

10366
.pdf11
АУ
Рис. 1.6. Функциональная схема системы адаптивного регулирования
Адаптивные, или самоприспосабливающиеся, системы автоматического регулирования обладают способностью приспосабливаться к изменению характеристик объекта и внешних возмущений, воздействующих на объект. Цели управления при этом достигаются за счёт изменения параметров настройки или изменения структуры самой системы регулирования. Функциональная схема адаптивной системы приведена на рис. 1.6.
Вадаптивной САР имеется обычный контур регулирования, включающий объект О и регулятор Р. Второй контур АУ (контур адаптивного управления) объединяет функциональные звенья адаптации: устройство оценки управляющего воздействия Y, возмущающего воздействия F и регулируемой величины X, вычислительное устройство ВУ и исполнительное устройство ИУ, обеспечивающее самонастройку.
Ввычислительном устройстве ВУ происходит запоминание внешних воздействий на объект и значений регулируемой величины, на основе этих данных осуществляется выбор параметров настройки или изменение структуры системы регулирования.
1.4. Системы автоматического контроля
Система автоматического контроля осуществляет контроль за состоянием или положением объекта при помощи соответствующих приборов и устройств.
 СП
СП
x(t )
О  ЧЭ
ЧЭ  У
У  УП
УП

12
 РП
РП
Рис. 1.7. Функциональная схема системы автоматического контроля
Функциональная схема этой системы (рис. 1.7) может быть представлена в виде такой последовательности обработки сигнала: восприятие информации и преобразование её в удобный для дальнейшего использования сигнал, усиление его и представление в сигнализирующих, показывающих и регистрирующих приборах.
В соответствии с этим можно выделить следующие функциональные элементы системы автоматического контроля:
ЧЭ – чувствительный элемент; У – усилитель; СП – сигнализирующий прибор;
УП – показывающий прибор; РП – регистрирующий прибор.
1.5. Объекты регулирования и их свойства
Объект регулирования является частью автоматической системы регулирования. Поэтому его свойства непосредственно влияют на работу и качество регулирования системы в целом. В системах теплоэнергетики такими объектами будут: участок газопровода, венткамера, котёл, тепловой ввод в здание, электропривод в различных установках и другое оборудование, в котором или при воздействии которого происходит технологический процесс.
Свойства объектов регулирования описываются с помощью стати-
ческих и динамических характеристик.
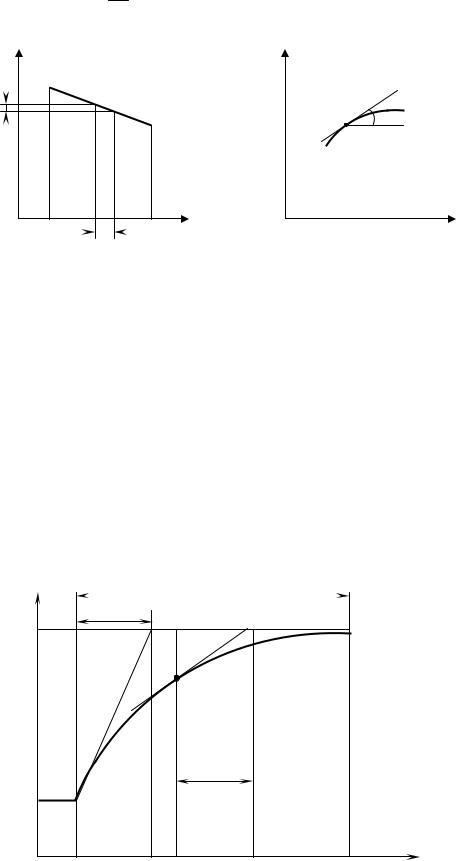
Под статической характеристикой понимается зависимость выходной (y) величины от входной (x) в установившемся режиме. Если статическая характеристика на некотором интервале x1, x2 описывается линейным уравнением и имеет вид прямой линии, она линейна, и объект можно назвать линейным в этом интервале (рис. 1.8а). Отношение приращения выходной величины y к приращению входной величины x называют ко-
эффициентом передачи объекта K; K = |
y . Если статическая характери- |
|
x |
стика описывается нелинейным уравнением, то она нелинейна, объект в
а) |
б) |
13
этом случае также нелинейный. Коэффициент передачи такого объекта можно определить как тангенс угла наклона касательной на участке её
рабочего диапазона: K = dy (рис. 1.8б).
|
dx |
y |
y |
y |
β |
x1 |
|
x |
x |
|
x2 |
|
x
Рис. 1.8. Статические характеристики объектов:
а – линейная статическая характеристика; б – нелинейная статическая характеристика
Динамическая характеристика показывает, как выходная величина изменяется с течением времени в результате регулирующего воздействия. Изменение выходной величины зависит от свойств объекта и от характера возмущения. Параметры объекта принято определять по динамической характеристике, представляющей изменение регулируемой величины во времени при скачкообразном изменении положения регулирующего органа. Такая характеристика называется переходной характеристикой объекта или характеристикой разгона. Из переходной характеристики можно определить постоянную времени Т и постоянную разгона tp (рис. 1.9).
tp
y |
T |
|
yycm
T
t
t0 |
t1 t2 |
t3 |
14
Рис. 1.9. Переходная характеристика объекта
Постоянная времени Т характеризует инерционность объекта; чем она больше, тем большей инерцией обладает объект. Время разгона tp – время, в течение которого выходная величина достигает установившего или близкого к нему значения.
Обычно принимают y = 0,95y ycm . Регулируемые объекты подразде-
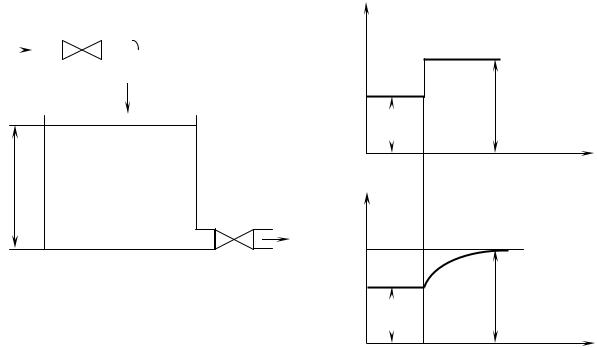
ляются на статические и астатические. Статическим объектом, или объектом с самовыравниванием, называют объект, способный после возмущения приходить в новое устойчивое состояние без помощи регулятора. Такие объекты называют также статически устойчивыми.
На рис. 1.10а показан статически устойчивый объект – резервуар с жидкостью. Регулируемой величиной x является высота уровня жидкости, а регулируемой величиной y – количество жидкости, поступающей в ёмкость. Жидкость вытекает из ёмкости по трубопроводу самотёком. На рис. 1.10б x1 и y1 соответствуют установившемуся процессу. При скачкообразном увеличении поступления жидкости уровень в ёмкости будет возрастать. Выход жидкости из ёмкости вследствие увеличения уровня также начнёт увеличиваться до тех пор, пока не наступит равновесие между притоком и выходом жидкости при новом установившемся уровне. Параметры x2 и y2 соответствуют новому установившемуся значению.
а) |
y |
|
|
|
|
б) |
y |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y2
y1
x |
t |
в) x
x2
x1
t
15
Рис. 1.10. Пример статического объекта:
а– схема объекта; б – вид ступенчатого воздействия; в – переходная характеристика
Суменьшением поступления жидкости установится соответственно более низкий уровень. Чем больше величина самовыравнивания, тем меньше отклонение регулируемой величины от состояния равновесия, имевшего место до приложения возмущающего воздействия. Самовыравнивание способствует стабилизации регулируемой величины в объекте.
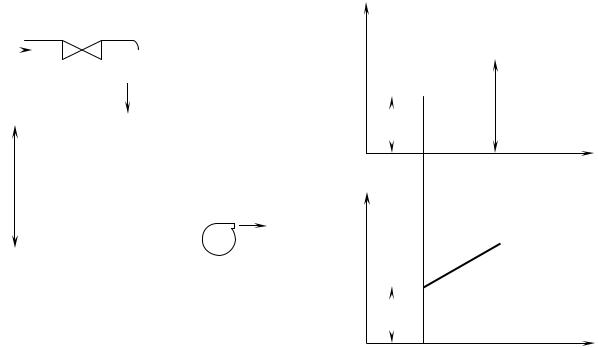
Астатическими называются объекты, не обладающие самовыравниванием. При отсутствии возмущающего воздействия астатический объект может находиться в состоянии равновесия при любых значениях регулируемой величины. При нарушении равновесия процесса скорость изменения регулируемой величины (скорость разгона) пропорциональна величине возмущающего воздействия.
Рассмотренный выше объект будет астатическим, если жидкость вытекает из бункера не самотёком, а откачивается насосом Н (рис. 1.11). Статическая характеристика у такого объекта практически отсутствует, а единственным показателем, характеризующим его свойства, будет скорость разгона.
Знание статических и динамических характеристик объекта необходимо при расчёте САР, при выборе регулятора и определении параметров его настройки.
а) |
y |
б) |
y |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
y1 |
||
x |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
t |
|||
|
|
|
|
|
|
|
|
|
H |
в) |
x |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1
t
16
Рис. 1.11. Пример астатического объекта:
а – схема объекта; б – вид ступенчатого воздействия; в – переходная характеристика
1.6. Основные требования к системам автоматического регулирования
Наряду с общеинженерными требованиями к САР, такими, как надёжность, простота конструкции, экономичность изготовления, к этим системам предъявляются специфические требования, основанные на особенностях систем автоматического регулирования, – наличие устойчивости и обеспечение заданных качественных показателей.
1.6.1. Устойчивость систем автоматического регулирования
Основное требование к САР состоит в том, что система должна быть устойчивой. Система автоматического регулирования называется устойчивой, если регулируемая величина, получившая отклонение от заданного значения под действием внешних возмущений, с течением времени в установившемся режиме становится равной заданному значению или близкому к нему с некоторой ошибкой.
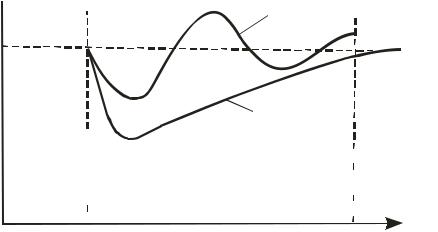
Объект регулирования находится под воздействием внешних возмущений; результат этих возмущений – отклонение регулируемой величины от заданного значения. Регулятор воспринимает это отклонение и воздействует на объект так, чтобы устранить появившееся отклонение регулируемой величины. В правильно созданной САР после появления отклонения регулируемая величина с течением времени принимает заданное значение или близкое к нему (рис. 1.12).
X 
1
x2 |
2
x1 











|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
||
|
|
|||
1 |
||||
t |
t |
|
||
Рис. 1.12. Характер изменения регулируемой величины во времени в устойчивой САР: 1 – апериодический сходящийся переходный процесс; 2 – колебательный процесс

17
Характер изменения регулируемой величины во времени (апериодический или колебательный) зависит от свойств объекта и регулятора. Кривая 1 рис. 1.12 может характеризовать, например, изменение уровня воды в барабане котла: до момента времени t1 уровень был равен заданному x2 , в момент t1 произошло скачкообразное потребление горячей воды, уровень упал до значения x1 , появилось отклонение уровня, регулятор стремится возвратить уровень воды к заданному значению или по экспоненте 1, или по кривой 2.
Рассмотренный процесс в САР с момента времени t1 до наступления установившегося значения t2 называют переходным, в устойчивых САР он всегда сходящийся.
В неустойчивых САР регулируемая величина с течением времени удаляется от своего заданного значения и переходный процесс носит расходящийся характер (рис. 1.13а).
б)
a) 
Рис. 1.13. Переходный процесс в неустойчивой САР:
1 – апериодический расходящийся; 2 – колебательный расходящийся; 3 – колебательный незатухающий
Переходный процесс в САР может иметь характер незатухающих колебаний с постоянной амплитудой (рис. 1.13б). Такие САР относят также к неустойчивым, и они не пригодны к эксплуатации.
1.6.2. Качество переходного процесса систем автоматического регулирования
Наличие устойчивости является необходимым, но не достаточным требованием к САР. Кроме устойчивости, САР должна обладать определёнными качественными показателями (характеристиками). К таким показателям качества САР относятся:

|
|
18 |
|
а) |
ε |
б) |
ε |
|
Рис. 1.14. Показатели качества переходного процесса регулирования:
а– апериодический переходный процесс, б – колебательный переходный процесс
-длительность переходного процесса в САР (на рис. 1.14 отрезок времени t0 − t1 ); в конкретных САР это время должно быть задано в зави-
симости от предъявляемых требований к технологическому процессу; - перерегулирование σ как разность между величиной первого от-
клонения и установившимся значением; выражается в процентах от установившегося значения:
σ= ymax - yуст ×100% ,
ууст
эта величина для большинства объектов не должна превышать 20%; - статическая ошибка САР – максимальное абсолютное остаточное отклонение ε , отнесённое к заданному значению регулируемой величи-
ны, выраженное в процентах:
δ= ε ×100% , yз
статическая ошибка для реальных систем не должна превышать 3 – 5 %;
- степень колебательности переходного процесса (определяется числом колебаний на отрезке времени t0 − t1 ) не должна превышать 1 – 5 колебаний.
1.7. Характеристики звеньев систем автоматического регулирования
В системах автоматического управления любая часть каждой из них может быть рассмотрена как звено системы, преобразующее сигнал входа в сигнал выхода. Звено системы управления – это математическая модель реального элемента или устройства. Если в качестве такого звена рассматривается объект регулирования, то входными сигналами будут
19
внешние возмущения и управляющие воздействия, а выходными – регулируемые величины. Если звенья системы автоматического регулирования считать однонаправленными, то передача и преобразование сигналов производится только в одном направлении.
При выборе элементов системы автоматического регулирования и её анализе необходимо знание статических и динамических характеристик отдельных звеньев.
Статическая характеристика звена системы автоматического регулирования, как было показано выше, – это зависимость выходной величины от входной в установившемся режиме. Установившийся режим характеризует состояние выходной величины по истечении переходного процесса в звене или системе. Знание статической характеристики позволяет оценить чувствительность элемента системы регулирования и предел изменения выходного параметра в зависимости от входного и выбрать соответствующие технические средства, реализующие тот или иной элемент системы регулирования.
Динамическая характеристика звена системы регулирования определяется его дифференциальным уравнением, которое описывает поведение звена в переходном режиме (с момента поступления входного сигнала до установившегося значения выходной величины). Дифференциальное уравнение звена выражает зависимость выходной величины y от входной x в функции времени.
Допуская упрощения в дифференциальном уравнении, можно с достаточной степенью приближения описать поведение в переходном режиме различных по своей физической природе элементов одинаковыми дифференциальными уравнениями. Таким образом, реальный физический элемент системы регулирования можно заменить его математической моделью, причём уравнения этого элемента и модели совпадают. В реальных системах получается сравнительно ограниченное число уравнений, описывающих типичные элементы систем регулирования (первичные преобразователи, усилители, исполнительные механизмы).
В теории линейных систем автоматического регулирования принято рассматривать типовые динамические звенья. Типовым динамическим звеном называют устройство, переходный процесс которого описывается линейным дифференциальным уравнением не выше второго порядка.
На практике при работе автоматических систем входная величина звена есть случайная функция времени. Так как любой сложный сигнал может быть представлен в виде суммы более простых сигналов, в теории автоматического регулирования используются следующие наиболее простые типовые входные сигналы: единичный скачок (ступенчатая функция), гармонический сигнал (гармоническая синусоидальная функция), импульсная функция. Чаще всего при изучении свойств системы автоматического регулирования рассматривают процесс, вызванный ступенчатым входным сигналом, например процесс регулирования при быстрой
20
перенастройке задающего устройства или пуске системы. Реакцию звена на ступенчатый входной сигнал называют переходной характеристикой.
Единичный импульс может быть получен как производная от ступенчатого сигнала и представляет собой импульс бесконечно малой длительности на входе звена. Реакцию звена на единичный импульс называ-
ют импульсной характеристикой.
Переходная и импульсная характеристики САР определяют свободные колебания системы. Их называют характеристиками регулирования. Реакция звена или системы регулирования на гармонический сигнал есть частотная характеристика. Она определяет вынужденные колебания звена или системы.
1.8. Дифференциальные уравнения и передаточные функции линейных звеньев и систем автоматического регулирования
Как указывалось выше, исследование системы автоматического регулирования сводится к анализу решений дифференциального уравнения системы. Заметим, что в дальнейшем будем рассматривать только линейные САР. При решении дифференциального уравнения в теории автоматического регулирования применяют так называемое преобразование Лапласа, позволяющее упростить процесс этого решения.
Вкачестве примера рассмотрим линейную систему автоматического
регулирования, которая подвергалась возмущающему входному воздействию, начиная с момента времени t = 0 . При этом в системе возникает переходный процесс, описываемый линейным дифференциальным уравнением n-го порядка (поэтому систему автоматического регулирования называют линейной).
Влевой части уравнения записываются выходные величины y и их
производные, в правой – |
входные величины x и их производные. |
|
|||||||||||||
C |
|
d n y(t ) |
+ C |
|
d n −1 y(t ) |
+ ... + C |
|
y(t ) = b |
d m x(t ) |
+ b |
d m −1x(t ) |
+ ... + b x(t ) |
|||
n |
|
|
n −1 |
|
|
0 |
|
|
|||||||
|
|
|
m |
dt m |
m −1 |
dt m −1 |
0 |
||||||||
|
|
dt n |
|
|
dt n −1 |
|
|
|
|
|
|||||
.
Преобразование Лапласа позволяет свести дифференциальное уравнение к алгебраическому. Оно преобразует функцию вещественного переменного x = f (t ) в функцию комплексного переменного X = f ( p), где
p = a + jb . |
|
|
|
|
|
||
Функция x(t ) называется оригиналом, а X (p) – |
изображением по |
||||||
Лапласу этого оригинала. |
|
|
d n x(t ) |
|
|||
Прямое преобразование Лапласа функции C |
запишем: |
||||||
dt n |
|
||||||
Cd n x(t ) |
|
|
|||||
= Cpn X ( p). |
|
||||||
L |
|
|
|
||||
|
|
||||||
dt n |
|
|
|
|
|
||