

9058
.pdf60
трехпозиционных дискретных системах выходной сигнал может принимать три значения: –1, 0, +1, т. е. «меньше», «норма», «больше». Качество работы таких САР выше, хотя их надежность ниже.
Регуляторы с линейным законом регулирования по математической зави-
симости между входными и выходными сигналами подразделяются на следу-
ющие виды:
–пропорциональные (П-регуляторы);
–интегральные (И-регуляторы);
–пропорционально-интегральные (ПИ-регуляторы);
–пропорционально-дифференциальные (ПД-регуляторы);
–пропорционально-интегрально-дифференциальные (ПИД-регуляторы).
В зависимости от вида используемой энергии регуляторы подразделяются на электрические (электромеханические, электронные), пневматические, гид-
равлические и комбинированные.
В СКВ в основном применяются электрические регуляторы. Пневматиче-
ские и гидравлические регуляторы, как правило, применяются во взрыво- и по-
жароопасных зонах.
7.3 Показатели качества работы систем автоматического регулирования
Задача системы автоматического регулирования – устойчиво поддержи-
вать заданное значение регулируемой величины в зависимости от внешних воз-
действий или изменять ее по определенной программе.
Под устойчивостью системы понимается способность возвращаться к состоянию установившегося равновесия после устранения возмущения, нару-
шившего указанное равновесие. Большинство систем имеют ограниченную устойчивость, т. е. система устойчива, если нагрузка не выходит за допустимые пределы.
В САР понятие устойчивости хорошо иллюстрируется реакцией системы на возмущающее или задающее воздействие.
61
При этом процесс должен отвечать наилучшему соотношению следую-
щих характеристик:
–интенсивное затухание переходного процесса;
–наименьшее значение максимального отклонения регулируемой вели-
чины;
– минимальная продолжительность переходного процесса.
Кроме устойчивости, любая САР должна обеспечить определенные каче-
ственные показатели процесса регулирования. Качество процесса регулирова-
ния обычно оценивается по переходной характеристике h(t) по отношению к возмущающему воздействию.
Переходная характеристика системы отражает процесс изменения регу-
лируемой переменной во времени, возникший вследствие воздействия на объ-
ект регулирования внешних факторов, и стремление регулятора ликвидировать возникшее рассогласование. Таким образом, переходная характеристика – это график перехода во времени из одного установившегося состояния в другое при строго определенной величине возмущающих или задающих воздействий.
В реальных системах возмущающие воздействия изменяется во времени произвольно. Однако для изучения поведения системы в процессе регулирова-
ния используют три характерных вида возмущающих воздействий: ступенча-
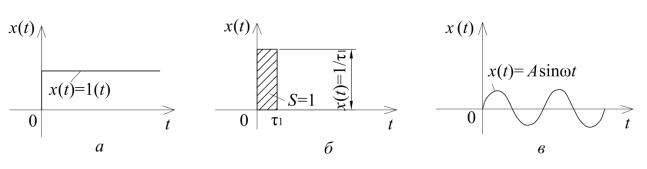
тое, импульсное и синусоидальное (рис. 5).
Рис. 5. Типовые виды возмущающих воздействий: а – ступенчатое; б – импульсное; в – синусоидальное.
Ступенчатое воздействие в определенный момент времени (например, t = 0) изменяется скачком от нуля до x(t) = 1 и остается на этом уровне (рис. 5, а).
Ступенчатую функцию, у которой величина скачка равна 1, называют единич-
62
ной и обозначают 1(t). Значению x = 1 соответствует увеличение нагрузки в 2
раза. Ступенчатое воздействие применяют для испытаний систем, но часто оно встречается и в действительных условиях (например, включили и оставили освещение в холодильной камере).
Импульсное воздействие создается на короткий промежуток времени
(рис. 5, б). Если продолжительность импульса составляет τ1, а амплитуда его равна 1/τ1; то такую импульсную функцию называют единичной (площадь равна
1). В практике воздействие на систему, близкое к импульсному, встречается очень часто (кратковременное открывание двери в холодильной камере, крат-
ковременное открывание жалюзи и т. п.).
Синусоидальное воздействие изменяется по закону синусоиды (рис. 5, в).
Примером такой нагрузки могут служить теплопритоки через ограждения в по-
мещение, так как температура наружного воздуха в течение суток изменяется примерно по синусоидальному закону.
Для изучения свойств системы (переходной характеристики) обычно применяют ступенчатую нагрузку. Зная реакцию системы на ступенчатую нагрузку, можно определить процесс регулирования и при других типах нагрузки, так как с некоторым приближением переменную нагрузку на не-
больших участках можно заменить ступенчатой.
Основными показателями качества регулирования являются:
–установившаяся ошибка;
–время регулирования;
–перерегулирование;
–колебательность процесса.
Кроме того, в качестве косвенных оценок применяют некоторые величи-
ны, в той или иной степени характеризующие отдельные особенности переход-
ного процесса.
Статическая (установившаяся) ошибка стат или точность регулирования определяется как разность двух значений регулируемой величины – устано-
вившегося после окончания переходного процесса Yуст и заданного Yзад.
63
стат Yуст Yзад , |
(24) |
В зависимости от величины статической ошибки САР соответственно подразделяют на статические ( стат > 0) и астатические ( стат = 0).
Динамическая ошибка дин – максимальная разность между текущим зна-
чением регулируемой величины и Yзад за время переходного процесса.
Пользуясь переходной характеристикой системы, вызванной единичным ступенчатым возмущающим воздействием, сформулируем основные параметры качества регулирования.
Временем регулирования tр называется время, в течение которого, начиная с момента приложения воздействия на систему, отклонение значений регулиру-
емой величины y(t) от ее установившегося значения y(t) = y(∞) будет меньше наперед заданного значения 0. Время регулирования определяет быстродей-
ствие переходного процесса. Обычно время регулирования отсчитывают с мо-
мента возникновения возмущающего воздействия до момента, когда отличие регулируемого параметра от заданной величины составляет не более ±5 %. Ес-
ли заданная величина равна нулю, то берут ±5 % от величины динамической ошибки.
Перерегулированием δ называется максимальное отклонение регулируе-
мой величины Ymax от установившегося значения Yуст, выраженное в процентах по отношению к Yуст. По сути это динамическая ошибка, отнесенная к номи-
нальной величине регулируемого параметра.
Колебательность системы характеризуется числом колебаний ре-
гулируемой величины за время регулирования tр. Если за это время переходной процесс в системе совершит число колебаний меньше заданного, то считается,
что система имеет требуемое качество регулирования в части ее колебательности.
Для оценки колебательности в ряде случаев удобно пользоваться показа-
телем степени затухания, который показывает, на сколько уменьшается ампли-
туда колебаний выходного сигнала системы за один период колебаний
|
n n 1 100 %. |
(25) |
|
n |
|
64
Для характеристики затухания процесса регулирования также применяют показатель, называемый декрементом затухания
|
n |
|
|
|
D ln |
. |
(26) |
||
|
||||
|
n 1 |
|
||
Часто пользуются интегрированным показателем качества.
Для определения его величины вычисляют интеграл изменения вы-
ходного сигнала системы за период времени регулирования
tр |
|
I [y(t)]2dt. |
(27) |
0 |
|
Этот показатель учитывает, как динамическую и статистическую ошибки,
так и время регулирования. Чем они меньше, тем меньше величина интеграла I
ивыше качество работы САР.
8.МЕТОДЫ АНАЛИЗА СИСТЕМ АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ
При создании САР вентиляции и кондиционирования воздуха необходи-
мо знать переходные характеристики как определенных элементов СКВ, так и системы в целом. Только по переходным характеристикам можно оптимально выбрать регулятор, датчики, исполнительные механизмы и построить САР.
Длительное время в технике кондиционирования использовались методы физи-
ческого моделирования, основанные на изучении того или иного процесса, вос-
производимого в разных масштабах. Физическое моделирование имеет высо-
кую степень достоверности и наглядности. Однако небольшой допустимый диапазон варьирования параметров и высокая стоимость ограничивают этот метод.
Более широко используются методы математического моделирования,
когда создаются математические описания, отражающие взаимосвязь входных и выходных параметров объекта.
65
Следует отметить, что математические модели представляют систему дифференциальных уравнений, решение которых значительно упрощается при использовании операционного исчисления.
СКВ представляют сложную динамическую систему, поэтому описание связей между основными переменными должно отражать как установившиеся во времени процессы (статический режим), так и переходные процессы от од-
ного состояния к другому (динамический режим).
В теории автоматического регулирования обычно используют 6-7 основ-
ных уравнений взаимосвязи входных и выходных сигналов (передаточных функций). Эти модели называют типовыми динамическими звеньями (ТДЗ). Пе-
редаточные функции типовых динамических звеньев описываются как в функ-
ции времени (оригинал), так и в функции оператора Лапласа (изображение).
8.1Характеристики типовых динамических звеньев
1.Апериодическое (инерционное, статическое) звено.
Уравнение взаимосвязи между входным и выходным сигналами во вре-
мени имеет вид:
T |
dy(t) |
y t kx t . |
(28) |
|
dt |
||||
|
|
|
Физический смысл коэффициентов T и k будет рассмотрен далее.
Переходная характеристика апериодического звена есть экспонента со следующим свойством. Если к любой точке экспоненты провести касательную,
а затем точку касания и точку пересечения касательной с асимптотой (линия, к
которой стремится экспонента) спроецировать на ось времени, то получим все-
гда один и тот же отрезок. Этот отрезок называют «постоянной времени», ко-
торая численно равна коэффициенту T в передаточной функции. Ордината ам-
плитуды экспоненты равна коэффициенту k.
Примером реализации апериодического звена может служить процесс ре-
гулирования уровня воды в баке с одновременной подачей воды Q1 (возмуща-
66
ющее воздействие) и расходом воды Q2. При единичном скачке Q1 уровень H
(регулируемый параметр) начинает повышаться, увеличивая гидростатическое давление. Сначала Q2 возрастает, а затем уровень H стабилизируется (экспонен-
та приближается к асимптоте). Эта способность звена (объекта) восстанавли-
вать равновесие называется самовыравниванием, которое качественно опреде-
ляется коэффициентом, равным 1/k, где k – коэффициент в передаточной функ-
ции апериодического звена. Часто это звено называют также статическим или
инерционным первого порядка.
2. Интегрирующее (астатическое) звено.
Переходная характеристика этого звена – прямая линия с углом наклона
= arctg 1/T. Коэффициент T в передаточной функции астатического звена определяется как T = 1/tg = arctg .
Пример интегрирующего звена – бак с притоком Q1 и постоянным расхо-
дом воды Q2 при регулируемом параметре H. Равновесие (постоянство уровня)
возможно только при Q1 = Q2. В остальных случаях будет непрерывное напол-
нение или опорожнение по типовой кривой разгона. Такие объекты называют
астатическими объектами. Они не обладают свойствами самовыравнивания.
|
3. Колебательное звено второго порядка. |
|
|
|
Это звено характеризуется тем, что оно становится колебательным только |
||
при определенном соотношении коэффициентов T1 |
и T2 в исходном типовом |
||
дифференциальном уравнении. |
|
||
|
Если T 2 |
4T , то система ведет себя как |
колебательное звено, при |
|
2 |
1 |
|
T 2 |
4T – как апериодическое звено второго порядка. Вид кривой разгона поз- |
||
2 |
1 |
|
|
воляет считать такое звено самовыравнивающимся, т. е. способным самостоя-
тельно восстанавливать равновесие после нанесения возмущающего воздей-
ствия. Пример такого звена – система из двух баков, где регулирующий пара-
метр Y – уровень воды H2 во втором баке. По графику разгона легко определя-
ется коэффициент k. Что касается коэффициентов T1 и T2, то их определение несколько сложнее.
67
4. Пропорциональное (усилительное, безынерционное) звено.
КЧХ такого звена не зависит от изменения частоты со, поэтому годограф вектора КЧХ превращается в точку, находящуюся на действительной положи-
тельной полуоси на расстоянии к от начала координат. Это звено мгновенно
(без инерции) реагирует на возмущающее воздействие. Коэффициент пропор-
циональности к (ордината выходного сигнала на кривой разгона) иногда еще называют коэффициентом усиления звена.
5. Дифференцирующее звено имеет два подтипа: идеальное и реальное.
Конец вектора КЧХ идеального дифференцирующего звена из начала ко-
ординат перемещается по положительной линии полуоси, уходя в бесконеч-
ность при = . Переходная характеристика при этом выглядит, как мгновен-
ный импульс с бесконечной амплитудой. Примером реализации идеального дифференцирующего звена может быть электрическая цепь, состоящая из кон-
денсатора С и сопротивления R со сверхпроводимостью (R = 0). Реально в та-
кой цепи (R ≠ 0). АФХ – полуокружность в первом квадранте комплексной плоскости с диаметром, равным k/T0, а кривая разгона – своеобразный импульс.
Амплитуда этого импульса в момент подачи «единичного скачка» мгновенно увеличивается до величины k/T0, а затем по экспоненте приближается к нулю.
Таким образом, коэффициенты T0 и k в передаточной функции легко находятся по кривой разгона.
6. Запаздывающее звено (чистое или транспортное запаздывание).
Примером реализации такого звена может служить ленточный транспор-
тер длиной l, перемещающийся со скоростью v с потоком сырья Q1 на входе и
Q2 на выходе. Естественно, при скачкообразном единичном изменении Q1 такое же изменение Q2 мы получим только через время τзап = l/v. Следовательно, вы-
ходной сигнал запаздывающего звена повторяет сигнал со сдвигом на время за-
паздывания τзап. Графиком АФХ запаздывающего звена будет бесконечное чис-
ло окружностей радиусом 1 вокруг начала координат комплексной плоскости.
При этом первая окружность замкнется при частоте ω = 2π∙τзап.
68
Представив систему в виде отдельных типовых звеньев, с помощью про-
стых математических вычислений можно получить передаточную функцию не
только объекта, но и всей САР.
8.2Типовые законы регулирования и их реализация
8.2.1Пропорциональные регуляторы
Взависимости от задающего воздействия и параметров объекта регули-
рования подбирают регулятор с определенным видом Wp. Изменение Wp адек-
ватно ведет к изменению коэффициентов дифференциального уравнения обще-
го передаточного звена (регулятор-объект) и тем самым достигается необходи-
мое качество регулирования. В промышленных регуляторах эти величины называются параметрами настройки. Параметрами настройки могут быть: ко-
эффициент усиления, зона нечувствительности, постоянная времени интегри-
рования, постоянная времени дифференцирования и т. д. Для изменения пара-
метров настройки в регуляторах имеются органы настройки (управления).
Кроме органов настройки основных параметров, регуляторы имеют также органы настройки, косвенно влияющие на эти коэффициенты или режимы его работы, например, органы настройки, изменяющие чувствительность регулято-
ра, демпфирование входного сигнала и др.
Регуляторы, имеющие один параметр настройки – коэффициент передачи kр, называются пропорциональными (П-регуляторы).
Переходные процессы в П-регуляторе описываются выражением:
kр , |
(29) |
где ε – входное воздействие на регулятор, равное отклонению регулируемой величины от заданного значения; μ – воздействие регулятора на объект,
направленное на ликвидацию отклонения регулируемой величины от заданного значения.
69
Выходным сигналом регулятора может быть напряжение в определенном диапазоне (например, постоянное напряжение в диапазоне от 0 до 10 В), ток 0-
20 мА и т. д.
Диапазон изменения выходного сигнала называется диапазоном регули-
рования. Диапазон изменения сигнала ошибки называют пропорциональным диапазоном.
ВП-регуляторах имеется возможность изменять диапазон регулирования
ипропорциональный диапазон.
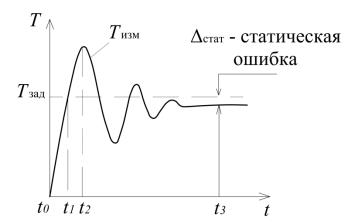
При больших значениях kр в контуре регулирования могут возникнуть колебания (рис. 6). Так, на примере автоматизации водяного калорифера, если во время включения системы температура воздуха Tизм ниже температуры воз-
духа Tзад, устройство управления выдает большой сигнал на открытие треххо-
дового клапана. Температура водяного калорифера и приточного воздуха начнет повышаться.
Рис. 6. Переходный процесс при пропорциональном регулировании.
Когда температура приточного воздуха после водяного калорифера до-
стигает Tзад, устройство управления выдает команду на закрытие трехходового клапана (рис. 6, точка t1).
Однако из-за того, что калорифер разогрет, температура приточного воз-
духа до времени t2 еще будет расти, а затем начнет снижаться. Этот процесс имеет вид затухающих колебаний, и через определенное время t3 процесс ста-
билизируется.