

10621
.pdf- 100 -
- 101 -
Теперь для построения М достаточно вычислить ее значение в точке
z = 4: M(4) = Mq(4) + Mp(4) + MM(4) = - 1 + 4 + 1 = 4кНм (рис.3.6б).
Переходим к построению эпюры Q.
На первом участке она обратносимметрична эпюре, приведенной на рис.3.4. На незагруженных участках балки эпюру Q легко построить по эпюре М, воспользовавшись зависимостью Q = dM / dz = tgα:
– на втором участке (2 ≤ z < 4) :
Q = tgα1= (4+2)/2=3 кН;
– на третьем (4 ≤ z < 6) :
Q = – tgα2= – (4– 2)/2= – 1 кН;
– на последнем четвертом участке (6 ≤ z < 8) М = const, поэтому Q = 0
(рис.3.6в).
По эпюре Q находим реакции опор (рис.3.6г) и выполняем статическую проверку правильности решения:
∑Y = -q × 2 + RA –P + RB = − 2 + 5 − 4 + 1 = 0 . |
∙ |
- 102 -
ГЛАВА 4. ГЕОМЕТРИЧЕСКИЕ ХАРАКТЕРИСТИКИ СЕЧЕНИЙ
Прочность балки при изгибе, в отличие от ЦРС, зависит не только от площади поперечного сечения, но и от формы этого сечения. В этом нетрудно убедиться на примере деревянной линейки, положенной плашмя или поставленной на ребро.
4.1. Статические моменты сечения
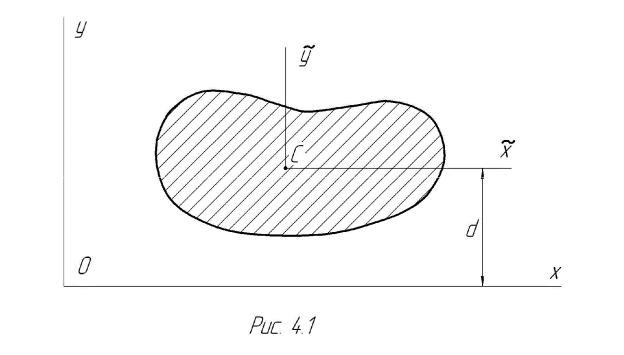
Рассмотрим произвольное поперечное сечение площадью F в системе координат Оху (рис.4.1).
Центр тяжести этого сечения, как известно из ТМ, определяется координатами:
xc |
|
|
yc |
|
|
|
= ∫ xdF / F ; |
= ∫ ydF / F . |
|
||||
|
F |
|
|
F |
|
|
Запишем эти формулы в виде: |
|
|
|
|
||
|
xc |
= Sy / F ; |
yc = Sx |
/ F ; |
(4.1) |
|
где Sx , S y - статические моменты сечения относительно осей Ox и Oy.
Очевидно, что каждый из этих моментов можно рассматривать как предел суммы элементарных площадей Fi , на которые разбито сечение, умноженных
на взятые со знаком ± расстояния от них до этих осей:
|
n |
Fi ) = ∫ ydF ; |
|
n |
Fi ) = ∫ xdF . |
|
S x |
= lim ∑ yi ( |
S y |
= lim ∑ xi ( |
(4.2) |
||
|
n→∞ i=1 |
F |
|
n→∞ i=1 |
F |
|
|
|
|
|
- 103 - |
|
|
|
|
|
|
||
Если сечение разбито не на элементарные |
Fi |
, а на конечные площади Fi , |
||||||||||
формулы (4.2), как и в методе разбиения из ТМ, примут вид: |
|
|||||||||||
|
|
Sx |
= ∑ Fi yi , |
Sy = ∑ Fi xi |
, |
|
(4.3) |
|||||
где xi , yi - координаты центров тяжести этих площадей. |
|
Cy , параллельные |
||||||||||
Проведем через центр тяжести С центральные оси Сx , |
||||||||||||
|
|
|
|
|
|
|
|
|
|
~ |
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
~~ |
осям Oх, Oу , и запишем формулы (4.1) в системе координат Сxy : |
||||||||||||
~ |
= S ~ / F = 0 |
|
~ |
= S~ |
/ F = 0 |
|
|
|||||
x |
c |
; |
y |
c |
. |
|
||||||
|
|
y |
|
|
|
x |
|
|
||||
Отсюда следует, что |
S ~ = S~ = |
|
0, т.е. статические моменты относи- |
|||||||||
|
|
|
x |
y |
|
|
|
|
|
|
|
|
тельно центральных осей равны нулю.
Отметим, что статические моменты измеряются в м3 или см3 и называются моментами первого порядка, т.к. равны произведению площади на расстоя-
ния в первой степени.
4.2. Моменты инерции сечения
Эти моменты являются моментами второго порядка и определяются следующим образом.
Момент инерции сечения относительно центра (оси) равен сумме произведений элементарных площадей на квадраты расстояний до этого центра (оси).
Переходя в этих суммах к пределу при стремлении элементарных площадей Fi к нулю, получим:
|
n |
|
( |
Fi ) = ∫ y2 dF ; |
|
J x |
= lim∑ yi2 |
|
|||
|
n→∞ i=1 |
|
|
F |
|
|
n |
|
( |
Fi ) = ∫ x 2 dF ; |
(4.4) |
J y |
= lim ∑ xi2 |
||||
|
n→∞ i=1 |
|
|
F |
|
|
n |
|
( |
Fi ) = ∫ r 2 dF. |
|
J o |
= lim ∑ri |
2 |
|
||
|
n→∞ i=1 |
|
|
F |
|
С учетом зависимости r = x2 + y2 получим из этих формул соотношение:
= + (4.5)
Jo J x J y
т.е. момент инерции относительно центра или полярный момент инерции равен сумме осевых.
ПРИМЕЧАНИЯ:
1.В этом курсе мы ограничимся изучением прямого изгиба и симметричных сечений, поэтому не будем рассматривать другие моменты инерции, необходимые для характеристики несимметричных сечений.
2.Моменты инерции измеряются в м4 или в см4 и, в отличие от статических моментов, всегда положительны.

-104 -
3.Радиусы инерции сечения относительно центра (io), или оси (iz) равны:
io = 
 J o
J o  F , iz =
F , iz = 
 J z
J z  F .
F .
4.3. Моменты инерции относительно параллельных осей
Для определения геометрических характеристик сложных сечений, составленных из стандартных прокатных профилей (двутавр, швеллер и др.), нужно знать соотношения между моментами инерции этих элементов относительно собственных центральных осей, приведенными в сортаменте, и моментами инерции относительно центральных осей всего сечения.
|
Рассмотрим две системы координат Оxy и Сxy (рис.4.1), связанные зави- |
|||||||||||
|
|
|
|
|
|
|
|
~~ |
|
|
|
|
симостями: |
|
|
~ |
~ |
|
~ |
+ d . |
|
|
|
||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
x = x |
+ xc ; y = y |
+ yc = y |
|
|
|
|||
|
Для момента инерции J x из (4.4) с учетом последнего соотношения полу- |
|||||||||||
чим: |
|
|
|
|
|
|
|
|
|
|
|
|
J x = |
2 |
~ |
2 |
~2 |
dF |
~ |
2 |
∫ dF = J~x |
+ 2dS~x + Fd |
2 |
= J~x + Fd |
2 |
∫ y |
dF =∫ (y |
+ d ) |
dF = ∫ y |
+ 2d ∫ ydF + d |
|
|
|
|||||
|
F |
F |
|
F |
|
F |
|
F |
|
|
|
|
,т.к. |
S~ |
= 0 (см. параграф 4.1). |
|
|
|
|
|
|
|
|||
|
x |
|
|
|
|
|
|
|
|
|
|
|
Таким образом, момент инерции сечения относительно какой-либо оси равен моменту инерции относительно параллельной ей центральной оси плюс площадь сечения, умноженная на квадрат расстояния между осями:
J |
x |
= J~ + F ×d 2 |
. |
(4.6) |
|
x |
|
|
4.4. Моменты инерции простых сечений
К числу наиболее распространенных форм поперечных сечений балок, особенно деревянных, относятся прямоугольник и круг.
Прямоугольник. Рассмотрим поперечное сечение балки шириной b и вы-
сотой h и определим его момент инерции (4.4) относительно оси |
~ |
− J ~ |
|
Сx |
|||
|
|
x |
|
(рис.4.2). |
~ |
|
|
Разобьем площадь сечения F на полоски шириной h и высотой |
и по- |
||
dy |
~ |
|
|
|
|
|
|
|
|
|
|
|
|
ложим dF = b × dy . Тогда интегрирование по площади F сведется к вычислению |
||||||||||||
одномерного интеграла: |
|
|
|
|
|
|
|
+ h / 2 |
|
|
||
|
|
|
~ 2 |
|
h / 2 |
~ |
~ 3 |
|
|
|
||
|
|
|
|
|
|
|
||||||
|
|
∫ |
|
∫ |
~ 2 |
by |
|
|
3 |
|
||
x |
= |
y |
dF = |
y bdy = |
|
|
= bh /12 |
. |
||||
J ~ |
|
|
3 |
|
|
|||||||
|
|
F |
|
|
−h / 2 |
|
|
−h / 2 |
|
|
||
|
|
|
|
|
|
|
|
|
||||
Итак, момент инерции прямоугольника: |
|
|
|
|
|
|||||||
|
|
|
|
J ~ |
= bh3 |
/12 |
|
|
|
|
(4.7) |
|
|
|
|
|
|
x |
|
|
|
|
|
|
|

- 105 -
Круг. Определим вначале момент инерции круга радиуса R относительно его центра О (рис.4.3). Проще всего вычислить соответствующий интеграл в (4.4), разбивая круг на кольца шириной dr и полагая dF равной площади этого кольца.
С точностью до бесконечно малых первого порядка dF = 2πr ×dr , поэто-
му:
|
R |
|
|
r |
4 |
|
R |
= πR |
4 |
|
|
|
|
|
|||||||
Jо = ∫r2dF =∫r2 × 2πrdr = 2π × |
|
|
|
|
. |
|||||
|
|
|
|
|
||||||
F |
O |
|
4 |
|
0 |
2 |
|
|||
Теперь с помощью (4.5) легко найти и J ~ |
= J ~ : |
|
|
|||||||
|
|
x |
|
|
y |
|
|
|||
|
J ~ = πR4 |
/ 4 |
|
|
|
|
|
|
|
(4.8) |
|
x |
|
|
|
|
|
|
|
|
|
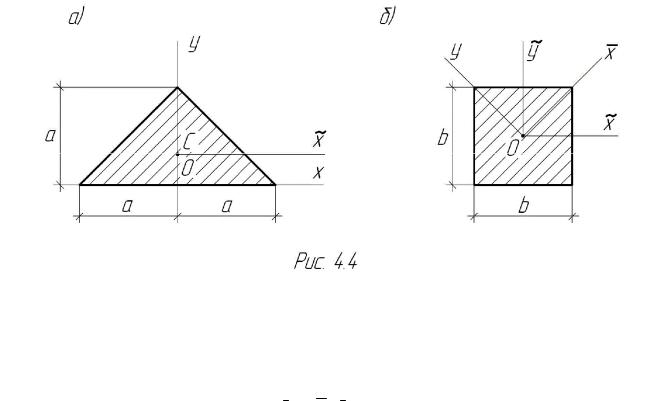
Пример 4.1. Вычислить центральный момент инерции балки треугольного поперечного сечения (рис.4.4а).
Решение. Рассмотрим сечение в виде квадрата со стороной b = a
 2 (рис.4.4б). Полагая в (4.7) h = b , найдем момент инерции квадратного сечения
2 (рис.4.4б). Полагая в (4.7) h = b , найдем момент инерции квадратного сечения
~ |
|
4 |
/12. |
относительно оси Оx : J ~ = J ~ = b |
|
||
x |
y |
|
|
Воспользовавшись для квадрата соотношением (4.5), получим:
- 106 -
J |
|
= J~ + J~ = J |
|
|
+ J |
|
|
|
o |
x |
y , |
||||||
|
x y |
|
||||||
откуда |
J |
|
|
= J~ = b4 |
/12. |
|
x |
||||||
|
|
x |
|
|||
Из (4.4) следует, что момент инерции составного сечения относительно какой-либо оси равен сумме моментов инерции отдельных частей этого сече-
_
ния относительно той же оси. Поэтому, представив квадрат на рис.4.4б в виде
двух треугольников, разделенных осью Оx , получим, что момент инерции каждого из них относительно оси Оx будет равен:
J xТР = 1 J xКВ = b4 / 24 .
2
Возвращаясь к рис.4.4а, найдем для заданной балки:
J xТР = b4 / 24 = 4a4 / 24 = a4 / 6 .
Центр тяжести треугольника отстоит от |
центра О |
на |
расстояние |
OC = a / 3, поэтому расстояние между осями Оx и |
~ |
= a / 3 . |
|
Cx равно d |
|||
Воспользовавшись зависимостью 4.6, получим: |
|
|
|
J xТР = J xТР - F ТР × d 2 = a4 / 6 - a2 (a / 3)2 = a4 /18 . |
· |
||
- 107 -
ГЛАВА 5. НОРМАЛЬНЫЕ НАПРЯЖЕНИЯ ПРИ ИЗГИБЕ
5.1. Предпосылки расчета
Мы выяснили, что напряжения в поперечном сечении балки статически эквиваленты внутренним усилиям, которые находят из условий равновесия ее отсеченной части. Однако, для расчета на прочность недостаточно определить М и Q − нужно знать именно напряжения σ и τ . Чтобы выразить последние через внутренние усилия (1.2), надо ввести дополнительные гипотезы, отражающие особенности деформирования балки и распределение напряжений по площади ее сечения, − подобные введенной при рассмотрении ЦРС.
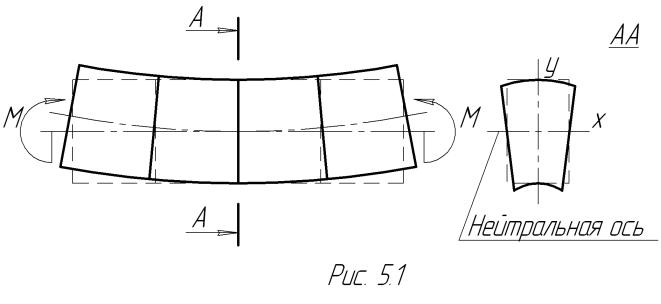
Для обоснования соответствующих предпосылок рассмотрим балку прямоугольного поперечного сечения в условиях чистого изгиба с нанесенной на ее боковой поверхности ортогональной сеткой (рис.5.1).
Как видим, ее нижние волокна − растягиваются, верхние − сжимаются, а образующие нейтральный слой − остаются недеформированными. При этом размеры сечения по оси Оу не меняются, а сами сечения остаются перпендику-
лярными к изогнутой оси балки.
Это позволяет ввести в рассмотрение две гипотезы.
1.Статическая гипотеза. Горизонтальные слои балки не давят друг на друга, т.е. σ у = 0 .
2.Кинематическая гипотеза. Сечения, перпендикулярные к оси балки до деформации, остаются перпендикулярными к ее изогнутой оси. При этом перемещения точек нейтрального слоя балки вдоль осей Ох и Оz равны нулю.
Как показывает опыт, применение этих гипотез оправдано и в случае поперечного изгиба балки.
- 108 -
Определение. Прямая, полученная пересечением нейтрального слоя с плоскостью поперечного сечения, называется его нейтральной осью.
ПРИМЕЧАНИЯ:
1. Кинематическая гипотеза, известная как гипотеза плоских сечений Я.Бернулли, фактически применялась нами еще в параграфе 2.1 при рассмотрении деформации ЦРС: вве-
денная там предпосылка о постоянстве σz в поперечном сечении стержня с учетом закона Гука (2.6) означала постоянство ε z , а в силу (2.4) − также и w.
2. Рассмотренные гипотезы, особенно в случае поперечного изгиба, соответствуют действительности только приближенно:
-вблизи мест приложения нагрузки нарушается статическая гипотеза о несдавливании горизонтальных слоев;
-первоначально плоские поперечные сечения при деформации могут искривляться и так далее.
Тем не менее, полученные на их основе результаты расчета вполне отвечают потребностям инженерной практики.
5.2.Перемещения и деформации
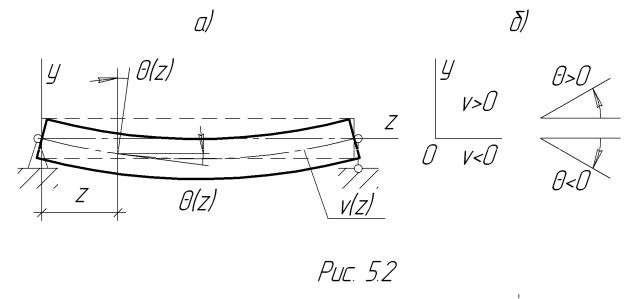
Рассмотрим балку в системе координат Oxyz , где ось балки совпадает с осью Оz , проходящей через нейтральные оси сечений (рис.5.2а).
z
Прогибами балки называются перемещения точек ее оси, которые с учетом кинематической гипотезы возможны только в направлении оси Оу .
Изогнутой осью балки называется кривая v(z) , которую принимает ось
балки при деформации.
Угол поворота сечения θ(z) равен углу наклона касательной к изогнутой оси балки. На основании гипотезы малости перемещений (параграф 1.4):
θ(z) ≈ sin θ ≈ tg θ = dv/dz . |
(5.1) |

- 109 -
Правило знаков − в соответствии с рис.5.2б.
Отметим, что в силу гипотезы Бернулли перемещения всех точек балки описываются перемещениями точек, лежащих в плоскости ее симметрии Oyz.
Чтобы проследить за точками балки, не лежащими на ее оси, рассмотрим консоль длиной z, защемленную на левом конце и загруженную на правом − моментом (рис.5.3).
Зафиксируем на свободном конце балки точку А − пусть она находится на расстоянии у от нейтральной оси, проходящей через точку С, и в результате деформации занимает в пространстве положение А′ .
Из А′ВС′ найдем модуль проекции вектора перемещения АА′ на ось Оz:
|w(z)| = A′B = A′C′sin θ = y sin θ. Принимая во внимание (5.1) и заменяя приближенное равенство строгим, получим с учетом знака w(z):
w(z) = −y tg θ = −y dw/dz. |
(5.2) |
|
В силу статической гипотезы отдельные слои балки ведут себя как при |
||
ЦРС, поэтому деформации можно найти по формуле (2.3): |
|
|
(2.3) |
(5.2) |
|
εz = dw / dz |
= − yd 2 v / dz 2 . |
(5.3) |
Таким образом введенные в предыдущем параграфе гипотезы, позволяют выразить перемещения и деформации точек балки через уравнение ее изогнутой оси v(z) .
ПРИМЕЧАНИЯ:
1. Фактически изменение длины волокна балки, проходящего через точку А ее сечения, равно не отрезку A′B = y sin θ , а отрезку A′B′ = y tgθ, и (5.1) означает, что A′B′
A′B (рис.5.3б).