

6807
.pdf
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Окончание табл. 3.1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
S |
|
|
|
= |
|
|
∑( xi )2 N (N −1) |
= |
, |
|
|
|
|
|
x= tP,N S |
|
|
= |
, |
|
|
|
|||||||||||||||||||||||||||||||||
x |
x |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
= |
|
|
|
x2 +θ2x |
= |
, |
|
|
|
x = |
|
|
|
± |
|
|
= |
|
|
|
|
|
, P = %, N = |
|||||||||||||||||||||||||
|
|
|
|
x |
|
|
x |
x |
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
y↑i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
= , Ry=y↑N – y↑1= |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
yi+1 – yi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
UP, N Ry = |
||||||||||||||||||||||||
|
yi = yi – |
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ΣΔyi =0 |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
(Δyi)2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Σ(Δyi)2 = |
|||||||||||||||||||||||||
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
y= tP, N S |
|
|
= |
|
|
|
|
|
|
|
|
|||||||||||||
|
S |
|
|
|
∑( yi )2 N (N −1) |
, |
|
|
|
|
|
|
, |
|
|
|
||||||||||||||||||||||||||||||||||||||||
y |
|
|
|
y |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
= |
|
y2 + θ2y |
= |
, |
|
|
|
|
y = |
|
± |
|
= |
|
|
, P = %, N = |
|||||||||||||||||||||||||||||||
|
|
|
|
y |
|
|
|
|
y |
y |
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|||
|
|
|
|
= f ( |
|
|
|
, |
|
|
|
) = |
|
, f = |
|
(ax |
|
|
)2 + (ay |
|
)2 + (az |
|
)2 |
|||||||||||||||||||||||||||||||||
|
f |
x |
y |
|
x |
y |
z |
|||||||||||||||||||||||||||||||||||||||||||||||||
|
f = |
|
± |
|
|
|
= |
, P = %, N = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
f |
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В качестве примера обработки данных косвенных измерений методом переноса погрешностей рассмотрим эксперимент по определению ускорения свободного падения g по 5 измерениям периода колебания математического маятника T = 2π
 l
l g и его длины l. Выражая g через период колебаний и
g и его длины l. Выражая g через период колебаний и
длину, получим: g = 4π2l T 2 . Результаты расчетов будут иметь вид табл. 3.2.
T 2 . Результаты расчетов будут иметь вид табл. 3.2.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 3.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
li , м |
|
|
|
|
0.782 |
0.810 |
|
0.795 |
|
|
0.801 |
|
|
0.787 |
θl = 5.10– 4 м |
|||||||||||||||||||
Тi, с |
|
|
|
|
1.776 |
1.798 |
|
1.789 |
|
|
1.794 |
|
|
1.780 |
θT = 10– 4 c |
|||||||||||||||||||
l↑i |
|
|
|
|
0.782 |
0.787 |
|
0.795 |
|
|
0.801 |
|
|
0.810 |
Rl = l↑ N – l ↑1 = 0.028, |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l = 0.795 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
li+1–l i |
|
|
|
|
0.005 |
|
|
|
0.008 |
|
|
|
|
|
0.006 |
|
|
0.009 |
|
|
UP, N Rl = |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= 0.64. 0.028 = 0.018 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
–0.013 |
|
0.015 |
|
0 |
|
|
|
|
|
0.006 |
|
|
|
–0.008 |
|
|
ΣΔli = 0 |
||||||||
li = li |
– l |
|
|
|
|
|
|
|||||||||||||||||||||||||||
(Δli)2 |
|
|
|
|
169·10– 6 |
|
|
225·10– 6 |
|
0 |
|
|
|
|
36·10– 6 |
|
|
64·10– 6 |
|
|
Σ(Δli)2 = 494·10– 6 |
|||||||||||||
Sl = |
|
|
|
|
|
|
|
|
|
|
= 0.00497 , |
|
|
l= tP, N Sl = 0.013915 , |
|
|
|
|
|
|
||||||||||||||
∑( |
li )2 N (N −1) |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
= |
|
|
|
|
l = |
|
± |
|
|
= 0.795 ± 0.014 м, P = 95 %, N = 5 |
||||||||||||||||||||||
|
|
|
l 2 + θ2 |
= 0.013925, |
|
|
|
|||||||||||||||||||||||||||
l |
l |
l |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
T↑i |
|
|
|
|
1.776 |
|
1.780 |
|
1.789 |
|
|
1.794 |
|
|
1.798 |
|
|
|
RT=T↑N –T ↑1=0.022, |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T =1.7874 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Ti+1–T i |
|
|
|
|
0.004 |
|
0.009 |
|
|
|
|
|
0.005 |
|
|
0.004 |
|
|
|
UP, N RT =0.0141 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
39 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Окончание табл. 3.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Ti= Ti – T |
|
–0.0114 |
0.0106 |
0.0016 |
|
0.0066 |
–0.0074 |
ΣΔTi=0 |
|||||||||||||||
(ΔTi)2 |
|
|
|
|
1.300·10– 4 |
1.124·10– 4 |
2.56·10– 6 |
|
|
4.356·10– 5 |
5.476·10– 5 |
Σ(ΔTi)2=3.432·10– 4 |
|||||||||||
|
|
|
= |
|
|
|
|
|
|
|
|
= 0.004142, T = tP, N S |
|
= 0.011516, |
|
||||||||
S |
|
|
∑( |
|
Ti )2 |
N (N −1) |
|
|
|||||||||||||||
T |
T |
|
|||||||||||||||||||||
|
|
|
= |
|
|
|
= 0.011517, |
T = |
|
± |
|
|
= 1.787 ± 0.012 c , P = 95 %, N = 5 |
||||||||||
|
|
|
|
|
T 2 + θ2 |
|
|
|
|
||||||||||||||
|
T |
T |
T |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g = g(l,T ) = 4π2 l T 2 = 9.82388.
T 2 = 9.82388.
Для определения погрешности используем метод полного дифференциала.
|
|
|
|
|
|
|
|
|
a = |
dg |
|
= |
4π2 |
, |
|
|
|
|
a = |
dg |
= −2 |
4π2 |
l |
|
; |
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dl |
|
T |
2 |
|
|
|
|
|
|
|
|
|
dT |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
4π |
2 |
|
|
|
8π |
2 |
|
|
|
|
|
|
π |
|
2 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|||||||||||
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
g = (al l ) |
+ (aT |
T ) |
|
|
|
l |
|
|
|
4 |
|
l |
|
|
|
|
|
l |
2 T |
||||||||||||||||||||||||||||||||||||
|
|
= |
|
|
|
|
|
l |
+ |
|
|
|
T |
= |
|
|
|
|
|
|
|
|
|
+ |
|
= 0.2136, |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
T |
3 |
|
|
|
|
|
|
2 |
|
|
|
|
|
l |
T |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|||||||||||||||||||
g= 9.8 ± 0.2 м/ с2 , P = 95 %, N = 5 .
3.4.Алгоритм обработки данных косвенных измерений
выборочным методом
Выборочный метод применяется в том случае, если совместно измеренные значения аргументов функции xi, yi и zi не образуют выборок, но можно создать выборку значений функции {fi}.
1.По каждому набору совместно измеренных значений аргументов рассчитать значения функции fi = f(xi, yi, zi).
2.Обработать полученную выборку {fi} согласно алгоритму обработки
данных прямых измерений, находя среднее значение f и случайную погрешность f функции.
3. Вывести выражения для частных производных от функции
|
ax (x, y, z) = |
df (x, y, z) |
, ay (x, y, z) = |
df (x, y, z) |
, az (x, y, z) = |
df (x, y, z) |
|
|
||||||||
|
|
|
|
|||||||||||||
|
|
|
dx |
|
|
|
|
|
dy |
|
|
|
|
dz |
||
или для легко логарифмируемой функции f – |
от ее логарифма |
|
|
|
||||||||||||
b (x, y, z) = |
d ln f (x, y, z) |
, b |
y |
(x, y, z) = |
d ln f (x, y, z) |
, b (x, y, z) = |
d ln f (x, y, z) |
. |
||||||||
|
|
|
||||||||||||||
x |
|
|
dx |
|
|
|
|
dy |
|
|
z |
dz |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
4. По каждому набору совместно измеренных значений аргументов и их приборных погрешностей рассчитать приборную погрешность функции
40

θ fi = ax (xi , yi , zi ) θxi + ay (xi , yi , zi ) θ yi + az (xi , yi , zi ) θzi ,
предполагается, что приборные погрешности измеряемых величин могут быть разными в разных опытах или, если f имеет удобный для логарифмирования вид, по эквивалентной формуле
θ fi = fi ( bx (xi , yi , zi ) θxi + by (xi , yi , zi ) θ yi + bz (xi , yi , zi ) θzi ),
где fi – соответствующее данному набору аргументов значение функции (не путать со строкой таблицы упорядоченных по возрастанию значений f↑i).
5. Если приборные погрешности аргументов одинаковы во всех опытах или при нахождении максимальных по всей серии опытов значений приборных погрешностей θx = max θxi , θ y = max θ yi , θz = max θzi , для определения
приборной погрешности величины f |
можно использовать выражение |
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
θ f = |
|
|
xθx + |
|
yθ y + |
|
zθz , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
a |
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
= |
1 |
|
|
|
|
|
|
|
|
(x , y , z ) |
|
, |
|
y = |
1 |
|
|
|
|
|
(x , y , z ) |
|
, |
|
|
|
= |
1 |
|
|
|
(x , y , z ) |
|
. |
||||||||||
где ax |
|
|
|
|
a |
|
|
a |
|
|
a |
|
|
|
az |
|
a |
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
N ∑ |
|
N ∑ |
|
|
|
∑ |
|
||||||||||||||||||||||||||||||||||||||||
|
6. |
|
|
|
|
|
x |
i |
i i |
|
|
|
|
|
|
|
y |
i i i |
|
|
|
|
|
|
|
N |
|
z |
i |
i i |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
Вычислить |
среднюю |
приборную |
погрешность |
функции |
|||||||||||||||||||||||||||||||||||||||||
|
|
|
1 |
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
θ f |
= |
|
∑ |
|
θ fi |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
N i=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
f + θ f . |
|
|
|
||||||||
|
7. |
|
Вычислить полную погрешность функции |
|
|
f |
|
|
|
|
|||||||||||||||||||||||||||||||||||||
8.Записать результат измерения и округлить его.
9.Свести результаты обработки эксперимента в табл. 3.3.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 3.3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
θxi |
|
|
|
|
|
|
|
|
θx = max θxi = |
||||||||
yi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
θyi |
|
|
|
|
|
|
|
|
θy = max θyi = |
||||||||
fi |
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
||
|
|
|
|
|
|
|
|
f |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
f↑i |
|
|
|
|
|
|
|
|
Rf = f↑N – f↑1 = |
||||||||
Ufi = fi+1 – f i |
|
|
|
|
|
|
|
|
Ufi < UP, N Rf = |
||||||||
fi = fi – f |
|
|
|
|
|
|
|
|
ΣΔfi = 0 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
(Δfi)2 |
|
|
|
|
|
|
|
|
Σ(Δfi)2 = |
||||||||
θfi |
|
|
|
|
|
|
|
|
θ f = (∑ |
|
θ fi |
|
) N = |
||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
41 |
|
|
|
|
|
|
|
|
|
||||

Окончание табл. 3.3
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
= ∑( fi )2 N (N −1) = |
, f = tP, N S |
|
= |
, fβ = βP, N R f = |
, |
|||||||||
f |
f |
||||||||||||||||
|
f ≈ |
fβ |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
= |
|
f + θ f = |
, |
|
f = |
|
± |
|
= |
, P = ....%, N = ... |
|
||
|
|
|
f |
|
f |
f |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
В качестве |
примера |
обработки данных косвенных измерений |
|||||||||
выборочным методом рассмотрим эксперимент по определению ускорения свободного падения g по совместным измерениям периода колебания математического маятника T = 2π
 l
l g и его длины l. Тогда g = 4π2l
g и его длины l. Тогда g = 4π2l T 2 . Результаты расчетов могут быть представлены в виде табл. 3.4.
T 2 . Результаты расчетов могут быть представлены в виде табл. 3.4.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 3.4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
li , м |
0.5 |
0.6 |
0.7 |
|
|
0.8 |
|
0.9 |
θl = max θl i = 5·10– 4 м |
|||||||||
Тi, с |
1.415 |
1.563 |
1.670 |
|
|
1.791 |
|
1.910 |
θT = max θT i = 10– 4 c |
|||||||||
gi |
9.859 |
9.696 |
9.909 |
|
|
9.846 |
|
9.739 |
|
|
= 9.8098 |
|
|
|||||
|
g |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
g↑i |
9.696 |
9.739 |
9.846 |
|
|
9.859 |
|
9.909 |
Rg= g↑N – g↑1= 0.213 |
|||||||||
Ufi=gi+1–g i |
0.043 |
|
0.107 |
|
|
0.013 |
|
0.05 |
Ugi <UP, N Rg= 0.136 |
|||||||||
|
|
|
0.049 |
0.114 |
0.099 |
|
|
0.036 |
|
0.07 |
ΣΔgi= 0 |
|||||||
gi= gi – g |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
(Δgi)2 |
2.385× |
13.00× |
9.819 × |
|
1.309 × |
|
4.945× |
Σ(Δgi)2 = 0.003141 |
||||||||||
|
|
|
×10 –3 |
×10 –3 |
×10 –3 |
|
× .10–3 |
×10 –2 |
|
|
|
|
|
|
|
|||
θgi |
11.0 × |
9.321 × |
8.264 × |
|
7.253 × |
|
6.43 × |
θg = (∑ |
|
θgi |
|
) N = 0.0085 |
||||||
|
|
|
||||||||||||||||
|
|
|
×10 –3 |
×10 –3 |
×10 –3 |
|
×10 –3 |
×10 –3 |
|
|
|
|
|
|
|
|||
Для определения приборной погрешности используем метод логариф-
мирования функции. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
ln g(l,T ) = ln (4π2 ) + ln l − 2lnT ; b = |
d ln g |
= |
1 |
, b |
= |
|
d ln g |
= − |
2 |
; |
||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
dl |
|
|
l |
T |
|
|
|
dT |
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
θ |
|
|
2θ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
∑( gi )2 |
[N (N −1)] = 0.03963, |
||||||||||||||||||||
θgi = gi |
|
l |
+ |
|
T |
|
|
; S |
|
= |
||||||||||||||||
|
|
|
|
g |
||||||||||||||||||||||
|
|
|||||||||||||||||||||||||
|
|
|
|
li |
|
|
Ti |
|
|
|
i |
|
|
|
|
|
|
|
|
= |
g + θg = 0.119, |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
g = tP, N S |
|
= 0.11016, |
gβ = βP, N R f = 0.109, |
g ≈ |
|
gβ , |
|
|
||||||||||||||||||
|
|
|
g |
|||||||||||||||||||||||
g |
|
|||||||||||||||||||||||||
g= 9.81 ± 0.12 м/ с2 , P = 95 %, N = 5.
3.5.Контрольные вопросы
1.В каких случаях при обработке данных косвенных измерений применяют метод переноса погрешностей, а в каких – метод выборки?
42
2.Как определить по исходным данным, является ли набор значений выборкой случайной величины или последовательностью, искусственно задаваемой экспериментатором?
3.Как складываются друг с другом случайные и приборные погрешности аргументов функции, частные приборные погрешности аргументов функции, частные случайные погрешности, приборная и случайная погрешности функции в методе переноса погрешностей?
4.Как складываются друг с другом частные приборные погрешности аргументов функции, частные случайные погрешности, приборная и случайная погрешности функции в выборочном методе?
5.Сформулируйте алгоритм обработки данных методом переноса погрешностей.
6.Сформулируйте алгоритм обработки данных выборочным методом.
4.СОВМЕСТНЫЕ ИЗМЕРЕНИЯ
4.1. Задача регрессии и метод наименьших квадратов
Задачей обработки совместных измерений является построение аналитической зависимости по имеющимся совместным измерениям двух (или нескольких) величин. В общем случае структура зависимости y = f(x) заранее неизвестна и определяется исходя из имеющихся экспериментальных данных. В ряде случаев предполагаемый вид функциональной зависимости y = f(x) известен заранее на основании каких-либо теоретических соображений и неизвестны лишь параметры этой зависимости.
На плоскости xOy каждая пара совместно измеренных значений (xi, yi) определяет положение некоторой точки. Величины xi и yi не свободны от погрешностей, поэтому определяемые ими точки не лежат точно на какой-то кривой, а образуют некоторое облако с нечеткими границами (рис. 4.1). Подлежащая определению функциональная зависимость y = f(x) описывает некоторую кривую, называемую регрессионной кривой, проходящую через область, заполненную точками (xi, yi). В основу выбора вида кривой y = f(x) могут быть положены различные факторы: вид облака точек и имеющаяся информация о связи величин x и y, а также соображения удобства использования полученной кривой в дальнейшем и др.
43
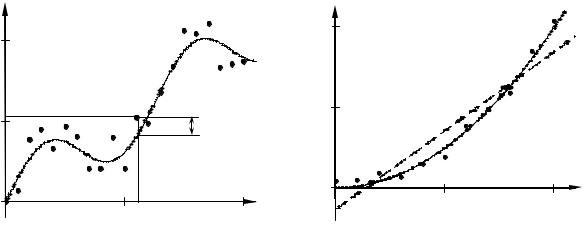
Сопоставление полученных в результате решения этих задач экспериментальной зависимости и конкретизированной теоретической кривой позволяет сделать вывод о справедливости положений данной теории. Таким образом, просто найти параметры теоретической кривой, наилучшим образом соответствующие эксперименту, не достаточно. Для подтверждения справедливости теории необходимо также, чтобы совпадали основные качественные особенности поведения этих кривых. Так, для случая, показанного на рис. 4.2, аппроксимация экспериментальной зависимости прямой линией (показана штрихами) недопустима и необходимо использование нелинейной функции (показана сплошной линией).
y |
|
f(x) |
|
yi |
∆yi |
|
|
0 |
xi |
|
Рис. 4.1. Регрессионная кривая |
|
y y |
|
x |
0 |
xx |
|
|
Рис. 4.2. Пример необходимости |
нелинейной аппроксимации
Аналитическая зависимость y = f(x) обычно содержит ряд параметров a1, a2, …, aK, не зависящих от х, и выражение подлежащей определению кривой можно записать в виде
y = f (x, a1, a2 ,..., aK ) . |
(4.1) |
Изменяя параметры, можно изменять как вид кривой в некоторых пределах, так и ее положение на плоскости xOy.
В случае совпадения качественных особенностей кривых указанные параметры зависимости должны быть найдены таким образом, чтобы искомая теоретическая кривая y = f(x) наилучшим образом ложилась бы на экспе-
риментальные точки набора совместных наблюдений (xi, yi), i = 1, …, |
N. Под- |
ставив в качестве аргумента функции (4.1) значение xi, |
получим |
y = f (xi , a1, a2 , ..., aK ) ¹ yi . Для наблюдений будут иметь место отклонения
Dyi = yi - f (xi , a1, a2 , ..., aK ) , |
(4.2) |
44 |
|

которые называются остаточными погрешностями.
Существуют различные критерии выбора наилучшего соответствия экспериментальных точек и регрессионной кривой. Одним из наиболее общих способов отыскания оценок истинных значений искомых параметров является разработанный Лежандром и Гауссом метод наименьших квадратов (МНК). Согласно этому методу оценки параметров aj выбираются так,
чтобы минимизировать сумму квадратов остаточных погрешностей
g(a1, a2 , ..., |
aK ) = ∑( |
yi )2 → |
min . |
(4.3) |
|
i |
a1, a2 , ..., aK |
|
|
В точке минимума |
(4.3) |
частные |
производные |
функции |
g(a1, a2 , ..., aK ) по каждому параметру должны обращаться в нуль, что приводит к системе уравнений
∂g(a1, a2 |
, ..., aK ) |
= ∑[ yi − f (xi , a1, a2 , ..., aK )] |
∂f (xi , a1, a2 |
, ..., aK ) |
= 0, (4.4) |
|
∂a j |
∂a j |
|
||||
|
i |
|
|
|||
где j = 1, |
2, ... , K , |
позволяющей определить наилучшие значения парамет- |
||||
ров согласно условию (4.3). |
|
|
|
|||
При использовании МНК значения xi обычно задаются экспериментатором, поэтому можно считать, что они содержат только приборные погрешности и не содержат случайных. Значения yi содержат как приборные, так и случайные погрешности. Для определения случайных погрешностей параметров a1, a2 , ..., aK предположим, что распределения величин yi взаимно независимы и имеют одно и то же среднеквадратическое отклонение.
При выполнении этих условий остаточная дисперсия, представляющая собой среднее значение суммы квадратов остаточных погрешностей ве-
личины y, также обращается в минимум: |
|
||||
S y2 = |
1 |
g(a1, a2 , ..., aK ) = |
1 |
∑[ yi − f (xi , a1, a2 , ..., aK )]2 , (4.5) |
|
N − K |
N − K |
||||
|
|
i |
|||
|
|
|
|
||
где K – количество искомых параметров; N – K – число степеней свободы уравнения регрессии. Появление множителя 1 ( N − K ) взамен 1 N обосновывается в математической статистике.
N обосновывается в математической статистике.
45

4.2. Случай линейной зависимости двух величин
Задача нахождения наилучшей аппроксимирующей кривой в общем случае является достаточно сложной и наиболее просто решается, если функциональная зависимость имеет вид прямой линии у = ax + b. Поэтому на практике, если это возможно, сложные функциональные зависимости сводят к линейным зависимостям. При этом задача нахождения регрессионной кривой сводится к решению следующих задач:
1. Линеаризация нелинейных зависимостей, которая осуществляется соответствующей заменой переменных. Примеры такой замены приведены в табл. 4.1.
|
|
|
|
|
|
|
|
|
Таблица 4.1 |
|
|
|
|
|
|
|
|
|
|||
№ |
Исходная функция |
Замена переменных |
Новая функция |
|||||||
|
|
|
|
|
|
|
|
|
||
1 |
y = Axn |
X = xn , |
a = A |
y = aX |
||||||
|
|
|
|
|
|
|
|
|||
2 |
y = Axn |
Y = ln y, X = ln x, a = n, b = ln A |
Y = aX + b |
|||||||
|
|
|
|
|
|
|
|
|||
3 |
y = Aeax |
Y = ln y, b = ln A |
Y = ax + b |
|||||||
|
|
|
|
|
|
|
|
|||
4 |
y = axn + b |
X = xn |
y = aX + b |
|||||||
|
|
|
|
|
|
|
|
|
|
|
5 |
y = |
|
|
1 |
|
|
Y = 1 y, |
X = xn |
Y = aX + b |
|
|
|
|
|
|
||||||
axn + b |
||||||||||
|
|
|
|
|
||||||
6 |
y = |
|
x |
Y = 1 y , X = 1 x |
Y = aX + b |
|||||
|
|
|
|
|||||||
a |
+ bx |
|||||||||
|
|
|
|
|
|
|||||
7 |
y = axn + bxm |
Y = yx−m , |
X = xn−m |
Y = aX + b |
||||||
8 |
y = a sin x + b cos x |
Y = y cos x , |
X = tg x |
Y = aX + b |
||||||
|
|
|
|
|
|
|
|
|
|
|
В некоторых случаях различные замены переменных могут приводить одну и ту же функцию к линейному виду несколькими способами. Например, эта ситуация возможна для зависимости y = Ax n, соответствующие замены переменных приведены в строках 1 и 2 табл. 4.1.
2.Нахождение наилучших значений коэффициентов a и b в линейной зависимости у = ax + b или коэффициента a в зависимости у = ax согласно методу наименьших квадратов.
3.Нахождение случайных и приборных погрешностей этих коэффици-
ентов.
4.Определение по найденным значениям коэффициентов a и b физических констант, содержащихся в этих коэффициентах. Последняя задача ре-
46
шается стандартным приемом метода переноса погрешностей при косвенных измерениях.
4.3. Нахождение коэффициентов в уравнении прямой у = ax + b
Нахождение наилучших значений коэффициентов a и b в зависимости у = ax + b производится согласно описанному методу наименьших квадратов. В случае линейной зависимости (4.4) приводит к системе из двух уравнений относительно двух неизвестных a и b:
a∑ xi2 |
+ b∑ xi = ∑ xi yi ; |
|
||
|
i |
i i |
|
|
|
(4.6) |
|||
a∑ xi + bN = ∑ yi. |
||||
|
|
|||
|
i |
i |
|
|
Решение системы (4.6) дает нам выражения для наилучших оценок значений параметров. Обозначив эти оценки a и b , получим
|
|
|
|
|
|
|
|
|
∑ xi yi − N |
|
|
|
|
|
|
|
∑(xi − |
|
|
)( yi − |
|
) |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
y |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
x |
y |
= |
; |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
a = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑(xi − |
|
)2 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
∑ xi2 − N |
|
2 |
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
x |
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
x |
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.7) |
||
|
|
|
|
|
|
|
|
|
|
|
|
y∑ xi2 − x∑ xi yi |
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
i |
|
|
|
= |
|
− |
|
|
|
, |
|
||||||||||
|
|
|
|
|
|
b |
|
|
|
|
|
y |
a |
x |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
∑ xi |
|
− N x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
где |
|
= |
1 |
∑ xi , |
|
= |
1 |
∑ yi . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
x |
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
N |
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
i |
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Последнее выражение для b говорит о том, что линия регрессии про-
ходит через точку с координатами ( x , y ). Используя дополнительную точку
с координатами (b , 0) можно по двум точкам построить искомую аппроксимирующую прямую.
Для нахождения дисперсий коэффициентов a и b воспользуемся соотношениями (4.7). С учетом формулы (2.14) дисперсии суммы случайных некоррелированных величин y1, ... , yN с одинаковой дисперсией, получим в
предположении, что xi не содержат случайных погрешностей:
S |
2 |
|
= |
S y2 |
, S |
2 |
= |
S y2 ∑ xi2 |
, |
(4.8) |
|||||
|
|
|
|||||||||||||
a |
|
|
|
|
b |
|
|
|
|||||||
|
|
|
|
|
|
||||||||||
|
|
∑ xi2 − N x2 |
|
|
N (∑ xi2 − N x2 ) |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
||||||
47

где остаточная дисперсия S y2 рассчитывается согласно (4.5) и может быть приведена к виду
S y2
сии
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
1 |
|
|
|
|
|
|
1 |
∑( yi − y ) |
|
|
|
∑(xi − x) |
||||||||||
= |
|
∑ yi2 |
− a∑ xi yi − b∑ yi |
= |
|
|
− a2 |
|
. |
||||||||||||||
N − 2 |
N − 2 |
|
|
||||||||||||||||||||
|
|
i |
|
|
i |
|
|
|
|
i |
|
|
|
|
i |
|
|
||||||
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
||||||||
Выражения для дисперсий (4.8) после подстановки остаточной диспер- S y2 и значений x , y принимают вид
|
|
|
|
|
|
∑( yi − |
|
)2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
2 |
|
|
1 |
|
|
|
|
− a2 |
|
|
|
|
|
|
|
|
|
1 |
∑(xi − x) |
||||||||||
S |
|
= |
|
i |
|
|
, |
S |
2 |
= S |
2 |
|
x2 |
+ |
|
. (4.9) |
||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
a |
N − 2 |
|
|
|
|
b |
a |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|||||||||
|
|
|
|
|
∑(xi − x) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|||||||||
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Тогда случайные погрешности коэффициентов будут иметь вид
|
|
|
|
|
|
|
|
|
a = tP, N −1S |
|
|
, |
|
b = tP, N −1S |
|
, |
||||
|
|
|
|
|
a |
b |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
= S |
|
2 , S |
|
= S |
|
2 – СКО |
|
|
||||||||||
где S |
|
|
|
|
a |
и |
b |
соответственно; tP, N −1 – коэффици- |
||||||||||||
a |
a |
b |
b |
|||||||||||||||||
ент Стьюдента с ν = N – 2 степенями свободы. Приборные погрешности коэффициентов a и b могут быть найдены на основе (4.7) по формуле (3.10) косвенных измерений, что дает
|
1 |
N |
|
|
|
∂a |
|
|
|
∂a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
θa = |
|
∑ |
|
|
|
|
θx + |
|
|
|
|
θ y |
= 0 , |
θb = |
a |
θx + θ y . |
(4.10) |
||||
N |
∂x |
∂y |
|||||||||||||||||||
|
i=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
i |
|
|
|
i |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Равенство нулю приборной погрешности в определении коэффициента наклона a прямой означает, что он не зависит от одновременного смещения всех координат xi или yi на величины θx или θy соответственно.
Если x и y являются косвенно измеряемыми величинами, полученными, например, при замене переменных в процессе линеаризации, приборные погрешности θx и θy необходимо вычислить согласно стандартным приемам об-
работки |
данных |
косвенных измерений. Определив полные |
погрешности |
||||||||||||
|
|
= a |
и |
|
= |
b + θb , уравнение регрессионной прямой можно записать в |
|||||||||
|
a |
b |
|||||||||||||
виде |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
y = ( |
|
± |
|
)x + ( |
|
± |
|
), с вероятностью P = P0 . |
(4.11) |
|
|
|
|
|
|
a |
a |
b |
b |
|||||||
48