всякая дополнительная связь уменьшает степень свободы системы – нетрудно представить связь, которая просто дублирует наложенную ранее, не меняя степени свободы системы.
Итак, условие W* £ 0 является необходимым, но недостаточным для образования неподвижной системы.
Если все-таки при условии W* < 0 система окажется неподвижной, то она одновременно будет и статически неопределимой, а число ее лишних связей можно найти по формуле:
Л = - W* = СО + 2Ш - 3Д. |
(1.2) |
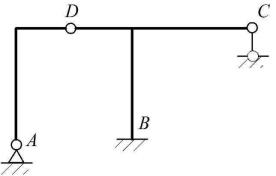
Пример 1.1. Определить число лишних связей рамы (рис. 1.8).
Рис. 1.8
Решение. 1) Методом теоретической механики: общее число неизвестных реакций в опорах А, В, С и соединительном шарнире D равно восьми, максимально допустимое число уравнений для их определения – 6 ( по три для каждого из дисков AD и DBC), число лишних связей Л = 8 – 6 = 2.
2) По формуле (1.2):
Л = 6 + 2×1 – 3 ×2 = 2. |
· |
Для плоских ферм применять формулы (1.1) и (1.2) неудобно: если С – число стержней фермы, а У – число ее узлов, то во-первых будет слишком много дисков Д = С, а во-вторых почти все шарниры будут кратными.

- 153 -
Гораздо проще найти степень ее свободы из следующ их соображений: каждый узел имеет две с тепени свободы, а каждый стержень как линейная связь, уменьшает общее ч исло степеней свободы на единицу, откуда получим:
W* = 2У – С – СО |
(1.3) |
Л = - W* = С + СО - 2У. |
(1.4) |
Пример 1.2. Определи ть степени свободы ферм (рис. 1.9) .
P 
Рис. 1.9
Решение. По формуле (1.3) находим:
–для схемы а): W* = 2×6 – 8 – 4 = 0;
–для схемы б): W* = 2×6 – 9 – 3 = 0.
1.Мы выяснили, что степень свободы зависит не только от того, какие элементы образуют систему, но и как они соединяются друг с другом. При неправильном образовании в одной части системы связи дублируют друг друга, а в другой – их недостаточно и система в целом оказывается изменяемой, как в примере на рис. 1.9, б. Вопрос о том, какие системы будут неподвижными, остается открытым.
2.Полезно рассмотреть еще одно определение.
Определение 1.3. Степень свободы системы W равна минимальному числу дополнительно введенных связей, прев ращающих ее в неизменяемую систему.

-154 -
1.2.3.Изменяемые системы
Ограничимся в дальнейшем рассмотрением систем, у которых условная степень свободы W* = 0.
Мы выяснили, что такие системы могут быть как изменяемыми, так и неизменяемыми, причем в последнем случае они будут статически определимыми. Для таких систем справедливо следующее определение.
Определение 1.4. Изменяемыми называются системы, которые получаются из неизменяемых систем при определенных критических значениях параметров.
Например, НС на рис. 1.10, а при α = 0 переходит в ИС на рис. 1.10, б. Это сопровождается превращением статически определимой системы (СОС) в СНС, поскольку число линейно-независимых уравнений для определения опорных реакций уменьшается на единицу. При этом ранг матрицы этих уравнений становится равным двум, а ее определитель – равным нулю:
det [ A ] = 0.
Изменяемые системы (W > 0, W* = 0) подразделяются на:
–геометрически изменяемые системы (ГИС);
–мгновенно изменяемые системы (МИС).
Рис. 1.10
Мгновенно изменяемые отличаются от ГИС тем, что допускают не конечные – как рама на рис. 1.10, б, – а только бесконечно малые перемещения. При этом значения параметров, о которых идет речь в определении 1.4, у ГИС остаются постоянными, а у МИС – изменяются при перемещении.
Кроме того, переход неподвижных статически определимых систем в МИС может сопровождаться появлением бесконечно больших опорных реакций.
Рассмотрим, например, НС на рис. 1.11, а. Для определения опорной реакции RB составим уравнение равновесия: ΣМА = 0, откуда найдем: RB = Pa/ .

- 155 -
Эта рама переходит в МИС на рис. 1.11, б при критическом значении параметра = 0. Нетрудно видеть, что предел RB при → 0 равен бесконечности.
Это может привести к разрушению реальной конструкции, поэтому такие МИС не применяют в строительстве.
Термин «мгновенно изменяемая система», подчеркивает, что под действием приложенной нагрузки реальная деформируемая система может занять новую конфигурацию, для которой значение параметра станет отличным от критического. При этом в рассматриваемом примере (рис. 1.11, б) точка В сместится вниз и реакция RB примет конечное значение.
Рис. 1.11
Итак, мы выяснили, что принадлежность системы к классу МИС крайне нежелательна. Поэтому перечислим некоторые признаки МИС:
1)два диска, соединенные шарниром, связаны с остальной частью системы или с землей при помощи двух других шарниров, лежащих на одной прямой
спервым (рис. 1.12);
2)диск, прикреплен к системе или к земле при помощи трех линейных связей, у которых линии действия реакций параллельны (рис. 1.13) или пересекаются в одной точке (рис. 1.14).
Рис. 1.12

- 156 -
P
P
Рис. 1.13 |
Рис. 1.14 |
Примечания
1.МИС на рис. 1.11, б соответствует первому из приведенных признаков, роль второ-
го диска выполняет подвижная опора В. Диск Д1 на рис. 1.14 выполняет роль третьей линейной связи по отношению к диску Д2.
2.Приведенные признаки МИС не являются исчерпывающими, и если исследуемая модель не отвечает им, то это не означает, что она не будет принадлежать к этому классу. Самым общим является аналитический метод исследования систем, основанный на рассмотрении уравнений равновесия для определения их опорных реакций.
3.Поскольку кинематический анализ связан с рассмотрением системы абсолютно твердых тел, он мог бы изучаться в курсе теоретической, а не как традиционно – строитель-
ной механики. Кстати, в [7] на с. 26–28 можно найти две МИС, ошибочно включенных в задание, где требуется определить опорные реакции составной конструкции.
1.2.4. Способы образования и структурный анализ
Рассмотрим два способа образования стержневых систем, которые будут неизменяемыми и статически определимыми. Другими словами, выясним, при каких условиях соотношение:
W* = 3Д − 2Ш − СО = 0 |
(1.5) |
будет не только необходимым, но и достаточным для образования таких систем.
Соединение диска с землей (соединение двух дисков). Диск прикреплен к земле
при помощи шарнира и линейной связи, линия действия реакции которой не проходит через этот шарнир (рис. 1.15, а).
Шарнир А можно заменить двумя линейными связями, у которых линии действия реакций пересекаются в точке, через которую не должна проходить реакция третьей линейной связи (рис. 1.15, б).
- 157 -
Рис. 1.15
Если диск Д2 присоединяется не к земле, а к диску Д1, получим систему, которую можно принять за новый диск, имеющий ту же степень свободы, что и
диск Д1.
Этот способ образования систем называется диадным – от названия простейшей фермы, образованной из двух стержней, соединенных шарниром В. Роль первого стержня выполняет незагруженный диск АВ (рис. 1.15, а).
Соединение двух дисков с землей (соединение трех дисков). Два диска соедине-
ны друг с другом и с землей при помощи трех шарниров, не лежащих на одной прямой (рис. 1.16, а).
Аналогично соединяются три диска, при этом каждый шарнир можно заменить двумя линейными связями, у которых точки пересечения линий действия реакций также не должны лежать на одной прямой (рис. 1.16, б).
Рис. 1.16
Этот способ образования систем называется способом трехшарнирной арки. Очевидно, что он является более общим и сводится к диадному, если диски Д1 и Д2 незагружены и , значит, их можно заменить стержнями АС и ВС, соединенными в точке С (рис. 1.16, а).
Нетрудно заметить, что ограничения, налагаемые на способы образования системы, нужны для того, чтобы избежать появления МИС.
Структурный анализ. Суть такого анализа заключается в исследовании уже существующей системы с точки зрения возможности ее образования двумя рассмотренными способами.
- 158 -
При этом:
– системы, образованные из нескольких дисков, образуют один новый
диск;
–при условии (1.5) ни один из присоединенных дисков не должен иметь лишних связей;
–вновь образованная система будет неподвижной (НС) и статически определимой (СОС).
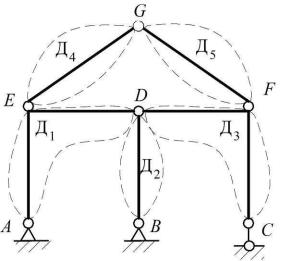
Пример 1.3. Выполнить структурный анализ рамы (рис. 1.17).
Рис. 1.17
Решение. Система состоит из пяти дисков, соединенных простыми шарнирами E, G, F и кратным шарниром D, эквивалентным двум простым.
Условная степень свободы по формуле (1.5):
W* = 3 × 5 - 2 × 5 - 5 = 0.
Диски Д1 и Д2 образуют по способу трехшарнирной арки новый диск Д1-2, жестко связанный с землей. К диску Д1-2 тем же способом при помощи шарнира D и линейной связи C присоединяется диск Д3, который образует новый и неподвижный относительно земли диск Д1-3. Наконец, к диску Д1-3 присоединяется диада Д4, Д5, образуя диск Д1-5. Таким образом, заданная система является СОС и НС. ·
Следует отметить, что системы могут быть образованы и другими способами – отличными от диадного и способа трехшарнирной арки, поэтому основанный на них структурный анализ не является универсальным методом исследования системы. Например, с его помощью нельзя дать ответ на вопрос об изменяемости рамы на рис. 1.18, поскольку ее нельзя образовать двумя указанными способами.
-159 -
1.2.5.Аналитическое исследование системы
Как уже отмечалось, этот метод исследования систем является самым общим.
Суть метода. Уравнения равновесия для определения опорных реакций исследуемой системы можно представить в виде:
|
[A]{X} = {B}, |
(1.6) |
где [A] – |
матрица коэффициентов при неизвестных; |
|
{X} – |
вектор-столбец неизвестных опорных реакций; |
|
{B} – |
вектор-столбец нагрузки. |
|
При этом для СОС любому вектору {B} однозначно соответствует единственный вектор {X}, что возможно только при условии: det [A] ¹ 0.
Учитывая, что в силу (1.5) СОС одновременно являются НС, можно сде-
лать вывод, что необходимым и достаточным условием неподвижной системы
будет: |
|
det [A] ¹ 0. |
(1.7) |
Наоборот, необходимым и достаточным условием подвижной системы
является:
det [A] = 0. |
(1.8) |
Таким образом, для кинематического анализа системы достаточно вычислить определитель матрицы соответствующей системы алгебраических уравнений. Но можно избежать даже этой процедуры, учитывая некоторые сложности которые она вызывает уже при четвертом порядке определителя.
Метод нулевой нагрузки. Рассмотрим однородную систему уравнений, соответствующую (1.6):
[A]{X} = {0}. |
(1.9) |
Известно, что она имеет только нулевое решение, если |
det [A] ¹ 0, и на- |
оборот – условием ненулевого решения будет: det [A] = 0. |
|
Отсюда – следующее правило: |
|
1)если система (1.9) имеет решение {X} = {0}, то соответствующая механическая система является неподвижной;
2)если система (1.9) имеет решение {X} ¹ {0}, то соответствующая механическая система является подвижной.
Пример 1.4. Выполнить кинематический анализ рамы (рис. 1.18). Решение. Воспользуемся методом нулевой нагрузки, применив графиче-
ский способ решения – см., например, [2], с. 53.