

10357
.pdf51
Недостаток гидравлических исполнительных механизмов – высокие требования к чистоте обработки сопрягаемых деталей и необходимость в гидронасосе.
Регулирующие органы предназначены для непосредственного воздействия на объект регулирования, чтобы устранить появившееся отклонение регулируемой величины от заданного значения. Регулирующие органы изменяют приток вещества или энергии и выполняются, как правило, в виде клапанов, задвижек, шиберов, заслонок. В системах автоматики регулирующие органы часто составляют с исполнительным механизмом единое целое. Главное требование к конструкции регулирующих органов – линейность их статической характеристики.
2.6. Автоматические электронные показывающие, регистрирующие и регулирующие приборы
Для целей измерения технологических параметров, а в отдельных случаях и для их регулирования, применяется большая группа показывающих, регистрирующих и регулирующих приборов – электронные вторичные приборы, входящие в состав Государственной системы приборов (ГСП). В соответствии с ГСП приняты блочный и модульный принцип построения приборов, полная взаимозаменяемость на основе высокой степени унификации, стандартизация габаритов.
2.6.1.Классификация автоматических электронных вторичных приборов
Внастоящее время приборостроительная промышленность выпускает в соответствии с ГСП несколько групп электронных вторичных приборов. Для автоматизации систем ТГВ наиболее часто применяют приборы групп КС-1, КС-2, КС-3, КС-4 и КВ-1. В группу приборов входят электронные потенциометры, мосты и приборы с индукционными датчиками (табл. 2.1).
Т а б л и ц а 2.1
Типы электронных вторичных приборов системы ГСП
Группа приборов |
Типы приборов и датчиков |
|
|
|
|
|
|
|
Погреш- |
||
потенцио- |
мосты |
индукционные |
|
|
Внешний вид |
||||||
и характеристика |
метры |
|
|
|
|
|
|
|
ность |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КСД-1 |
|
|
|
|
|
|
|
|
КС-1 |
КСП-1 |
КСМ-1 |
с дифферен- |
|
|
|
|
|
|
|
Изме- |
без записи |
с датчиком |
циально- |
|
|
|
|
|
|
|
||
размер прибора |
термопа- |
с терморе- |
трансформа- |
|
|
|
|
|
|
|
рения |
|
|
|
|
|
|
|
|||||
зистором |
|
|
|
|
|
|
|
0,5 % |
|||
160 × 200 × 500 |
рой |
торным дат- |
|
|
|
|
|
|
|
||
|
|
|
чиком |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

|
|
|
52 |
|
|
|
|
|
О к о н ч а н и е |
т а б л. 2.1 |
|
Группа приборов |
Типы приборов и датчиков |
По- |
|||
потенцио- |
|
Внешний вид |
греш- |
||
и характеристика |
|
||||
мосты |
индукционные |
ность |
|||
|
метры |
||||
|
|
|
|||
|
|
|
|
||
КС-2 |
|
|
КСД-2 |
|
|
ширина диа- |
КСП-2 |
КСМ-2 |
с дифферен- |
|
|
граммной лен- |
циально- |
|
|||
с термопа- |
с терморе- |
|
|||
ты 100 мм |
трансформа- |
|
|||
размер прибора |
рой |
зистором |
торным дат- |
изме- |
|
240 × 320 × 482 |
|
|
чиком |
рения |
|
|
|
|
КСД-3 |
0,5 % |
|
КС-3 |
|
|
запись |
||
|
|
с дифферен- |
|||
круглая шкала, |
КСП-3 |
КСМ-3 |
1 % |
||
циально- |
|||||
запись на бу- |
с термопа- |
с терморе- |
|
||
трансформа- |
|
||||
мажный диск |
рой |
зистором |
торным дат- |
|
|
250 мм |
|
|
чиком |
|
|
|
|
|
|
||
КС-4 |
|
|
КСД-4 |
|
|
|
|
с дифферен- |
изме- |
||
ширина диа- |
|
|
|||
КСП-4 |
КСМ-4 |
циально- |
рения |
||
граммной лен- |
|||||
с термопа- |
с терморе- |
трансформа- |
±0,25% |
||
ты 250 мм |
рой |
зистором |
торным дат- |
запись |
|
размер прибора |
|||||
|
|
чиком |
±0,5% |
||
400 × 400 × 367 |
|
|
|||
|
|
|
|
||
КВ-1 |
|
|
|
|
|
шкала – вра- |
|
|
КВД-1 |
|
|
щающийся ци- |
|
|
изме- |
||
|
|
с дифферен- |
|||
линдрический |
КВП-1 |
КВМ-1 |
рения |
||
циально- |
|||||
циферблат, пе- |
с термопа- |
с терморе- |
0,5 % |
||
трансформа- |
|||||
ремещается от- |
рой |
зистором |
запись |
||
носительно не- |
|
|
торным дат- |
1 % |
|
|
|
чиком |
|||
подвижного |
|
|
|
||
|
|
|
|
||
указателя |
|
|
|
|
|
Простейшие приборы входят в группу КС-1 и КП-1. В группу КС-1, КС-2, |
|||||
КС-3, КС-4 входят самопишущие приборы. В группу КВ-1 входят показываю- |
|||||
щие приборы. Отличительной особенностью группы приборов КВ-1 является |
|||||
то, что они имеют вращающийся цилиндрический циферблат, перемещающий- |
|||||
ся относительно неподвижного указателя. В некоторых модификациях ко входу |
|||||
электронного вторичного прибора через переключающее устройство, встроен- |
|||||
ное в прибор, могут подключаться несколько внешних датчиков (первичных |
|||||
преобразователей). Такой прибор называют многоточечным (многоканальным). |
|||||
Одноточечный (одноканальный) электронный вторичный прибор на входе име- |
|||||
ет лишь один датчик, переключающее устройство отсутствует. |
|
||||
53
Взависимости от того, какой сигнал – носитель информации – в приборе обрабатывается, приборы могут быть электрическими, пневматическими или гидравлическими. В строительной индустрии наиболее часто применяют электронные вторичные приборы, в которых сигнал, характеризующий технологический процесс, представлен в электрической форме.
Всостав электронного вторичного прибора входит усилитель и показывающее или пишущее устройство. Пишущее устройство представляет каретку с капиллярной трубкой, с помощью которой происходит запись характера контролируемого процесса на бумаге. Бумажная лента перемещается с помощью лентопротяжного механизма.
Вавтоматических системах наиболее широко применяются электронные вторичные приборы с одной из трёх измерительных схем: мостовой, компенсационной и дифференциально-трансформаторной.
Взависимости от вида измерительной схемы различают электронные мосты, электронные потенциометры и электронные вторичные приборы с диффе- ренциально-трансформаторными первичными преобразователями.
2.6.2. Электронные мосты
Электронные мосты предназначены для измерения и записи (иногда – для регулирования) любой электрической или неэлектрической величины, которая может быть преобразована в изменение электрического сопротивления датчика. Датчиком электронного моста может быть терморезистор, помещённый в объект контроля или регулирования, поэтому электронный мост с датчиком-термо- резистором применяется для измерения температуры.
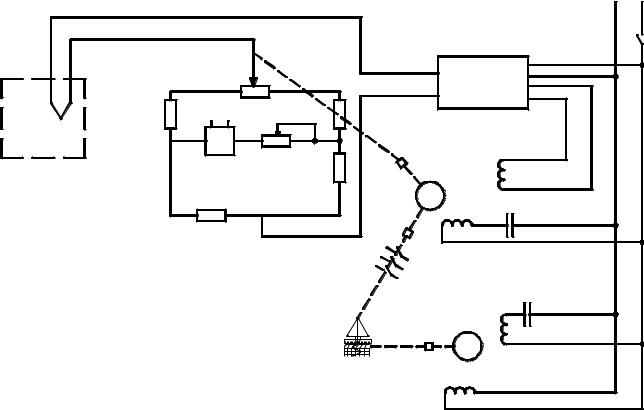
Мостовая измерительная схема прибора выполнена на резисторах R1, R2, RT, RP. К диагонали моста подводится напряжение u, с другой диагонали снимается сигнал разбаланса в виде напряжения определённого знака ± u и подаётся на усилитель (рис. 2.24). В качестве примера рассмотрен электронный мост КСМ-3.
При равновесии мостовой измерительной схемы соблюдается соотноше-
ние:
R1 × (Ra×b + R3 ) = (RT + Ra×c )× R2 ,
где R1, R2, R3 – резисторы с постоянными сопротивлениями мостовой схемы; RT – сопротивление терморезистора, помещённого в объект контроля;
Ra×b – сопротивление реохорда (переменного резистора) между точками a и
b;
Ra×c – сопротивление реохорда между точками a и c.
Сигнал разбаланса u при этом равен нулю. При отклонении температуры в объекте величина сопротивления терморезистора изменяется, равновесие моста нарушается, на входе усилителя появляется сигнал разбаланса u соответствующего знака. Этот сигнал усиливается усилителем и передаётся на обмотку 3-4 реверсивного двигателя РД-09. Вторая обмотка 1-2 двигателя питается через фазодвигающий конденсатор C от сети. Ротор двигателя начинает

54
вращаться и перемещает стрелку циферблатного указателя. Одновременно через жёсткую обратную связь (редуктор Р) приводится в движение движок реохорда RP в направлении уменьшения разбаланса u . При равенстве нулю напряжения u мостовая схема уравновесится, а стрелка циферблатного указателя покажет величину измеренной температуры.
C |
A |
R1 |
RT |
Объект |
контроля или |
регулирования |
a |
|
|
|
Сеть |
b |
|
|
|
~ 220 B |
|
|
|
|
|
RP |
|
|
|
|
R3 |
|
|
|
|
E |
+ |
|
|
S |
B |
u |
Усилитель |
||
|
- |
|
|
|
R2 |
|
|
|
|
D |
|
|
P |
3 |
|
|
|
||
|
|
|
РД-09 |
|
|
|
|
|
|
|
|
K3 |
|
4 |
|
|
|
|
|
|
|
K2 |
|
C |
|
K1 |
2 |
||
|
|
|
1 |
|
|
|
|
Блок регулирования |
|
Рис. 2.24. Принципиальная электрическая схема электронного моста
С помощью регулирующих контактов К1-К3, входящих в состав блока регулирования и связанных с валом двигателя РД-09, мост можно применять для регулирования температуры.
2.6.3. Электронные потенциометры
Электронные автоматические потенциометры применяются для измерения и записи изменяющихся напряжений постоянного тока или других величин, преобразованных в напряжение. Датчиком, работающим с этим прибором, может быть термопара, поэтому шкала прибора дополнительно градуируется в градусах.
В электронных автоматических потенциометрах применяется компенсационный принцип измерения. Упрощённая схема прибора представлена на рис. 2.25.
Измеряемое напряжение постоянного тока ux, поступающее, например с термопары, подводится к точке A мостовой измерительной схемы (резисторы
|
|
|
55 |
|
|
|
|
|
|
Rp, R1, R2, R4, R5, R6) и точке a усилителя У. На схеме ИСН – |
источник стабили- |
||||||||
зированного напряжения для формирования напряжения компенсации uK . |
|||||||||
Компенсационный принцип измерения заключается в том, что измеряемое |
|||||||||
напряжение ux сравнивается с компенсационным напряжением uK , снимаемым |
|||||||||
с диагонали АБ измерительной схемы. Если напряжение ux |
и uK |
не равны, их |
|||||||
разность ± |
u = ux − uK |
подаётся на вход электронного усилителя У. Поляр- |
|||||||
ность сигнала зависит от соотношения величин ux |
и uK . Разность ± |
u в уси- |
|||||||
лителе преобразуется в переменное напряжение частотой 50 Гц, усиливается и |
|||||||||
подаётся на управляющую обмотку 3-4 реверсивного двигателя РД-09. Ротор |
|||||||||
двигателя начинает вращаться и перемещает механически связанный с ним |
|||||||||
движок A реохорда Rp |
через редуктор Р1 до тех пор, пока сигнал на выходе |
||||||||
мостовой измерительной схемы не станет равным нулю. Одновременно через |
|||||||||
редуктор Р2 перемещается каретка показывающего и записывающего прибора. |
|||||||||
В момент равенства нулю сигнала на выходе мостовой измерительной схемы |
|||||||||
каретка со стрелкой останавливается на нужном делении шкалы. |
|
|
|||||||
|
|
|
|
|
|
|
|
|
Сеть |
|
|
|
|
|
|
|
|
|
~ 220 B |
|
|
|
|
|
|
|
|
|
S |
ux |
|
A |
Rp |
|
a |
У |
|
|
|
ТП |
|
R1 |
R4 |
R2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
объект |
|
|
|
|
|
|
|
|
|
контроля |
|
|
|
|
P1 |
|
3 |
|
|
|
|
ИСН |
|
|
|
|
|
|
|
|
|
|
R6 |
|
PД09 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
R5 |
|
|
|
|
4 |
C1 |
|
|
|
|
|
P2 |
|
2 |
|
||
|
|
|
|
1 |
|
|
|
||
|
|
|
Б |
K3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K2 |
|
|
|
|
|
|
|
|
|
K1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
C2 |
|
|
|
|
|
|
P3 |
СД09 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2.25. Принципиальная электрическая схема потенциометра |
|
|||||||
Для целей регулирования прибор может комплектоваться контактной системой К1-К3 (блок регулирования).
Для непрерывной записи измеряемой величины на бумажную ленту в приборе имеется лентопротяжный механизм, который приводится в движение синхронным электродвигателем СД-09 через редуктор Р3.

56
2.6.4.Электронные вторичные приборы
сдифференциально-трансформаторными датчиками
Электронные приборы этой группы применяются для измерения неэлектрических величин, которые могут быть преобразованы в перемещение мембраны или сильфона, а это перемещение преобразуется в напряжение соответствующей амплитуды и фазы дифференциально-трансформаторного датчика. Поэтому такими приборами в системах ТГВ измеряют давление жидкости или газа, расход жидкости или газа, уровень жидкости в зависимости от типа датчика. Электрическая схема прибора показана на рис. 2.26 (прибор типа КСД-3 с датчиком давления).
Рис. 2.26. Принципиальная электрическая схема электронного вторичного прибора с дифференциально-трансформаторным датчиком:
Д1 – дифференциально-трансформаторный датчик; Д2 – дифференциально-трансформатор- ные катушки вторичного прибора; У – электронный усилитель; РД – реверсивный двигатель; П – показывающее и записывающее устройство
Перемещение сердечника 1 в катушке датчика Д1 зависит от величины измеряемого параметра. Во вторичном приборе находится аналогичная катушка Д2, сердечник 2 которой при помощи профильного диска перемещается реверсивным двигателем РД. Первичные обмотки датчика Д1 и вторичного прибора Д2 соединены параллельно и получают питание от трансформатора в усилителе У. Вторичные обмотки включены встречно. В них индуктируются переменные напряжения, разности которых u1 и u2 образуют сигнал рассогласования u = u1 − u2 . Амплитуда и фаза сигнала зависят от положений сердечников относительно середины своих обмоток.
57
При рассогласованных положениях сердечников индуктированные во вторичных обмотках напряжения будут различны. Сигнал рассогласования u подаётся на усилитель, а затем на реверсивный двигатель. Двигатель вращается до момента, пока стрелка показывающего устройства остановится на цифре измеренного значения и эта разность не станет равной нулю. Каждому значению измеряемого параметра соответствует определённое положение сердечника и записывающей системы во вторичном приборе.
Чувствительным элементом первичного преобразователя, соединённым с сердечником датчика Д1, может быть поплавок для измерения уровня жидкости, мембрана дифференциального манометра, сильфон манометрического датчика температуры и другие устройства. В специальной комплектации прибора устанавливается блок регулирования с контактной системой К1-К3.
2.7. Релейно-контактная аппаратура
Во многих системах автоматического регулирования и управления систем ТГВ переключение отдельных цепей, их замыкание и размыкание выполняется с помощью электромеханических устройств: реле, контакторов, магнитных пускателей, автоматических воздушных выключателей. Автоматическое управление с применением реле, контакторов, магнитных пускателей, а также различных механических переключающих устройств называют релейно- контактным управлением. Замыкание или размыкание электрических цепей происходит в этом случае механическими контактами, которые приводятся в движение теми или иными способами.
Основу аппаратуры релейно-контактного управления составляют реле и контакторы. Применяются также магнитные пускатели – разновидности контакторов, а также автоматические воздушные выключатели – электромеханические устройства для нечастых включений и отключений электрических цепей и защиты их при коротких замыканиях и длительных перегрузках.
Электромагнитное реле – электромеханическое устройство, замыкающее или размыкающее электрические контакты под воздействием управляющего сигнала. Отечественной промышленностью выпускаются различные типы электромагнитных реле, отличающихся по конструкции, назначению и принципу действия.
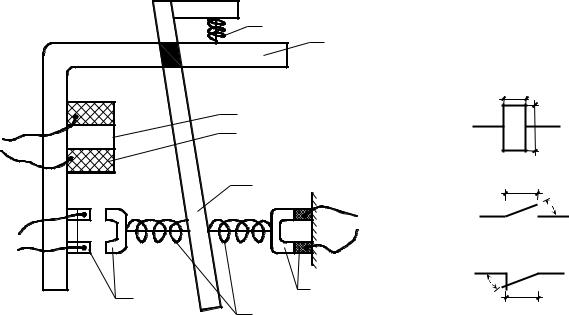
Электромагнитное реле состоит из сердечника 1 (рис. 2.27), катушки 2, якоря 3, кронштейна 4, замыкающих и размыкающих контактов 5 и 6 и возвратной пружины 7. Выводы 8 катушки реле и контактов 9 и 10 подсоединяются к соответствующим цепям управления. При протекании тока через обмотку 2 сердечник 1 намагничивается и притягивает якорь 3. Механическое движение якоря приводит к замыканию контакта 5 и размыканию контакта 6. В результате происходит замыкание или размыкание электрической цепи. Контакты реле замыкают или размыкают преимущественно цепи управления, где ток не превышает нескольких ампер. На схеме 11 – амортизирующие пружины.
В зависимости от времени срабатывания контактов различают реле мгно-
венного действия и реле с выдержкой времени. В реле мгновенного действия
58
контакты замыкаются (или размыкаются) практически сразу после поступления напряжения на катушку реле (или после исчезновения напряжения на катушке).
В реле с выдержкой времени контакты замыкаются или размыкаются не сразу после поступления на реле сигнала управления, а с некоторой выдержкой. Применение контактов реле с выдержкой времени вызвано практической необходимостью. Реле с выдержкой времени используются, например, при автоматическом управлении пуском асинхронных двигателей с фазным ротором в крановых механизмах, конвейерах и других случаях, где требуется создать выдержку времени, необходимую для работы того или иного механизма.
|
7 |
|
Условное |
обозна- |
|
|
|
чение обмотки реле |
|||
|
|
4 |
|||
|
|
в |
принципиальных |
||
|
|
|
|||
|
|
|
схемах |
|
|
|
|
|
|
6 |
|
|
1 |
|
|
|
|
|
2 |
|
|
|
12 |
8 |
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
Замыкающий контакт |
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
30º |
9 |
|
|
10 |
Размыкающий |
|
|
|
|
контакт |
||
|
|
|
|
||
5 |
|
6 |
|
30º |
|
11 |
|
|
|
||
|
|
|
6 |
|
|
Рис. 2.27. Конструкция электромагнитного реле
Наиболее простым способом выдержка времени (до 10-12 с) при отпускании реле может быть создана, например введением медной гильзы между обмоткой реле и сердечником. Выдержку времени можно создать и другими способами, например вводя часовой механизм в конструкцию реле. Такие реле на-
зываются маятниковыми реле времени.
Внекоторых типах реле времени имеется кулачковый распределительный валик, который приводится во вращение электродвигателем небольшой мощности. При вращении валика кулачковым механизмом замыкаются или размыкаются контакты в определённой последовательности через соответствующие промежутки времени. В таких реле выдержка времени может исчисляться от нескольких секунд до нескольких часов. Примером такой конструкции может быть электрический прибор КЭП-12, применяющийся при автоматизации, например вентиляционных установок.
Вотдельных случаях электромагнитные реле могут выполнять функцию защиты электроустановок.
59
Такую функцию выполняют реле максимального тока. Эти реле срабатывают при коротких замыканиях в электрических цепях и настраиваются на ток в обмотке реле, превышающий номинальный в 2-2,5…11 раз.
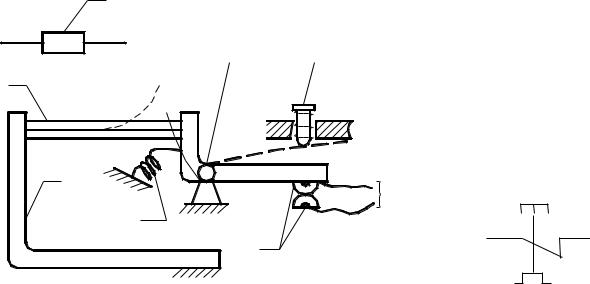
Для защиты электроустановок при длительных перегрузках применяются реле тепловые. Эти реле, в отличие от электромагнитных, катушек не имеют. В конструкцию теплового реле (рис. 2.28) входит нагревательный элемент (нихромовая пластина или отрезок нихромовой проволоки) 4, включаемый в цепь главного тока, биметаллическая пластина 1, представляющая продольный спай инваровой и стальной пластин, защёлка 2, контактная система 3, основание 6. Если в цепи нагревательного элемента ток длительно превышает номинальный на 20-25 %, то происходит нагревание этого элемента, биметаллическая пластина нагревается и за счёт различного коэффициента линейного расширения инвара и стали изгибается, освобождая защёлку. Контакты 3 под действием пружины 7 размыкаются, в результате происходит отключение электроустановки от питающей сети. После остывания нагревательного элемента и биметаллической пластины контакт теплового реле может быть возвращён в исходное рабочее состояние кнопкой возврата 5.
4
a)
2 |
|
5 |
1
6 |
б) |
|
|
|
в цепь |
7 |
управления |
|
3 |
Рис. 2.28. Конструкция теплового реле:
а – схема реле; б – условное обозначение контакта теплового реле в электрических схемах
Контактор – электромагнитный аппарат, предназначенный для замыкания и размыкания силовых цепей под нагрузкой. Под силовыми цепями, или цепями главного тока, понимаются цепи силовых потребителей. В таких цепях наблюдаются токи порядка десятков – сотен ампер. Контакторы не имеют принципиальных отличий при сравнении с электромагнитными реле. Контакторы имеют устройства дугогашения и более массивны по сравнению с электромагнитными реле.
Магнитный пускатель – это контактор с встроенными тепловыми реле, применяется для включения силовых цепей (главными контактами) и цепей

60
управления (вспомогательными контактами), а также для автоматической защиты электрических цепей при длительных перегрузках.
Автоматический воздушный выключатель (автомат) – это электромаг-
нитный аппарат не дистанционного действия со встроенными реле максимального тока или тепловыми реле, применяется для включения и отключения электрических цепей и автоматической защиты их при коротких замыканиях и длительных перегрузках.
2.8. Бесконтактные логические элементы
Развитие средств автоматического управления производственными процессами и возрастающие требования к устройствам автоматики привели к необходимости применения в них новых приборов и устройств, позволяющих решать задачи автоматического управления на более высоком уровне. К числу таких устройств относятся бесконтактные логические элементы, реализующие те или иные логические функции. Их применение в схемах автоматики вызвано тем, что при автоматическом управлении всевозможными технологическими процессами и машинами большинство выполняемых операций носит характер логических решений. Единичный простейший логический элемент реализует и простую логическую операцию.
Простейшую логическую функцию выполняют электромагнитные реле при замыкании или размыкании своего контакта. Логическая функция реле поясняется на рис. 2.29. Если на обмотку реле K подаётся управляющее напряжение uвх, которое можно считать входным сигналом x реле, то реле срабатывает и замыкает контакт K, в результате замыканием контакта вырабатывается сигнал выхода y в виде управляющего напряжения uвых. Замкнутое состояние контакта реле соответствует простейшей логической операции «Утверждение», называемой также операцией ДА (разрешение на включение). Размыкание контакта соответствует логической операции «Отрицание», или операции НЕ (запрет на включение устройства после размыкания контакта).
uвх = x
K
K: 1
y (uвых)
Рис. 2.29. Схема, поясняющая логическую функцию электромагнитного реле
Логическая операция ДА соответствует условно названному состоянию логической единицы (логическая 1), а логическая операция НЕ соответствует состоянию логического нуля (логический 0). Такие же состояния можно пере-