

6226
.pdf
|
20 |
|
|
|
|
|
||
|
y |
|
y |
|
y |
|
(23) |
|
grad y(x) |
, |
,..., |
|
|||||
|
|
|
||||||
|
x1 |
x2 |
xn |
|
||||
служат, как известно, коэффициенты при линейных членах разложения функ-
ции у(х) в ряд Тейлора по степеням xi (i = 1, 2, ..., n), то соответствующие ком-
поненты вектора градиента могут быть получены как коэффициенты b1, b2, ..., bn линейной аппроксимации поверхности отклика вблизи исходной точки х1:
yˆ(x) b0 b1x1 b2x2 ... bnxn. |
(24) |
Проведение эксперимента, вычисление коэффициентов линейной модели
и статистический анализ результатов проводят в соответствии с рекомендация-
ми, приведенными в п. 2.2;
2) вычисляются произведения bi xi, где xi – шаг варьирования параметра
xi – при проведении ПФЭ, и фактор, для которого это произведение максималь-
но, принимается за базовый, т. е.
max(bi xi) bδ xδ; |
(25) |
3) для базового фактора выбирается шаг варьирования при крутом восхо- |
|
ждении λкв = хδ или вводится более мелкий; |
|
4) определяются размеры λкв по остальным |
переменным процесса |
хf (f ≠ 1). Поскольку при движении по градиенту варьируемые параметры долж-
ны изменяться пропорционально коэффициентам bf = у/Δхf [компонентам век-
тора grad у(х)], то соответствующие находятся но формуле
λfкв |
bf |
xf |
|
|
λкв, |
(26) |
||
|
|
b |
x |
|
|
|||
|
|
|||||||
|
|
|
δ |
δ |
|
|
|
|
где λкв и хf всегда положительны, а коэффициент bf берется со своим знаком; 5) производятся так называемые мысленные опыты, которые заключают-
ся в вычислении «предсказанных» значений выхода yˆпрh(xh)в определенных точках хh факторного пространства (рис. 5, а). Для этого независимые перемен-
ные линейной модели объекта изменяются с учетом (26) таким образом, чтобы
21
изображающая точка х совершала шаговое движение в направлении вектора grad у(х), полученного выше, занимая последовательно положения
|
|
|
|
x1, x2,..., xm. |
|
|||||
Очевидно, f-координата h-ой точки будет |
|
|||||||||
|
|
xhf |
x1f h fкв; f |
1, 2,..., n, |
(27) |
|||||
тогда |
|
|
|
|
|
|
|
|
|
|
yˆ |
|
|
|
n |
|
|
fкв |
|
|
|
|
b |
h |
b |
|
|
, |
h 1,2,..., m. |
(28) |
||
|
|
|
|
|||||||
|
прh |
0 |
f 1 |
f xf |
|
|
||||
Вычисления по (28) можно упростить, заменив их выражением |
|
|||||||||
|
yˆпрh hyˆпр1 (h 1)b0, |
h 1, 2,...,m |
(29) |
|||||||
или еще более удобным рекуррентным соотношением |
|
|||||||||
yˆпрh yˆпрh 1 |
(yˆпр1 b0), |
h 1,2,..., m; |
(30) |
|||||||
6) мысленные опыты продолжаются до тех пор, пока выполняется нера- |
||||||||||
венство |
|
|
|
|
|
|
|
|
|
|
|
|
|
yˆпрh (1 2)yмакс, |
(31) |
||||||
где умакс – максимально возможный выход, определяемый из физических сооб-
ражений.
Если условие (31) нарушается приk ≤ 3, то шаг λкв следует уменьшить, и,
наоборот, когда k слишком велико, шаг надо увеличить. Таким образом, мыс-
ленные опыты помогают подобрать подходящий шаг λкв; 7) некоторые из мысленных опытов (обычно через каждые два-три мыс-
ленных шага) реализуются на объекте для проверки соответствия аппроксима-
ции объекта гиперплоскостью. Наблюдаемые значения уэк сравниваются с предсказанными yˆпр (рис. 5, б);

22
Рис. 5. Метод крутого восхождения:
а– иллюстрация движения к экстремуму; б – сравнение предсказанных y(x)
инаблюденных значений yэк(x).
8)точка х, где в реальном опыте получено максимальное значение выхо-
да, принимается за новую начальную точку, в окрестности которой снова про-
водятся ПФЭ и ДФЭ, и цикл крутого восхождения, описанный выше, повторя-
ется;
9) поскольку каждый цикл крутого восхождения приближает нас к облас-
ти экстремума у (х), где крутизна поверхности отклика меньше, то для каждого последующего цикла выбирается равным или меньшим, чем для предыдущего; 10) поиск прекращается, когда все коэффициенты bi (i = 1, 2, ..., п) линей-
ной модели объекта получаются незначимыми. Это свидетельствует о выходе в область экстремума целевой функции.
2. Симплексный метод оптимизации.
Основной особенностью симплексного метода поиска является совмеще-
ние процессов изучения поверхности отклика и перемещения по ней. Это дос-
тигается тем, что эксперименты ставят только в точках факторного пространст-
ва, соответствующих вершинам симплексов; n-мерный симплекс – это выпук-
лая фигура, образованная п + 1 точками (вершинами). Так, на плоскости сим-
плексом является треугольник, в трехмерном пространстве – тетраэдр и т. д.
23
Симплекс называется регулярным, если все расстояния между его вершинами равны.
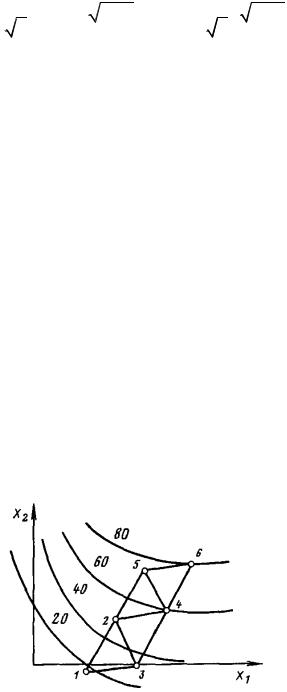
В основе использования симплекса для целей оптимизации лежит сле-
дующее его важное свойство: из любого симплекса можно, отбросив одну из вершин и использовав оставшуюся грань, получить новый симплекс, добавив всего лишь одну точку. Путем последовательного отбрасывания вершин можно осуществлять перемещение симплекса в факторном пространстве, причем это перемещение будет происходить с каждым экспериментом.
Если произвести эксперимент в вершинах симплекса, то очевидно, что направление максимального подъема поверхности отклика, определенное на основании сделанных измерений, будет проходить из центра симплекса через грань, противолежащую вершине с минимальным значением выхода y. Поэтому для продвижения к экстремуму естественно перейти от исходного симплекса к симплексу, находящемуся в области более высокого значения отклика, путем отбрасывания вершины с минимальным выходом y и построения регулярного симплекса с новой вершиной, являющейся в силу симметрии зеркальным ото-
бражением отброшенной. Затем процесс отбрасывания вершины с минималь-
ным откликом и построения нового симплекса повторяется, в результате чего формируется цепочка симплексов, перемещающихся в факторном пространстве к точке экстремума (рис. 6).
Симплексный метод оптимизации осуществляется в следующей последо-
вательности:
1) из априорных сведений о процессе задается шаг варьирования
хi (i = 1, 2, ..., п) по каждому фактору хi;
2)задается размер симплекса ρ, т. е. расстояние между двумя вершинами
вединицах (шагах) варьирования соответствующих факторов;
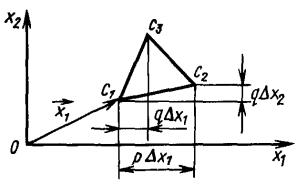
3)производится ориентация первоначального симплекса. Для этого одна
из вершин C10 помещается в исходную точку х1. Положение остальных вершин
начального симплекса определяется с помощью векторов
24
|
C0 |
x |
ρ(p x , q x |
,..., q x ); |
|
|
|
|
|
|
|
||||||||||||||
|
|
2 |
|
|
1 |
|
1 |
2 |
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|||
|
C0 |
x |
ρ(q x , p x |
,..., q x ); |
|
|
|
|
|
|
(32) |
||||||||||||||
|
|
3 |
|
|
1 |
|
1 |
2 |
|
|
|
|
n |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
C0 |
|
|
x ρ(q x , q x |
,..., |
p x |
n |
), |
|
|
|
|
|
|
|||||||||||
|
|
n 1 |
|
1 |
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
1 |
|
|
n 1 |
|
, |
q |
|
1 |
|
|
|
|
|
1 . |
|
(33) |
|||||||
|
|
|
n 1 |
|
n 1 |
|
|||||||||||||||||||
n |
|
|
|
n |
|
|
|
|
|
||||||||||||||||
|
2 |
|
2 |
|
|
||||||||||||||||||||
Для двухфакторной задачи координаты вершин C0 |
, |
C0 |
, |
C0 |
начального |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
3 |
|
симплекса при ρ = 1 приведены в табл. 4. Положение начального симплекса в факторном пространстве для этого случая дано на рис 7;
4) реализуется эксперимент в вершинах симплекса, т. е при значениях
варьируемых |
параметров хi, соответствующих |
координатам вершин |
||||
C1, C2, ..., Cn +1 |
Наблюденные значения выхода в соответствующих точках будем |
|||||
обозначать уli, где l – номер симплекса, a i – номер вершины. |
||||||
|
|
|
|
|
Таблица 4 |
|
|
|
|
Координаты вершин симплекса |
|
|
|
|
|
|
|
|
|
|
|
Вершина |
|
Ось |
|
|
|
|
x1 |
|
x2 |
|
||
|
|
|
|
|
||
|
C0 |
|
x11 |
|
x12 |
|
|
1 |
|
|
|
|
|
|
C20 |
|
x11+p x1 |
|
x12+q x2 |
|
|
C0 |
|
x11+q x1 |
|
x12+p x2 |
|
|
3 |
|
|
|
|
|
Рис. 6. Оптимизация симплексным методом.
25
Рис. 7. Определение координат вершин регулярного симплекса.
5) точка Clf, в которой наблюдается минимальный отклик, т. е. выполня-
ется условие ylf min yli , отбрасывается и находится вершина C(l +1) f следую-
i
щего симплекса – зеркальное отображение Clf относительно оставшейся грани.
Координаты хi (i = 1, 2, ..., п) точки Clf обозначим xlfi, тогда для C(l +1) f будем иметь
x |
|
2 |
(x |
x |
x |
x |
) x , |
i 1,2,..., n. |
(34) |
|
n |
||||||||||
(l 1) fi |
|
l1i |
l2i |
l( f 1)i |
l(n 1)i |
lfi |
|
|
Если в результате эксперимента в двух вершинах симплекса окажется одинаковое минимальное значение выхода, т. е.
y |
y |
min y , |
(35) |
|
if |
lh |
i |
li |
|
то решение о дальнейшем движении симплекса принимается случайным обра-
зом (например, бросанием монеты);
6) производится эксперимент в вершине C(l + 1)f нового симплекса C(l + 1)1
C(l + 1)2, C(l + 1)3, …, C(l + 1)(n +1) и его результаты y(l +1)i сопоставляются со значе-
ниями выхода в остальных вершинах. Затем повторяется процедура отбрасыва-
ния вершины с минимальным выходом.
Если значение выхода y(l +1)f во вновь определенной вершине снова ока-
жется минимальным, то осуществляют возврат к исходному симплексу и от-
брасывание вершины со следующим по порядку минимальности значением вы-
хода;
7) критерием выхода в район оптимума служит прекращение поступа-
тельного движения симплекса. Он начинает вращение вокруг одной из вершин
26
(т. е. одна и та же точка встречается более чем в п + 1 последовательных сим-
плексах). Подобная ситуация может возникнуть в двух случаях:
а) более высокий отклик в указанной точке получился в результате влияния ошибок эксперимента. В этом случае повторный эксперимент проясня-
ет картину, и поиск точки экстремума продолжается в прежней последователь-
ности;
б) если повторный эксперимент в сомнительной точке вновь даст самое большое значение отклика, то, очевидно, данная вершина находится в непо-
средственной близости от точки экстремума и поиск прекращается.
Для n = 3 и п = 7 эксперименты в вершинах регулярного симплекса обра-
зуют при соответствующей ориентации план, совпадающий с ДФЭ типов 23 1 и
27 - 4; отсюда следует, что по данным этих экспериментов легко могут быть вы-
числены коэффициенты линейной модели.
Симплексный метод оптимизации целесообразно применять в ситуациях,
когда дисперсия помехи велика и нет априорной информации о характере по-
верхности отклика.
2.4 Планирование эксперимента второго порядка
Планированием эксперимента второго порядка называется такое плани-
рование, которое позволяет получить математическую модель исследуемого объекта в виде полного полинома второго порядка
yˆ b |
n |
n |
b |
x x |
|
n |
(36) |
bx |
|
f |
b x2 |
||||
0 |
i i |
i, f 1 |
if |
i |
ii i |
|
|
|
i 1 |
|
|
|
i 1 |
|
i f
и аппроксимация ее плоскостью не обеспечивает требуемую точность.
Планы второго порядка отличаются от линейных тем, что факторы варьи-
руются на нескольких уровнях, как минимум на трех.
Экспериментальные планы второго порядка являются, как правило, ком-
позиционными, т. е. состоящими из нескольких блоков, реализуемых последо-
вательно: а) ПФЭ или ДФЭ; б) центральные точки, расположенные в начале ко-
27
ординат факторного пространства безразмерных переменных; в) так называе-
мые звездные точки, координаты которых соответственно равны нулю, за ис-
ключением одной, которая принимает значения +α и –α, где α – звездное плечо.
Экспериментальные планы второго порядка могут быть классифицирова-
ны с точки зрения заложенных в них критериев оптимальности. Выбор соответ-
ствующего плана решается исследователем до проведения эксперимента
Ортогональное центральное композиционное планирование (ОЦКП).
В ОЦКП критерием оптимальности плана является ортогональность столбцов матрицы планирования. В силу ортогональности планирования все коэффициенты модели определяются независимо друг от друга.
Преимущество такого планирования заключается в простоте вычисления коэффициентов модели методом наименьших квадратов
В табл. 5 приведены параметры ортогонального плана, где α – звездное плечо; NФ – число точек ПФЭ (ДФЭ); N0, Nα – числа центральных и звездных точек соответственно; N – общее число точек.
Звездные точки определяются значением α, характеризующим уровень варьирования одной из переменных при нулевых значениях других перемен-
ных. Значение α рассчитывается из условия ортогональности столбцов матрицы планирования.
Таблица 5
Параметры ортогонального плана
n |
α |
NФ |
Nα |
N0 |
N |
2 |
1,0 |
4 |
4 |
1 |
9 |
3 |
1,215 |
8 |
6 |
1 |
15 |
4 |
1,414 |
16 |
8 |
1 |
25 |
Матрица планирования для п = 3 приведена в табл. 6. Ортогонализация
столбцов х0 и xi2 проводится путем преобразования
|
|
|
1 |
N |
|
|
|
|
|
|
|
|
x 2 |
x2 |
|
x2 |
x2 |
x 2 |
x2 |
0,73. |
(37) |
||||
|
||||||||||||
i |
i |
|
N g |
1 |
gi |
i |
i |
i |
|
|
||

28
Таблица 6
Ортогональный центральный композиционный план для n = 3
Параметры плана |
N |
z0 |
z1 |
z2 |
z3 |
z4 |
z5 |
z6 |
z7 |
|
z8 |
|
z9 |
|
x |
x |
x |
x |
x2 |
x2 |
x2 |
x x |
2 |
x x |
3 |
x x |
3 |
||
|
|
0 |
1 |
2 |
3 |
1 |
2 |
3 |
1 |
1 |
2 |
|||
|
1 |
+1 |
–1 |
–1 |
–1 |
0,27 |
0,27 |
0,27 |
+1 |
+1 |
+1 |
|||
|
2 |
+1 |
+1 |
–1 |
–1 |
0,27 |
0,27 |
0,27 |
–1 |
–1 |
+1 |
|||
Полный факторный |
3 |
+1 |
–1 |
+1 |
–1 |
0,27 |
0,27 |
0,27 |
–1 |
–1 |
–1 |
|||
4 |
+1 |
+1 |
+1 |
–1 |
0,27 |
0,27 |
0,27 |
+1 |
–1 |
–1 |
||||
эксперимент |
5 |
+1 |
–1 |
–1 |
+1 |
0,27 |
0,27 |
0,27 |
+1 |
–1 |
–1 |
|||
|
6 |
+1 |
–1 |
+1 |
+1 |
0,27 |
0,27 |
0,27 |
–1 |
+1 |
–1 |
|||
|
7 |
+1 |
–1 |
+1 |
+1 |
0,27 |
0,27 |
0,27 |
–1 |
–1 |
+1 |
|||
|
8 |
+1 |
+1 |
+1 |
+1 |
0,27 |
0,27 |
0,27 |
+1 |
+1 |
+1 |
|||
|
9 |
+1 |
–1,215 |
0 |
0 |
0,75 |
–0,73 |
–0,73 |
0 |
|
0 |
|
0 |
|
|
10 |
+1 |
–1,215 |
0 |
0 |
0,75 |
–0,73 |
–0,73 |
0 |
|
0 |
|
0 |
|
Звездные точки |
11 |
+1 |
0 |
–1,215 |
0 |
–0,73 |
0,75 |
–0,73 |
0 |
|
0 |
|
0 |
|
12 |
+1 |
0 |
+1,215 |
0 |
–0,73 |
–0,73 |
0,75 |
0 |
|
0 |
|
0 |
|
|
|
|
|
|
|||||||||||
|
13 |
+1 |
0 |
0 |
–1,215 |
–0,73 |
–0,73 |
0,75 |
0 |
|
0 |
|
0 |
|
|
14 |
+1 |
0 |
0 |
+1,215 |
–0,73 |
–0,73 |
0,75 |
0 |
|
0 |
|
0 |
|
Центральная точка |
15 |
+1 |
0 |
0 |
0 |
–0,73 |
–0,73 |
–0,73 |
0 |
|
0 |
|
0 |
|
Проведение эксперимента.
Точно так же как и при проведении ПФЭ, из-за случайного характера из-
менения выходной величины y в каждой точке xg приходится проделывать т параллельных опытов и результаты наблюдений усреднять
yˆg |
1 m |
(38) |
|
|
ygi. |
||
|
|||
|
mi 1 |
|
|
Рандомизация порядка проведения опытов в каждой серии испытаний проводится по специальной методике.
Вычисление коэффициентов уравнения регрессии.
Оценки коэффициентов уравнения регрессии определяются по формуле
|
N |
|
|
|||
|
zgi |
y |
g |
|
|
|
b |
g 1 |
. |
(39) |
|||
N |
||||||
i |
|
|
||||
|
zgi2 |
|
|
|||
g 1
Свободный член уравнения регрессии после преобразования переменных
(перехода от xi1 к xi2 ) должен быть скорректирован по формуле
|
|
n |
|
||
b |
b |
b |
x |
2. |
(40) |
0скор |
0 |
ii i |
|
||
i 1

29
Статистический анализ полученных результатов.
Проверка значимости коэффициентов регрессии проводится по t-крите-
рию Стьюдента, как описано в п. 2.2. Дисперсия коэффициентов вычисляется по формулам
|
s2(b ) |
s2(y) |
; |
|
|
(41) |
|
|
N |
||||||
|
i |
|
|
|
|
|
|
|
|
|
m sgl2 |
|
|
|
|
|
|
|
g 1 |
|
|
|
|
|
|
|
n |
|
|
|
|
s2(b |
) s2 |
(b ) s2 |
(b )( |
x |
2)2. |
(42) |
|
0скор |
|
0 |
|
ii |
|
||
i 1
Проверка адекватности уравнения регрессии производится так же, как описано в п. 2.2.
Ротатабельное центральное композиционное планирование (РЦКП).
Критерием оптимальности в РЦКП является условие
σ2(y) const при R const, |
(43) |
где R – радиус-вектор в факторном пространстве.
Дисперсия (точность) предсказания выхода по найденному уравнению регрессии постоянна в различных направлениях факторного пространства в точках, расположенных на одинаковых расстояниях от центра планирования.
Кроме того, при РЦКП обеспечивается равная точность предсказания вы-
хода внутри области планирования. В табл. 7 даны характеристики РЦКП для каждого n = 2, 3, 4. Звездные точки для каждого значения п вычислены при ус-
ловии выполнения критерия ротатабельности.
Таблица 7
Параметры РЦКП
n |
α |
NФ |
Nα |
N0 |
N |
2 |
1,414 |
4 |
4 |
5 |
13 |
3 |
1,682 |
8 |
6 |
6 |
20 |
4 |
2,000 |
16 |
8 |
7 |
31 |
В табл. 8 приведена матрица РЦКП для трехфазной задачи.