

9117
.pdf41
Рис. 2.29. Схема углового датчика: 1 – корпус датчика; 2 – фланец; 3 – катушки;
4 – |
шарикоподшипники; 5 – преобразователь сигнала; 6 – ось вращения; 7 - коромысло; |
8 – |
демпферы (груз); 9 - экран |
Рис. 2.30. Схема датчика высоты: 1- вал (ось вращения углового манипулятора); 2 – шарикоподшипники; 3 – корпус; 4 – экран; 5 – катушки; 6 – кожух; 7 – патрон; 8 – крышка; 9 - опора крепления датчика
Датчики продольного уклона (высоты) монтируются на выносных травер-
сах при помощи регулировочного шпинделя слева и (или) справа от асфальто-
укладчика на уровне шнека за внешней гранью скользящей опалубки. Техниче-
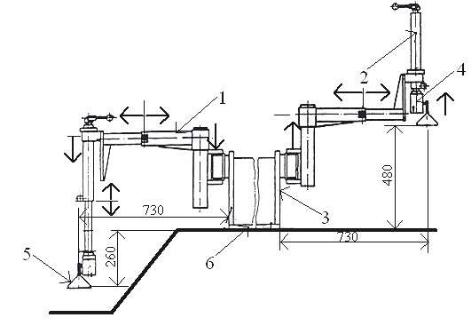
ские возможности монтажного оборудования при установке датчиков высоты приведены на рис. 2.31.
42
Рис. 2.31. Монтажная схема установки датчиков высоты: 1 – траверса; 2 – регулировочный шпиндель; 3 – боковой щит; 4 – датчик; 5 – угловой манипулятор; 6 – основание выглаживающей плиты
Датчик поперечного уклона (угловой) размещают на раме над шнековой камерой асфальтоукладчика. Опорная площадка под датчик крепится к траверсе через резиновые амортизаторы, гасящие вибрацию от плиты. При транспорти-
ровке их затягивают винтами, а перед началом работы ослабляют.
Регуляторы представляют собой электронные блоки, с помощью которых можно задавать поперечный уклон или высоту плиты, чувствительность всей си-
стемы и вести сравнение сигналов. Изначально задающими устройствами дела-
ются установки, равные сигналам датчиков при требуемом уклоне и толщине укладываемого слоя. Импульсы, посылаемые с блока, непрерывно сопоставляют-
ся в сравнивающем устройстве с фактическим сигналом, поступающим от датчи-
ка. Во время работы асфальтоукладчика щуповой и угловой датчики следят за положением рабочего органа, которое зависит от ровности основания. При изме-
нении этого положения датчики подают в сравнивающее устройство измененный сигнал. Его величина будет больше (меньше) сигнала задающего устройства.
Разность сигналов является регулирующим воздействием в цепи электромагнита гидрораспределителя, управляющего работой нивелировочных цилиндров. Про-
изведенное изменение высоты концов тяговых брусьев полностью соответствует
43
стабилизации положения плиты. Концы лонжеронов будут менять свою высоту до тех пор, пока щуп или коромысло датчиков не займут свое первоначальное положение, при котором исчезает сигнал рассогласования.
На некоторых моделях следящих систем, например, электронной автомати-
ки нивелирования типа «Grade - Line», регуляторы встроены непосредственно в считывающие устройства.
Адаптер служит для подачи напряжения питания от асфальтоукладчика к регуляторам, а также усиления выходного сигнала и последующей его передачи по цепи.
Ровность укладываемого слоя зависит от расположения датчика высоты по отношению к рабочему органу. Ранее отмечалось, что оптимальным для обеспе-
чения стабильно высокого качества поверхности является позиционирование датчика на уровне оси шнека. Любое другое расположение следящего устройства
(в створе середины плиты, отражательного щита или задней стенки укладчика)
может приводить к искажению профиля и появлению дефектов по ровности.
В зависимости от вида эталонной поверхности в качестве чувствительного элемента в датчиках высоты применяют различного рода угловые манипуляторы.
При слежении за копирной струной нашли широкое распространение ма-
нипуляторы в виде трубы– щупа, посаженные на ось датчика высоты (рис. 2.32).
В случае слежения за поверхностью бортового камня или свежеуложенного асфальтобетонного слоя считывающими устройствами являются датчики с мани-
пулятором типа лыжа– щуп. Следует отметить, что применение этой конструкции оправдано только при обеспеченной ровности эталонной плоскости, т.е. основа-
ния. В данном случае щуп вторым концом шарнирно крепится к металлическому стержню либо к профильному листу, выполненным в форме лыжи. При движе-
нии асфальтоукладчика лыжа, скользя по базовой поверхности, задает контроль-
ный уровень для рабочего органа.

44
Рис. 2.32.Слежение за копирной струной: 1- угловой манипулятор (труба-щуп); 2 – датчик высоты; 3 – струна (трос)
По своей конструкции лыжи бывают двух типов: короткобазовые с длиной опорной поверхности от 30 до 90 см и длиннобазовые – с диной до 9 м. Во вто-
ром случае для обеспечения поперечной жесткости лыжу по концам дополни-
тельно крепят к раме асфальтоукладчика с помощью шарнира. Типичные приме-
ры следящих устройств в виде лыжи приведены на рис. 2.33.
Длиннобазовые конструкции считаются наиболее надежными с точки зре-
ния обеспечения ровности, поскольку контролируют профиль эталонной поверх-
ности на участке большей длины, что позволяет нивелировать мелкие дефекты.
Другим вариантом длиннобазовых следящих устройств являются различного ро-
да шарнирно-сочлененные конструкции, такие как: полужесткие трубы, «плава-
ющие» и многоопорные балки.

45
Рис. 2.33. Слежение за базовой поверхностью с помощью лыжи: 1 – металлический стержень; 2 – лыжа
Полужесткие трубчатые конструкции (рис. 2.34), используемые в каче-
стве подвижного уровня, представляют собой многозвенную трубу длиной 6, 9
или 12 м с шарнирным соединением элементов. В целях сглаживания неровно-
стей ремонтируемого участка поверх трубы на ее центральном участке дополни-
тельно натянута струна, являющаяся базовой поверхностью для щупа датчика высоты. Провисание струны регулируется с помощью механического натяжите-
ля.
«Плавающая» балка – это одноили многопролетная конструкция из ме-
таллического профиля, состоящая также из отдельных шарнирно-соединенных между собой элементов (рис. 2.35). В качестве опорных частей по концам каждо-
го пролета здесь используются башмаки из износостойкого материала. Эталон-
ной плоскостью для датчика со щупом является верхняя грань звена балки, рас-
положенного напротив шнековой камеры.

46
Рис. 2.34. Подвижная трубчатая конструкция: 1 – металлическая труба; 2 – струна; 3 - датчик со щупом; 4 – шарнир; 5 – натяжитель; 6 – крепление к раме
Рис. 2.35. Подвижная «плавающая» балка: 1 – многопролетная балка; 2 – опорный башмак; 3 - шарнир
47
Многоопорная балка (рис. 2.36) представляет собой деревянную конструк-
цию рамного типа, передняя часть которой располагается в пределах базы уклад-
чика, а задняя – позади него. При этом считывание эталонной поверхности ведет-
ся в пределах ремонтируемого участка с корректировкой ровности по вновь уло-
женному слою. Крепление рамы к шасси укладчика осуществляется посредством шарнира, что позволяет ей балансировать в вертикальной плоскости в соответ-
ствии с изменением продольного профиля основания. По концам к раме при-
креплены две многоопорных ходовых тележки. В качестве опорных частей на них могут использоваться либо сдвоенные колесные пары, либо башмаки (до 16
штук с каждой стороны укладчика). Общая поперечная устойчивость рамы обес-
печивается за счет жесткого крепления тележек к шасси асфальтоукладчика. По своей сути такая конструкция является аналогом длиннобазовой лыжи, позволя-
ющей с высокой степенью точности контролировать ровность укладываемого слоя.
В качестве профилактических мер по техническому обслуживанию элек-
тронной системы автоматики нивелирования рекомендуется периодически про-
изводить: своевременную замену электрических ламп, проверку кабелей на нали-
чие механических повреждений, чистку разъемов, смазку поверхности опорных башмаков, лыж, щупов и т. п. дизельным топливом.
Датчики с угловыми манипуляторами, как, впрочем, и другие указанные выше трущиеся элементы системы контроля ровности, обладают одним суще-
ственным недостатком – они подвержены механическому износу. Более прогрес-
сивным способом слежения за базовой поверхностью в бесконтактном режиме является применение ультразвуковых датчиков типа «Digi – Sonic» или «Sonic – Ski».
Их принципиальное отличие заключается в количестве излучателей. В пер-
вом случае на датчике установлен 1 излучательный элемент, а во втором - 5. На асфальтоукладчиках датчики первого типа чаще всего используют при контроле системы подачи смеси в шнековую камеру. В следящих системах контроля ров-
ности наибольшее распространение получил второй вариант.

48
Рис. 2.36. Подвижная многоопорная балка: 1 – рама многоопорной балки; 2 – ходовая тележка; 3 – сдвоенная колесная опора; 4 – шарнир; 5 – датчик со щупом; 6 – крепление тележек к шасси

49
Датчик «Sonic – Ski» (рис. 2.37) может отслеживать как положение поверх-
ности асфальтобетона, так и копирной струны. При работе с копиром на трос настраивают один из пяти излучателей, обычно центральный, устанавливая дат-
чик перпендикулярно или под углом к струне. При работе с поверхностью ас-
фальтобетона датчик размещают параллельно оси движения укладчика с одно-
временным учетом сигналов от всех 5 излучателей.
Рис. 2.37. Ультразвуковые датчики: 1- датчик «Sonic – Ski»; 2 – датчик «Digi – Sonic»; а) – слежение за копирной струной; б) – слежение за поверхностью асфальтобетона
В данном случае считывающая система по своему принципу работы сопо-
ставима с короткобазовой лыжей. Монтаж датчиков «Sonic – Ski» осуществляет-
ся аналогично датчикам типа ДЩБ. Датчики «Digi – Sonic» крепятся на переднем кронштейне слева и справа от боковых щитов с разворотом их в сторону шнеко-
вой камеры.
50
3. Подготовка асфальтоукладочного комплекса к работе
3.1. Установка копирных струн
Копирные струны служат базовой поверхностью для работы автоматизиро-
ванных систем обеспечения ровности (задания курса) и последующей настройки или регулировки положения рабочих органов укладчика. Точность и тщатель-
ность установки струн является одним из главных условий обеспечения качества работ.
Датчики слежения за курсом имеют аналогичную конструкцию и принцип работы, что и датчик высоты. Разница заключается в позиционировании их на машине: щуп датчика высоты располагают горизонтально по отношению к струне, а датчика курса – вертикально или под углом. Однако на асфальтоуклад-
чиках они практически не применяются. Для слежения за направлением движе-
ния укладчика используют, главным образом, выносные штанги или консоли с закрепленными на них указателями (рис. 3.1). Управление курсом оператор осу-
ществляет вручную, следя за положением указателя по отношению к струне (или другому ориентиру). Вертикальная плоскость струны и указателя при правиль-
ном направлении движения машины должны совпадать (касаться друг друга).
Консоли устанавливают в передней части справа или слева по ходу движения ас-
фальтоукладчика.
Установку копирных струн ведут в следующей последовательности. До начала работ восстанавливают ось дороги с разбивкой, выноской и закреплением пикетажа. При этом струны могут устанавливаться с одной или с обеих сторон дороги. Все работы выполняются бригадой из 5 человек. Базой для планового и высотного положения струны являются нивелирные колышки, размещенные на расстоянии 15-17 м друг от друга (рис. 3.2). При этом линия верха колышков должна быть строго параллельна кромке будущего покрытия и соответствовать его толщине.