

10366
.pdf41
При перемещении сердечника, например вниз (давление уменьшилось), напряжение u2 становится по амплитуде больше напряжения u1 и их алгебраическая сумма равна напряжению выхода uвых . Амплитуда напряжения на выходе датчика пропорциональна перемещению сердечника, а фаза напряжения характеризует направление перемещения относительно среднего положения. Это значит, что таким датчиком можно измерять как избыточное давление, так и разрежение (например, в топке котла).
В качестве датчика давления может применяться электроконтакт- ный манометр. Это шкальное устройство с переставным электрическим контактом или двумя контактами, например для регулирования давления по верхнему и нижнему значению. При достижении стрелки электрического контакта этот контакт замыкается или размыкается, и в результате включается исполнительное устройство. Электроконтактные манометры широко применяются для автоматизации систем теплоснабжения.
2.2.4. Датчики для измерения расхода
Датчики и методы измерения расхода жидкостей или газов подробно исследованы и освещены в литературе [6] и отличаются большим разнообразием.
Для систем теплоэнергетики имеет смысл рассмотреть датчики и метод измерения расхода по переменному перепаду давления, по постоянному перепаду давления и датчики индукционных расходомеров, т.к. все они наиболее часто применяются, особенно первый.
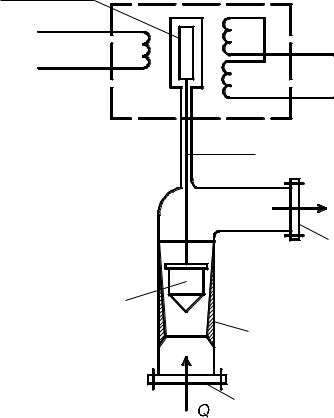
Для датчика расхода, работающего по переменному перепаду давления, в трубе необходимо установить сужающее устройство. Схема такого датчика представлена на рис. 2.12.
В этом случае измеренный расход Q по переменному перепаду давления можно представить зависимостью:
Q = kF0 
 ρ2 (P1 − P2) , м3/с
ρ2 (P1 − P2) , м3/с
где k – коэффициент пропорциональности; F0 – площадь сужающего устройства; P1 − P2 = P – перепад давления;
ρ – плотность жидкости.
Перемещение измерительной мембраны зависит от величины P , а величина P функционально отражает изменение расхода, поэтому напряжение uвых на выходе дифференциально-трансформаторного преобразователя зависит от расхода Q:
uвых = K1× Q
где K1 – коэффициент пропорциональности.

42
Подвижный сердечник
Дифференциально-трансформаторный  преобразователь
преобразователь
~ un = 12 B |
|
|
~ uвых |
|
Шток (тяга) |
Измерительная мембрана |
|
Импульсные трубки |
|
Q |
P2 |
P1 |
|
|
Суживающее |
|
устройство |
Рис. 2.12. Схематическая конструкция электрического бесшкального дифференциального манометра
Устройство, представленное на рис. 2.12, называют электрическим бесшкальным дифференциальным манометром.
Совместно с электронным вторичным прибором группы КСД он применяется для измерения расхода жидкостей, газов не только в системахтеплоэнергетики, но и в системах водоснабжения и других, отличается высокой надёжностью и достаточной для практических целей точностью измерения, сечение трубопроводов при этом не ограничивается.
К устройствам, измеряющим расход по принципу постоянного пере-
пада давления, можно отнести ротаметры и тахометрические расходо- меры.
Схема ротаметра с электрическим выходным сигналом представлена на рис. 2.13.
Принцип действия ротаметра подробно освещён в литературе [6]. Отметим лишь, что перемещение поплавка ротаметра функционально зависит от расхода жидкости или газа.
А поскольку подвижный сердечник дифференциальнотрансформаторного преобразователя соединён тягой (штоком) с поплавком, то выходное напряжение пропорционально расходу:
uвых = KQ ,
где K – коэффициент пропорциональности; Q – расход жидкости или газа.
43
Подвижный
сердечник
Дифференциально-трансформаторный  преобразователь
преобразователь
~ un = 12 B
uвых
Шток (тяга)
Q
Фланец
Поплавок
Корпус ротаметра
Фланец
Рис. 2.13. Схематическая конструкция ротаметра с электрическим выходным сигналом
Ротаметр представляет собой механический прибор для измерения расхода по месту со шкалой, а дифференциально-трансформаторный преобразователь (как электрический датчик расхода) совместно с электронным прибором группы КСД составят электрический расходомер, который можно применить для автоматизации систем теплоэнергетики.
Ротаметры применяются для измерения расхода жидкостей или газов в трубопроводах диаметром от 20 до 100 мм.
Тахометрические расходомеры применяются сравнительно редко, так как вносят возмущения в поток движущей жидкости или газа, трудности связаны также с установкой и герметизацией датчика. Датчиком расходомера является тахогенератор с крыльчаткой, установленные в трубе. Электрическое напряжение тахогенератора пропорционально частоте вращения крыльчатки, а частота вращения пропорциональна расходу вещества. В результате электрическое напряжение тахогенератора можно использовать в системах управления устройств, связанных с измерением и регулированием расхода.
Индукционные расходомеры не вносят возмущение в поток жидкости или газа. Схематическое изображение такого расходомера представлено

|
44 |
на |
рис. 2.14. Принцип действия индукционного расходомера ос- |
вещён в литературе [6].
Труба в поперечном
сечении
Вторичный uвых электронный
прибор
N  S
S
Электроды датчика |
Магнитные си- |
расхода |
ловые линии |
Рис. 2.14. Схематическая конструкция индукционного расходомера
Индукционные расходомеры применяются для измерения расхода жидкостей, электропроводность которых сопоставима с электропроводностью воды. Диаметр трубы при этом не ограничивается.
Конструктивно электроды датчика расхода устанавливаются в диаметральных точках трубы. В другой плоскости под углом 90º на трубе устанавливается магнит и охватывает её. Постоянный магнит может быть применён для труб малого сечения, но из-за постепенной потери свойств постоянный магнит малопригоден для практических целей, поэтому в приборах его заменяют электромагнитом, в результате конструкция датчика сильно усложняется. Напряжение на электродах датчика пропорционально магнитной индукции B, диаметру трубы D и скорости потока v:
uвых = B × D × v ,
а поскольку произведение D × v определяет расход жидкости, то напряжение uвых пропорционально этому объёмному расходу (м3/с). Отрезок трубы, где устанавливается датчик, должен быть изготовлен из магнитопрозрачного материала.
Индукционный датчик расхода совместно с вторичным прибором образуют расходомер. Выходное напряжение расходомера может быть использовано для автоматического управления процессом в той или иной системе ТГВ.
45
2.2.5.Датчики уровня
Краспространённым датчикам уровня можно отнести электродные датчики, ёмкостные датчики и поплавковые с дифференциальнотрансформаторным измерительным преобразователем.
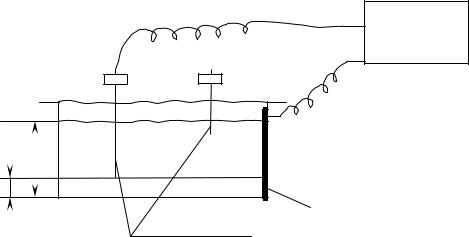
Принцип действия электродного датчика уровня основан на проводящих свойствах жидкости или сыпучего материала, заполняющих резервуар. Схематическое изображение электродного датчика представлено на рис. 2.15.
Вторичный прибор изме-
 рения уровня
рения уровня
LB
LH
Стальная полоса
Электроды
Рис. 2.15. Схематичное изображение электродного датчика
Электроды датчиков и стальная полоса выполнены из нержавеющей стали. Если электрод находится в жидкости, например в воде, то по цепи электрод – вода – стальная полоса течёт электрический ток. Вторичный прибор измеряет наличие тока и соответственно достижение жидкостью уровня LB или LH; если же электрод оказывается выше уровня жидкости, то цепь тока разрывается и прибор выдаёт, например световой сигнал или напряжение, характеризующее соответствующее состояние. Это напряжение используется в системе автоматического управления.
Ёмкостный датчик уровня может быть применён для измерения уровня жидкости или непроводящего сыпучего материала. Датчик состоит из электрода и гофрированной трубы, охватывающей электрод. Схематическое изображение датчика представлено на рис. 2.16.

|
46 |
|
Вторичный |
Электрод |
измерительный |
прибор |


 Труба
Труба
Рис. 2.16. Схематическое изображение ёмкостного датчика уровня
Труба и электрод составляют электрический конденсатор, емкость
которого C пропорциональна уровню L и диэлектрической постоянной ε :
C = ε × L .
Вторичный прибор измеряет ёмкость датчика, в результате измеряется уровень среды непрерывно с точностью до 1 мм, длина датчика может быть до 2,5 м.
Поплавковый датчик уровня с дифференциально-трансформаторным преобразователем (ДТП) применяется для измерения уровня (его отклонения) в сравнительно небольших пределах ± 20 мм (рис. 2.17).
Для измерения уровня воды в барабане котла применяется несколько похожий метод, но вместо поплавка используют дифманометр с ДТП. Дифманометр подсоединяется с помощью импульсных трубок к уравнительному сосуду, а уравнительный сосуд – к барабану котла. В результате осуществляется надёжное измерение уровня с точностью ± 1 мм.
ДТП
~ un
uвых
Поплавок
± L
L

47
Рис. 2.17. Схематическое изображение поплавкового датчика уровня с ДТП
2.2.6. Датчик для измерения влажности в системах кондиционирования воздуха
Влагочувствительным материалом датчика служит пористая керамика, полученная путём легирования хромата магния MgCr2O4 оксидом титана TiO2. В результате электрическое сопротивление R керамики функ-
ционально зависит от влажности M окружающего воздуха:
R = Ke-α ×M ,
где K и α – коэффициенты пропорциональности, учитывающие размеры и свойства керамики.
Статическая характеристика датчика представлена на рис. 2.18. Конструкция датчика влажности представлена на рис. 2.19.
R, Ом |
|
|
|
107 |
|
|
|
106 |
|
|
|
105 |
|
|
|
104 |
|
|
|
103 |
|
|
|
0 |
50 |
100 |
M, % |
Рис. 2.18. Статическая характеристика датчика влажности
Пористая керамика
Медный провод
Металлизированная
поверхность
Рис. 2.19. Схематическая конструкция датчика влажности
В процессе производства датчика на торцевые поверхности керамической заготовки наносится в вакууме слой металла (медь или алюминий), к этому слою привариваются с торцов медные проводники для присоединения датчика в измерительную схему вторичного электронного прибора.

48
2.3. Задающие устройства и элементы сравнения
Задающим устройством (задатчиком) устанавливается заданное значение регулируемой величины или изменение этой величины по определённой программе.
Вэлектрических регуляторах в качестве задающих устройств применяются, например потенциометры, делители напряжения на постоянных резисторах. Задатчик может иметь линейную или круговую шкалу с перемещающей или вращающей рукояткой или клавишный переключатель.
Впрограммных регуляторах задающее устройство выполняется, например в виде профильного диска (копира). Если применяется управляющая вычислительная техника, то задание записывается на магнитном диске или в постоянном запоминающем устройстве (ПЗУ).
Впневматических и гидравлических регуляторах в качестве задающих устройств применяются, например регулировочные винты со стрелкой и шкалой: при вращении винта меняется, например сила сжатия пружины или усилие на мембрану, изменяется сечение игольчатого клапана.
Вэлементе сравнения в соответствии с функциональной схемой САР происходит сравнение сигнала задания и сигнала, пропорционального текущему значению регулируемой величины. Результат сравнения – получение сигнала, пропорционального отклонению регулируемой величины.
Вэлектрических регуляторах в качестве элементов сравнения применяют, например сумматоры напряжения на резисторах, мостовые измерительные схемы.
Впневматических регуляторах функцию элемента сравнения выполняет, например узел «сопло – заслонка», мембранный блок, в гидравлических – золотниковые устройства и другие.
2.4. Усилители
Первичные преобразователи (датчики) автоматических систем контроля, регулирования и управления вырабатывают, как правило, небольшой по величине сигнал. Во многих случаях мощность этого сигнала составляет сотые – тысячные доли ватта, и её недостаточно для приведения в действие последующих звеньев. Для усиления сигнала первичного преобразователя по мощности в автоматических системах применяют усили-
тели.
Усилители характеризуются коэффициентом усиления по мощности
K:
K = Pвых , Pвх
где Pвых – мощность выходного сигнала усилителя; Рвх – мощность сигнала на входе усилителя.
49
Вусилителях для усиления входного сигнала и получения мощности выходного сигнала, достаточной для приведения в действие последующих звеньев, затрачивается энергия извне.
По виду потребляемой энергии усилители могут быть электрическими, пневматическими и гидравлическими. В зависимости от статической характеристики различают усилители релейного и непрерывного действия. К усилителям релейного действия относятся электрические, пневматические и гидравлические реле. В этих усилителях выходная величина измеряется скачком при достижении входной величины порога срабатывания реле.
Влинейных усилителях непрерывного действия наблюдается пропорциональная зависимость между изменением входной и выходной величины.
Усилители, потребляющие электрическую энергию, могут быть магнитными, электронными, электромагнитными.
Электронные усилители выполнены с применением полупроводниковых приборов (транзисторов, интегральных микросхем) и отличаются высокой надёжностью, малыми габаритами. Большим достоинством электронных усилителей является высокая чувствительность на входе, поэтому эти усилители применяются с датчиками, имеющими очень малую мощность сигнала.
Пневматические усилители в системах автоматики для усиления сигнала по мощности в зависимости от принципа действия подразделяются на поршневые, мембранные и струйные.
Гидравлические усилители в зависимости от принципа действия подразделяются на золотниковые, дроссельные и струйные.
2.5.Исполнительные механизмы и регулирующие органы
Исполнительный механизм автоматической системы – это устрой-
ство, приводящее в движение различные регулирующие органы (клапаны, дроссельные заслонки, задвижки, шиберы, краны и др.). Чтобы привести в движение исполнительный механизм, требуются затраты энергии извне. В зависимости от вида потребляемой энергии исполнительные механизмы могут быть электрическими, гидравлическими и пневматическими.
Электрические исполнительные механизмы применяются в комплек-
те с электрическими и электронными регуляторами. В этих исполнительных механизмах применяют двух- и трёхфазные асинхронные электродвигатели, тяговые электромагниты.
Схематическая конструкция тягового электромагнита представлена на рис. 2.20.

50
Пружина
Катушка
u
Сердечник из |
|
электротехнической |
|
стали |
Шток |
|
|
|
Шарнирное звено |
Рис. 2.20. Схематическая конструкция тягового электромагнита
На катушку электромагнита подаётся напряжение питания u. В катушке создаётся магнитное поле, пронизывающее сердечник, сердечник намагничивается и втягивается в катушку. При этом через шток и шарнирное звено передаётся перемещение регулирующему органу (заслонка, клапан, задвижка) в положение «открыто». Если напряжение питания u отключить, то сердечник под действием собственной массы и пружины опускается вниз и перемещает регулирующий орган в другое положение («закрыто»). Такая конструкция нашла широкое применение в клапанах – отсекателях газовых сетей как устройств автоматики безопасности.
Достоинство исполнительных механизмов с тяговыми электромагнитами – простота конструкций, быстродействие и возможность получения непосредственно линейных перемещений, недостаток – значительные габариты при больших усилиях на штоке, низкая точность перемещений, удары и рывки при работе, наличие релейной статической характеристики, не позволяющей получить пропорциональный закон регулирования.
Исполнительные механизмы, выполненные на основе применения электродвигателей с редукторами, могут быть однооборотными или многооборотными. В однооборотных исполнительных механизмах угол поворота выходного вала редуктора не превышает 360º. В многооборотных исполнительных механизмах выходной вал делает несколько оборотов или вращается непрерывно (рис. 2.21).
a)Трехфазное напря-
жение питания
L1 L2 L3
К
регулирующем
Статор эл. 


двигателя