

9886
.pdf21
С этой целью была предложена теория “ следования за лидером”, являющаяся дальнейшим развитием упрощенных динамических моделей.
Первым и основным дифференциальным уравнением теории ” следования за лидером” является уравнение:
dV k |
= |
1 |
(V k + 1 − V k ) |
(24) |
|
|
|||
dt |
t p |
|
||
Полученное правило может быть сформулировано следующим образом: при следовании двух автомобилей друг за другом на достаточно близком расстоянии, когда сказывается их взаимное влияние, ускорение ведомого автомобиля прямо пропорционально разности скоростей ведущего и ведомого автомобилей. Экспериментальная проверка основного уравнения осуществлялась методом имитационного эксперимента с помощью двух автомобилей, оборудованных аппаратурой для измерения значений параметров уравнения. В результате дальнейших исследований было установлено, что при движении в плотном потоке действия водителя ведомого автомобиля обусловлены изменениями скорости лидирующего (ведущего) автомобиля и дистанции до него. С учетом неизбежного запаздывания реакции водителя основное уравнение теории “ следования за лидером” имеет следующий вид:
V k + 1 = V k + t p × |
dV k |
(25) |
|
dt |
|||
|
|
К макроскопическим моделям относят модели гидродинамической теории. Наиболее известны две из них, основанные на использовании аналогии в поведении транспортного потока и потока жидкости.
Первая основана на уравнении неразрывности, которое имеет следующий вид:
dq |
+ |
dN |
= 0 |
(26) |
|
dt |
dX |
||||
|
|
||||
|
|
|
Смысл этого уравнения следующий: количество автомобилей, входящих в момент dt на участок dX, равно количеству автомобилей, выходящих с этого участка. В результате преобразований и упрощений интенсивность транспортного потока определяется:
Na =Va × qa × ln(qmax / qa ) |
(27) |
где: Va – скорость, подлежащая экспериментальному определению; qa,max – плотность транспортного потока.
Вторая гидродинамическая модель использует понятие о потенциале давления жидкости и предполагает, что движение автомобиля выражается в виде функции некоторого “ потенциала давления”, зависящего от дорожных условий и психофизиологического состояния водителя. Дорожные условия оцениваются параметром F0, который определяется по наблюдениям за скоростями движения:
F0 = ln(4V0 − 2 V ) − ln V |
(28) |
где: V0 – скорость движения в свободных условиях;
V – снижение скорости на отдельных геометрических элементах.
22
3. Стохастические модели.
Исследованиями установлено, что для описания потоков сравнительно малой интенсивности, характеризующих вероятность проезда определенного числа транспортных средств через сечение дороги, применимо уравнение (распределение) Пуассона:
|
|
Р |
|
(t ) = |
(λ t )n |
× е − λ t |
(29) |
|
|
n |
|
||||
|
|
|
|
n! |
|||
|
|
|
|
|
|
||
где: Рn(t) – |
вероятность проезда n – го числа автомобилей за время t; |
||||||
λ - |
основной |
параметр распределения |
(интенсивность транспортного |
||||
|
потока), авт/сут; |
|
|||||
t – |
продолжительность наблюдений; |
|
|||||
n – |
число наблюдаемых автомобилей. |
|
|||||
Практически для целей управления движением более необходимо располагать данными о характере распределения временных интервалов между следующими друг за другом автомобилями. Если появление автомобилей характеризуется распределением (26), то интервалы между ними распределены по экспоненциальному
закону |
|
F (t ) = λ × е− λt |
(30) |
Следует отметить, что в транспортном потоке интервалы между автомобилями как минимум соответствуют длине типичного транспортного средства ( например 4-5 м для потока легковых автомобилей). Поэтому более правильным для описания распределения временных интервалов оказывается использование модели смещенного
экспоненциального закона |
|
F (t ) = λ × е− λ (t − l ) |
(31) |
где: l – временной интервал, соответствующий |
характерной длине |
транспортного средства.
Упомянутые модели дают удовлетворительную сходимость с натурными наблюдениями для однородных потоков, главным образом состоящих из легковых автомобилей. При смешанном потоке, а также воздействии некоторых внешних факторов распределение Пуассона не дает удовлетворительных результатов, и в этом случае может быть применено гамма-распределение Пирсона III типа или распределение Эрланга.
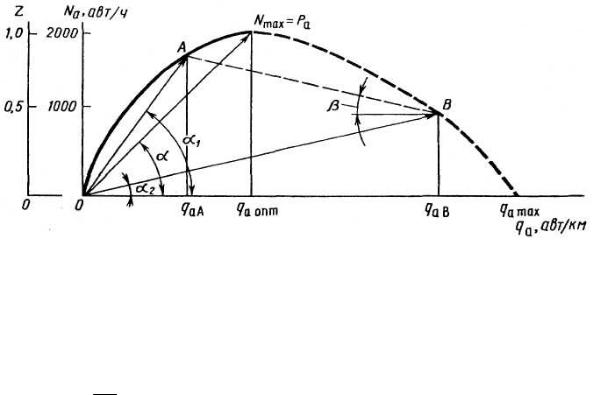
При анализе закономерностей дорожного движения, а также при решении практических задач регулирования возникает необходимость использования взаимозависимостей характеристик транспортного потока. Взаимосвязь интенсивности, скорости и плотности потока на одной полосе дороги графически может быть изображена в виде так называемой основной диаграммы транспортного
потока Na=Va×qa (рис.5).
23
Рис.5 Основная диаграмма транспортного потока.
В точках О и qmax интенсивность движения равна 0, т.е. соответственно или на дороге нет транспортных средств, или поток находится в состоянии затора (неподвижен).
Радиус-вектор, проведенный из точки О в направлении любой точки на кривой ( например А или В), характеризующей Na, определяет значение средней скорости
потока Va = N a = tgα .
qa
Главное значение графика заключается в том, что по нему прослеживается важнейшая зависимость, характеризующая безопасный транспортный поток – по мере роста плотности потока падает скорость.
Левая часть кривой (сплошная линия) отображает устойчивое состояние потока, при котором по мере возрастания плотности транспортный поток проходит фазы свободного, частично связанного и наконец связанного состояния. Правая часть ( пунктирная линия) характеризует неустойчивое состояние потока, приближающегося
к заторовому состоянию. Угол наклона радиуса-вектора в точке А: α=600 (tg=1,77) V=67 км/ч, а в точке В: α=150 (tg=0,26) V=9,9 км/ч.
Необходимо, однако, отметить, что основная диаграмма не может отразить всю сложность процессов, происходящих в транспортном потоке, и характеризует его лишь при однородном составе и нормальном состоянии дороги и внешней среды.
24
ЛЕКЦИЯ №4
Тема: Методические основы организации дорожного движения.
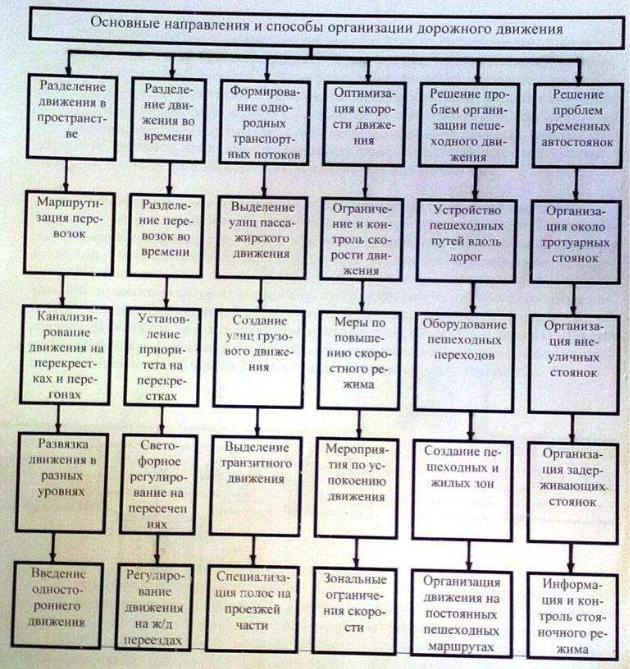
1. Основные направления и способы организации дорожного движения.
По мере развития автомобилизации накапливался опыт обеспечения безопасности, эффективности и удобства дорожного движения в городах и на автомобильных дорогах методами ОДД с применением соответствующих технических средств. Все разработки различных методов организации движения имеют тесную взаимосвязь и даже взаимопроникновение. Можно выделить шесть наиболее значимых методических направлений и по каждому из них привести наиболее типичные способы реализации (рис. 6).
При анализе блок-схемы (рис.6) необходимо также обратить внимание, что на практике методы и способы организации дорожного движения, выделенные как самостоятельные, в ряде случаев настолько взаимосвязаны, что воспринимаются как единое мероприятие.

25
2. Разделение движения в пространстве.
В самом общем виде разделение движения в пространстве предопределяет пропорциональное развитие УДС по мере развития автомобильного парка. Это позволяет обеспечить достаточную площадь проезжей части дорог для рассредоточения автомобилей в пространстве во время движения. Одним из способов решения этой задачи является канализирование движения, которое заключается в направлении транспортных потоков по наиболее благоприятной и безопасной траектории с помощью технических средств.
а) Канализирование на перекрестках предполагает прежде всего разделение встречных потоков, чтобы ликвидировать самые опасные по тяжести конфликтные точки встречного столкновения, а также разделение движения по полосам попутного направления. Средством канализирования на перегонах является устройство разделительных полос на широких дорогах с установкой на них ограждений. Для выделения полос основным стационарным средством является дорожная разметка, которая позволяет упорядочить движение, сформировать ряды, что способствует повышению общей пропускной способности дороги и безопасности движения.
б) Канализирование в зоне перекрестков направлено на сокращение числа и опасности конфликтных точек за счет направления потоков по наиболее благоприятной и безопасной траектории. Кроме этого канализирование облегчает ориентировку и повышает четкость взаимодействия водителей на сложных по конфигурации пересечениях. Выполняется с помощью дорожной разметки или возвышающихся островков, преимуществом которых является их лучшая видимость в неблагоприятные погодные условия. Островки служат не только для защиты пешеходов на переходах через проезжую часть, но и для размещения технических средств и их защиты. Для того, чтобы выполнять функцию реальной защиты, островок должен возвышаться на проезжей частью не менее чем на 35 см и иметь соответствующую прочность.
Рис.7 Схема канализирования перекрестка.
1- островок для защиты пешеходов и установки колонки с дорожным знаком; 2- направляющий островок; 3 – “ карман” для защиты автомобилей, ожидающих возможность повернуть налево; 4 – островок безопасности для пешеходов.
Направляющие островки также воздействуют на скорость движения, принудительно снижая ее при сужении проезжей части в зоне островков. Обобщая выше сказанное, можно перечислить следующие задачи, которые могут быть решены канализированием движения:
∙ разделение попутных и встречных потоков;
26
∙резервирование лишней ширины проезжей части;
∙обеспечение правильного исходного и конечного положений автомобилей при выполнении маневра на перекрестке;
∙защита транспортного средства, ожидающего возможности выполнения маневра;
∙выделение (обозначение) путей для движения пешеходов;
∙защита пешеходов и технических средств организации движения (светофорных колонок, маячков, стоек дорожных знаков и пр.);
∙принудительное снижение скорости автомобилей в отдельных местах.
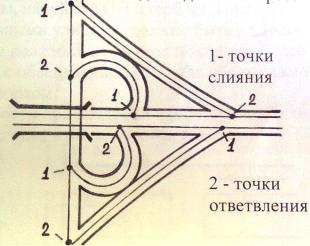
в) Развязка движения в разных уровнях способствует наиболее полному сокращению конфликтов между пешеходным движением и транспортными потоками. Однако, следует отметить, что развязки в разных уровнях не ликвидируют полностью конфликты между транспортными потоками, так как сохраняется опасность конфликтов отклонения и слияния транспортных потоков в местах съезда с одной из пересекающихся магистралей и въезда на другую.
Современные транспортные развязки требуют тщательно продуманной системы информации участников движения.
При ее отсутствии дисциплинированные водители, попадая на неправильное направление, вынуждены совершать многокилометровые перепробеги. Недисциплинированные водители в таких условиях совершают опасные маневры, приводящие к возникновению ДТП.
Продуманная система маршрутного ориентирования позволяет не только помочь водителям четко ориентироваться и избегать ошибок в выборе направления движения, но и дает возможность в определенных масштабах перераспределить транспортные потоки по УДС.
г) Односторонне движение впервые было применено в г. Филадельфия ( США) в 1906 г., а в 1907 г. введено в Нью-Йорке.
Главное достоинство применения одностороннего движения заключается в сокращении числа конфликтных точек и прежде всего в устранении конфликта встречных транспортных потоков (см. табл. 1).

27
Показате |
|
Двустороннее движение |
|
Одностороннее движение |
|
||||||
ли |
пересече |
|
слияния |
ответвле |
|
всего |
пересече |
слияния |
ответвле |
|
всего |
|
ния |
|
|
ния |
|
|
ния |
|
ния |
|
|
число |
|
|
|
|
|
|
|
|
|
|
|
конфлик |
16 |
|
8 |
8 |
|
32 |
4 |
8 |
8 |
|
20 |
тных |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
точек |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
К преимуществам одностороннего движения следует также отнести:
∙возможность более рационального использования полос проезжей части и осуществления принципа выравнивания состава потоков на каждой из них (специализация полос);
∙резкое улучшение условий координации светофорного регулирования между пересечениями;
∙облегчение условий перехода пешеходами проезжей части в результате четкого координированного регулирования и упрощения их ориентировки, в виду отсутствия встречных потоков;
∙повышение безопасности движения в темное время суток вследствие отсутствия ослепления водителей светом фар встречных транспортных средств;
∙повышение скорости транспортных потоков и увеличение пропускной
способности улиц.
Существуют следующие варианты одностороннего движения: полное постоянное; полное временное; неполное (частичное); реверсивное.
Оптимальным условием организации одностороннего движения является наличие прямоугольной схемы планировки УДС, характеризующейся наличием параллельно расположенных магистралей и отсутствием ярко выраженного центра. Эта схема встречается в некоторых городах страны, например С- Петербург, Новосибирск, Ростов-на-Дону. Расстояние между параллельными улицами должно быть не более 350 м, а соединительные поперечные проезды должны быть на расстоянии не более 200 м. Эти условия главным образом связаны с обеспечением удобства обслуживания населения маршрутным пассажирским транспортом.
Обязательным для обеспечения безопасности при введении одностороннего движения является четкая и полная информация с помощью дорожных знаков.
Обеспечение такой информации в равной степени необходимо при всех перечисленных вариантах одностороннего движения. При переменном и полном временном вариантах приходится прибегать к переносным или управляемым многопозиционным знакам.
Реверсивное одностороннее движение целесообразно организовывать для транспортных потоков определенного направления в установленные часы или даже дни недели. Примером таких условий являются магистрали, ведущие в административные центры городов, по которым в утренний час пик происходит массовое прибытие автомобилей, а по окончании рабочего дня массовый выезд.

28
3. Разделение движения во времени.
Это направление ОДД охватывает методы, обеспечивающие в основном с помощью Правил дорожного движения, дорожных знаков и светофоров разделение транспортных и пешеходных потоков во времени, Благодаря этому исключаются (сводятся к минимуму) конфликты при проезде перекрестков, ж/д переездов, узких мест.
3.1 Установление приоритета на нерегулируемых перекрестках.
∙Установление приоритета во времени на перекрестке с помощью Правил дорожного движения является наиболее универсальным случаем, когда водитель, исполняя существующие требования, самостоятельно организовывают движение. Существует ряд положений Правил, устанавливающих очередность проезда перекрестков, например:
На пересечении равнозначных дорог приоритетом на движение обладает транспортное средство не имеюее помехи справа (см. п. 13.11. ПДД). При повороте налево или развороте Правила обязывают уступить дорогу транспортным средствам, движущимся по равнозначной дороге со встречного направления прямо или направо (см. п. 13.12. ПДД).
Существует также общее правило, требующее от водителей транспортных средств, поворачивающих на перекрестке направо или налево, уступать дорогу пешеходам, которые переходят проезжую часть той дороги, в сторону которой совершается поворот.
Упомянутые правила разделения движения можно отнести к локальным, так как они реализуются на отдельных перекрестках или относительно коротких участках.
∙ Введение приоритета на перекрестках с помощью дорожных знаков приоритета (2.1-2.7). При этом возможны следующие ситуации:
а) На перекрестке неравнозначных дорог транспортное средство движущееся по дороге, обозначенной знаками 2.1, 2.3.1, 2.3.2, 2.3.3 имеет преимущество проезда по отношению к водителям , находящимся на пересекаемых дорогах. При этом знаки 2.4 “ Уступите дорогу” и 2.5 “ движение без остановки запрещено” требуют от водителей предоставить предоставить право первоочередного проезда, транспортным средствам находящимся на пересекаемой дороге.

29
б) В случае, когда главная дорога на перекрестке меняет направление, водители, движущиеся по главной дороге, должны руководствоваться между собой правилами проезда перекрестков равнозначных дорог. Этими же правилами должны руководствоваться водители, движущиеся по второстепенным дорогам.
Таким образом, обеспечивается разделение движения во времени при проезде конфликтных точек.
Попеременное движения в местах сужения проезжей части при относительно невысокой интенсивности движения обеспечивают знаками 2.6 “ Преимущество встречного движения” и 2.7 “ Преимущество перед встречным движением”, которые выполняют роль светофора.
3.2 Светофорное регулирование движения.
Предназначено для попеременного пропуска транспортных потоков по взаимно конфликтующим направлениям. Прежде всего это относится к перекресткам с высокой интенсивностью и сложной конфигурации, где только с помощью знаков и разметки нельзя обеспечить безопасность движения. Практика организации дорожного движения выработала критерии введения светофорной сигнализации, учитывающие суммарные задержки и степень опасности движения. Условия, при которых необходима установка светофоров на перекрестках, приведены в ГОСТ 23457-86 “ технические средства организации дорожного движения. Правила применения.” Светофорное регулирование широко используется для обеспечения должной безопасности движения на железнодорожных пересечениях, а также безопасного перехода пешеходов через проезжую часть в пределах перекрестка и за его пределами (вблизи школ, торговых центров, кинотеатров, других мест массового посещения ). Характерным примером разделения движения во времени является регулирование на реверсивной полосе – полосе проезжей части, используемой для попеременного движения во встречных направлениях.
Во всех случаях, когда используется светофорная сигнализация, может быть применено и ручное регулирование с помощью сигналов, подаваемых сотрудниками ГИБДД. Следует отметить, что ручное регулирование применяется лишь в течение какого-то ограниченного времени (на период выхода из строя светофорной сигнализации, возникновения непредвиденных заторов и для пропуска транспортных средств в зоне ДТП).
30
3.3 Распределение перевозок во времени
По мере развития автомобилизации возникают систематические заторы в связи с перегрузкой УДС. Основные организационные мероприятия выхода из данной ситуации:
∙плановое распределение определенных видов перевозок во времени суток или запрет движения отдельных видов транспортных средств в определенные периоды;
∙Запрещение в городах или некоторых их зонах перевозок особо тяжелыми и тяжелыми грузовыми автомобилями в дневное время суток (период наиболее высокой интенсивности движения транспортных потоков);
∙сокращение интенсивности движения маршрутного пассажирского транспорта, путем рассредоточения пассажиропотока за счет назначения различного времени начала и окончания рабочего дня в близкорасположенных
крупных предприятиях и учреждениях.
Одним из примеров применения крайней меры в условиях особого обострения транспортной проблемы является решение властей столицы Мексики г. Мехико. В 1989 г. в связи с глобальными систематическими заторами на УДС, сводящими на нет пользование легковыми автомобилями, установлено, что владельцы автомобилей с четными номерами могут ездить в черте города в четные дни, а с нечетными номерами в нечетные дни.
3.4 Регулирование движения на железнодорожных переездах.
Железнодорожные переезды требуют самого пристального внимания службы организации дорожного движения. Основной задачей является разделение движения ж/д составов и транспортных потоков во времени и снижение задержек движения на переезде.
Для обеспечения безопасности все переезды оборудуются соответствующими средствами сигнализации, информации и контроля. Безопасность и наибольшая пропускная способность автотранспорта на ж/д переезде обеспечивается следующими условиями:
∙достаточным расстоянием видимости переезда для водителей и машинистов локомотивов;
∙ровностью дороги и настила на подходах и непосредственно на пересечении рельсовых путей при необходимом коэффициенте сцепления;
∙достаточной шириной полосы движения и числом полос на переезде;
∙устройством обособленных дорожек для движения пешеходов;
∙наличием и исправностью предупредительной информации и сигнализации на переезде (дорожных знаков, светофоров, шлагбаумов, звуковой сигнализации);
∙соблюдение водителями (п. 15 ПДД ) и пешеходами установленных Правил
движения по ж/д переездам.
Условия видимости на переезде обеспечиваются правильным расположением пересечения и достаточным удалением объектов, ухудшающих видимость (рис. 8).