

1fedorenko_a_a_ivanchura_v_i_praktikum_po_teorii_avtomatiches
.pdf51
3. КУРСОВАЯ РАБОТА «РАСЧЕТ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
3.1. Задание на проектирование
Цель настоящей курсовой работы – закрепление знания основных положений классической теории автоматического управления. В работе рассматриваются задачи анализа и синтеза линейных непрерывных систем, а также отдельные приложения теории линейных импульсных систем. В качестве основного метода исследования используется метод логарифмических частотных характеристик, который отличается простотой, наглядностью, и приводит к легко обозримым результатам. Кроме того, возможно широкое применение средств вычислительной техники. Программное обеспечение к курсовой работе включает пакеты прикладных математических программ
MATLAB и MATKAD.
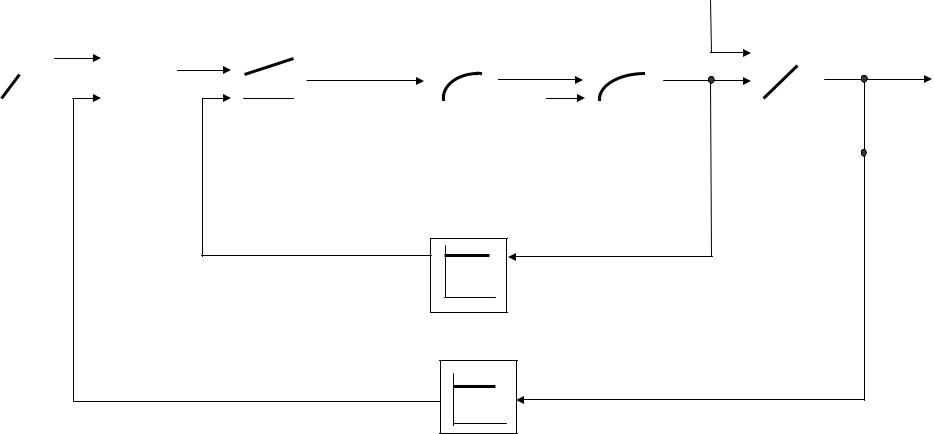
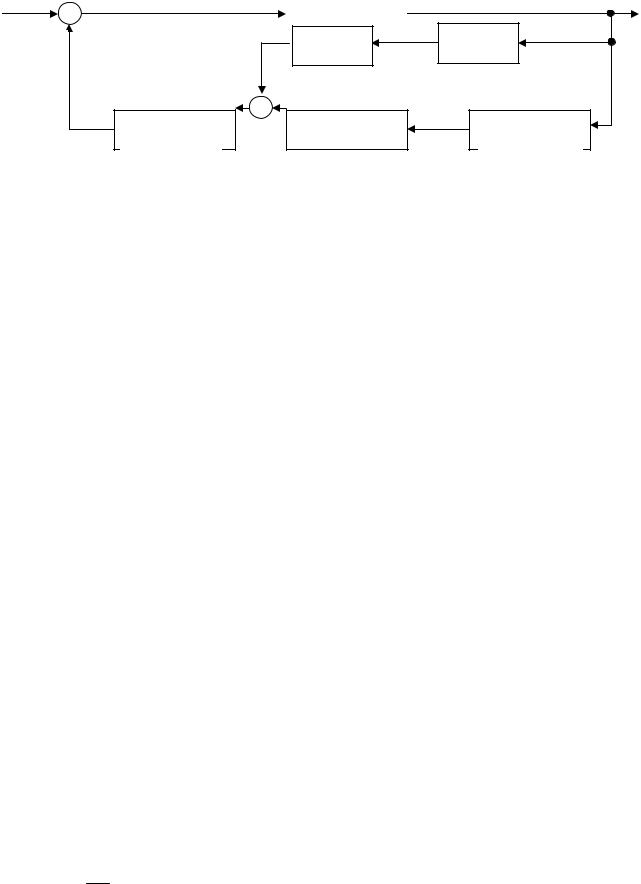
Вработе предлагается провести исследование автоматизированного электропривода постоянного тока, функциональная схема которого (рис. 3.1), включает два контура регулирования: внутренний - контур регулирования тока
ивнешний - контур регулирования скорости. В контур регулирования тока входят регулятор тока (РТ), тиристорный преобразователь (ТП), звено,
учитывающее электромагнитную инерцию двигателя постоянного тока (Д1), и датчик тока (ДТ). На входе регулятора тока происходит сравнение сигнала
задания тока i3 с выхода регулятора скорости с сигналом, пропорциональным фактическому току двигателя i с выхода датчика. Регулятор тока в соответствии с алгоритмом его функционирования формирует диаграмму изменения тока якорной цепи двигателя.
Вконтур регулирования скорости входят регулятор скорости (РС), замкнутый контур регулирования тока, звено, учитывающее механическую
инерцию двигателя постоянного тока (Д2), и датчик скорости ДС. Сигнал задания для системы в целом формируется задатчиком интенсивности (ЗИ), обеспечивающим необходимый темп изменения скорости и ее установившееся значение. В остальном принцип функционирования контура скорости аналогичен контуру тока. При необходимости ограничение значений координат
электропривода i и UТП может осуществляться нелинейными обратными связями, охватывающими соответствующие регуляторы.
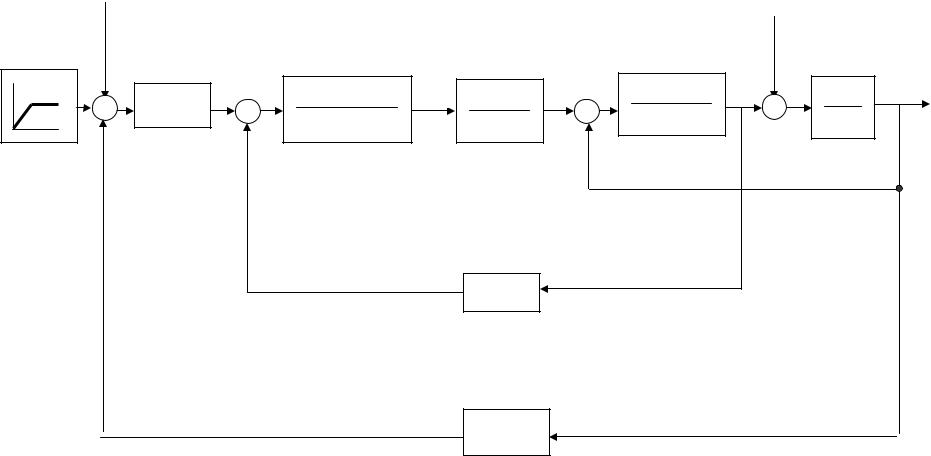
На основании функциональной схемы электропривода составляется структурная схема системы (рис. 3.2.), которая является основной исходной расчетной схемой. Структура и параметры каждого элемента задаются индивидуально каждому студенту, за исключением регулятора скорости. Структура и параметры регулятора скорости являются искомыми и определяются в процессе синтеза, исходя из обеспечения показателей системы. На систему действуют: входной сигнал, определяющий значение скорости электропривода ω3 (t) − (далее – управляющее воздействие); момент нагрузки,
действующий на валу электродвигателя и выраженный в виде статического
52
тока iC (t) − (далее – возмущающее воздействие); сигнал помехи N(t),
суммирующийся с управляющим воздействием на входе регулятора скорости – (далее – помеха).
Рассматриваемая система должна обеспечивать следующие показатели качества по реакции на ω3 (t) = 1(t):
1)астатизм 2-го порядка;
2)перерегулирование σ ≤ (30 ÷ 50)% ;
3)время достижения максимума переходной функции tМ = (0.12÷0.2) с;
4)время переходного процесса tПП = (0.25÷0.4) с.
Работа должна содержать следующее:
1.Введение, постановка задачи.
2.Синтез последовательного корректирующего устройства - регулятора скорости РС.
2.1.Построение частотных характеристик неизменной части системы.
2.2.Построение желаемой частотной характеристики и синтез корректирующего устройства.
3.Исследование устойчивости и качества динамических режимов
системы.
3.1.Определение запасов устойчивости.
3.2.Построение реакции системы i(t), ω(t) на возмущающее
воздействие - ступенчатое изменение тока нагрузки iС (t) = 1(t).
3.3. Построение реакции системы на управляющее воздействие
ω3 (t) = 1(t), и на входной сигнал от задатчика интенсивности ω3 (t).
4.Исследование точности системы.
4.1.Вычисление систематических ошибок.
4.2.Определение степени влияния помех.
5.Конструктивные расчеты регулятора скорости.
5.1.Определение параметров аналогового регулятора скорости.
5.2.Определение алгоритма работы цифрового регулятора.
6.Заключение.
Данные для расчета с соответствующим номером варианта представлены в таблице, где ТЯ, ТМ - электромагнитная и электромеханическая постоянные времени электропривода; КДТ, КП, КДС - коэффициенты передачи датчика тока, тиристорного преобразователя энергии и датчика скорости; ρ - сопротивление якорной цепи; ТП - постоянная времени преобразователя. Все величины выражены в относительных единицах, в качестве базовой системы единиц выбраны номинальные данные электрооборудования и элементов системы управления.
53
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
iC |
|
|
|
|
|
|
ЗИ |
|
|
ω3 (+) |
РС |
|
|
РТ |
|
ТП |
|
|
|
Д1 |
(-) |
|
|
Д2 |
||||||||||
|
|
|
|
|
|
i3 (+) |
|
|
|
UPT |
|
|
|
UTП (+) |
|
|
|
i |
(+) |
|
|
|
|
|
ω |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
ω |
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
t |
|
|
|
|
t |
|
(-) |
|
|
t |
|
|
|
|
|
t |
|
|
|||
|
|
|
|
(-) |
|
(-) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ДТ
t
ДС
t
Рис. 3.1
54
N |
|
iC |
WPT (р) |
ЗИ |
|
WТП (р) |
Wд1(р) |
|
|
|
ω3 |
WPC(p) |
i3 |
(Т |
Я |
р + 1)ρ UPT |
КП |
UТП |
1 |
i |
i |
(-) |
ρ |
ω |
t |
|
|
|
|
ρ(ТЯ р + 1) |
|
|
|
|
||||
|
|
0.02КП КДТ р |
ТП р + 1 |
|
|
|
ТМ р |
|
|||||
(-) |
|
(-) |
(-) |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||
WДТ (р)
КДТ
WДС (р)
КДС
Рис. 3.2
55
Все необходимые построения следует выполнять на полулогарифмической бумаге в диапазоне частот от 0.1 с-1 до 1000с-4. Примеры построения отдельных характеристик, номограммы, таблицы и другие справочные материалы можно найти в [1÷11]. Для компактного и наглядного размещения характеристик на графиках рекомендуется следующие масштабы: по частоте – I декада на 50 мм; по усилению - 20 дБ на 25 мм; по фазе - 900 на
45 мм.
Графики логарифмических амплитудных и фазо-частотных характеристик рекомендуется строить на отдельных листах бумаги.
|
|
|
|
|
Таблица 3.1. |
|
|
|
|
|
|
Номер |
|
|
Данные для расчета |
|
|
варианта |
ТЯ [С] |
TM[C] |
ρ |
KДТ |
КП |
0 |
0.02 |
0.08 |
0.064 |
0.37 |
3.5 |
1 |
0.037 |
0.105 |
0.17 |
0.52 |
2.47 |
2 |
0.02 |
0.09 |
0.14 |
0.405 |
5.2 |
3 |
0.048 |
0.189 |
0.136 |
0.5 |
2.8 |
4 |
0.034 |
0.108 |
0.138 |
0.55 |
5 |
5 |
0.02 |
0.08 |
0.1 |
0.358 |
2.7 |
6 |
0.042 |
0.121 |
0.056 |
0.405 |
6.5 |
7 |
0.021 |
0.23 |
0.2 |
0.6 |
4.5 |
8 |
0.062 |
0.09 |
0.08 |
0.1 |
3.5 |
9 |
0.044 |
0.09 |
0.2 |
0.2 |
4 |
10 |
0.052 |
0.1 |
0.03 |
0.36 |
1.8 |
11 |
0.031 |
0.11 |
0.2 |
0.21 |
3.5 |
12 |
0.034 |
0.08 |
0.02 |
0.32 |
2.2 |
13 |
0.052 |
0.09 |
0.15 |
0.44 |
4.3 |
14 |
0.031 |
0.08 |
0.04 |
0.52 |
3.1 |
15 |
0.041 |
0.07 |
0.24 |
0.34 |
2.8 |
16 |
0024 |
0.05 |
0.02 |
0.22 |
3.5 |
17 |
0.036 |
0.11 |
0.28 |
0.21 |
4.5 |
18 |
0.049 |
0.118 |
0.037 |
0.357 |
1.7 |
19 |
0.024 |
0.06 |
0.028 |
0.24 |
2.7 |
20 |
0.035 |
0.11 |
0.041 |
0.31 |
1.9 |
21 |
0.026 |
0.11 |
0.28 |
0.25 |
4.4 |
22 |
0.032 |
0.11 |
0.25 |
0.31 |
4.1 |
23 |
0.037 |
0.118 |
0.049 |
0.36 |
1.5 |
24 |
0.04 |
0.076 |
0.076 |
0.03 |
2.4 |
25 |
0.026 |
0.11 |
0.21 |
0.25 |
4.2 |
26 |
0.034 |
0.11 |
0.052 |
0.32 |
2.5 |
27 |
0.015 |
0.09 |
0.28 |
0.21 |
4.8 |
28 |
0.051 |
0.11 |
0.16 |
0.15 |
4.1 |
29 |
0.045 |
0.114 |
0.035 |
0.36 |
2.1 |
56
Продолжение таблицы 3.1.
30 |
0.021 |
0.06 |
0.14 |
0.21 |
3.2 |
31 |
0.018 |
0.07 |
0.046 |
0.71 |
2 |
32 |
0.027 |
0.105 |
0.046 |
0.35 |
1.5 |
33 |
0.033 |
0.06 |
0.043 |
0.8 |
4.8 |
34 |
0.018 |
0.165 |
0.074 |
0.42 |
2.6 |
35 |
0.065 |
0.18 |
0.054 |
0.29 |
2.8 |
36 |
0.048 |
0.18 |
0.136 |
0.5 |
2.5 |
37 |
0.028 |
0.117 |
0.032 |
0.52 |
3.2 |
38 |
0.021 |
0.195 |
0.021 |
0.61 |
2.4 |
39 |
0.021 |
0.084 |
0.037 |
0.36 |
3.1 |
40 |
0.049 |
0.118 |
0.037 |
0.36 |
1.9 |
41 |
0.032 |
0.09 |
0.24 |
0.2 |
4.5 |
42 |
0.041 |
0.094 |
0.029 |
0.31 |
2.2 |
43 |
0.028 |
0.07 |
0.18 |
0.26 |
3.8 |
44 |
0.035 |
0.084 |
0.021 |
0.36 |
2.2 |
45 |
0.021 |
0.05 |
0.21 |
0.36 |
3.2 |
46 |
0.028 |
0.195 |
0.037 |
0.8 |
4.8 |
47 |
0.03 |
0.082 |
0.04 |
0.41 |
2.7 |
48 |
0.04 |
0.118 |
0.049 |
0.36 |
1.5 |
49 |
0.04 |
0.076 |
0.03 |
0.28 |
2.4 |
Номер варианта курсовой работы определяется путем вычитания из двух последних цифр номера зачетной книжки студента числа кратного 50, но так, чтобы результат не превышал 49.
Для всех вариантов принять: ТП = 0.01 с, КДС = 1
3.2. Синтез корректирующего устройства
Синтез системы автоматического управления является основной стадией проектирования, сущность которой заключается в таком выборе структуры системы, ее параметров и технической реализации, при котором обеспечиваются требуемые показатели качества регулирования. Проектирование системы при регуляторных воздействиях осуществляется в следующем порядке:
1)на основании технических условий определяется неизменяемая часть системы, т. е. совокупность объекта управления (в нашем случае двигатель постоянного тока), усилителя мощности (тиристорный преобразователь), регулятора тока и измерительных устройств (датчики различных координат). Строятся ее логарифмические частотные характеристики;
2)по заданным показателям качества регулирования строятся желаемые логарифмические частотные характеристики разомкнутой системы;
3)выбирается тип корректирующего устройства;

57
4) выполняется собственно синтез и решаются задачи технической реализации корректирующего устройства.
В курсовой работе все элементы неизменяемой части задаются. Их описание, структура, параметры изучаются в курсах теории электропривода и управления электроприводами.
Учитывая то обстоятельство, что структура системы задана, (рис. 3.2) структурная схема при синтезе в общем виде может быть представлена следующим образом (рис. 3.3).
ω3(р) |
|
|
|
|
|
|
ω (р) |
||
|
|
|
|
|
|||||
|
WКУ(р) |
|
|
|
WНЧ(р) |
||||
|
|
|
|
|
|
||||
(-) |
|
|
|
|
|
|
|
||
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Здесь WКУ(р) – передаточная функция корректирующего устройства. Неизменяемая часть системы включает звенья, входящие в замкнутый контур
тока, т. е. WPT(р), WTП(р); WД1(р); WДТ(р), и звено объекта управления WД2(р). Корректирующее устройство (регулятор) описывается функцией WРС(р). Для
синтеза используется метод логарифмических частотных характеристик. Построение логарифмических амплитудных частотных характеристик (ЛАЧХ) ведется на основании асимптотических характеристик с использованием в необходимых случаях табличных поправок; логарифмические фазовые частотные характеристики (ЛФЧХ) строятся по формулам. Необходимые справочные материалы приведены в [1 - 11].
При построении характеристик замкнутого контура тока, входящего в неизменяемую часть системы, необходимо привести эту часть структурной схемы к виду, удобному для анализа, т. е. к схеме, состоящей из последова- тельно соединенных звеньев с единичной обратной связью. Для этого необ- ходимо провести структурные преобразования схемы. После построения ЛАЧХ и ЛФЧХ разомкнутого контура тока строятся характеристики замкну-того контура тока с использованием номограммы замыкания или (численно) на ЦВМ.
Номограммой замыкания [5, c. 286], [6, c. 524] пользуются следующим образом: а) построенные логарифмические амплитудную LPKT (ω) и фазовую ϕPKT(ω) частотные характеристики разомкнутой системы наносят на номограмму в виде кривой; б) наносят на эту кривую значения частот ω как параметр; в) в точках пересечения сплошных кривых номограммы с кривой частотной характеристики находятся значения амплитудной частотной характеристики приведенного замкнутого контура тока; в точках же пересечения со штриховыми кривыми определяются значения фазовой частотной характеристики приведенного замкнутого контура тока. В
58
дальнейшем, в случае необходимости, номограмму замыкания используют аналогичным образом. Для расчета частотных характеристик на ЦВМ могут быть использованы программы, входящие, например, в программное обеспечение MATLAB или MATKAD.
Окончательно характеристики неизменяемой части системы включают совокупность характеристик замкнутого контура тока W3KT(jω) и звена WД2(jω).
Важнейшим этапом синтеза является построение желаемой логарифмической амплитудной характеристики системы, которая определяет показатели качества и точности процессов регулирования. Поскольку исследуемая система – минимально – фазовая, связь между показателями качества переходной функции и видом желаемой логарифмической амплитудной частотной характеристики (ЛАЧХ) однозначна.
Низкочастотная часть желаемой характеристики обуславливает точность воспроизведения управляющего воздействия. Диапазон частот низкочастотной части характеристики ориентировочно заключен в пределах 0 p ω p ω Η , где ωН
берется из заданных показателей качества. Форма характеристики определяется требованиями астатизма.
Среднечастотная часть характеристики с наклоном – 20 дБ/дек имеет частотный диапазон в пределах ω Ηp ω p ω Β . Этот диапазон включает частоту
среза системы ω0. Среднечастотная часть желаемой ЛАЧХ определяет показатели качества замкнутой системы в динамических режимах.
Высокочастотная часть характеристики находится в пределах ω Βp ω p ∞ .
Эта часть характеристики не оказывает существенного влияния на показатели качества системы, поэтому для более простой реализации корректирующего устройства желаемая характеристика и ЛАЧХ неизменяемой части должны совпадать по форме.
В соответствии с методом логарифмических частотных характеристик по ЛАЧХ неизменяемой части и желаемой ЛАЧХ определяется ЛАЧХ последовательного корректирующего устройства (регулятора) и передаточная функция регулятора WРС (р).
Рис. 3.3
59
3.3.Исследование устойчивости и качества системы
3.3.1.Определение запасов устойчивости
Метод логарифмических характеристик дает возможность сравнительно просто исследовать устойчивость линейной системы. По частотным характеристикам можно также судить не только об устойчивости, но и о степени близости системы к границам устойчивости. Для этого обычно оценивают запасы по фазе и амплитуде.
Запасом устойчивости по фазе замкнутой системы называется максимально допустимое увеличение запаздывания по фазе на частоте среза, при котором система доходит до границы устойчивости.
Запасом устойчивости по амплитуде называется максимальное увеличение коэффициента усиления разомкнутой системы, при котором система доходит до границы устойчивости.
При проектировании автоматической системы рекомендуется иметь запас устойчивости по фазе не менее 300, а запас устойчивости по амплитуде – не менее 6 децибел.
В курсовой работе необходимо оценить устойчивость системы по разомкнутому контуру (желаемая ЛАЧХ), определив запасы по фазе и амплитуде. Логарифмическая фазо-частотная характеристика строится по полученной желаемой ЛАЧХ. При этом последняя представляется последовательным соединением типовых звеньев.
3.3.2. Построение реакции системы на возмущающее воздействие
Устойчивость является необходимым, но недостаточным условием работоспособности автоматической системы. Устойчивость системы регулирования гарантирует лишь затухание переходного процесса.
Качество линейной системы принято оценивать по виду переходного процесса. При этом за стандартный переходный процесс для линейной системы принимают ее реакцию на единичную ступенчатую функцию. Этот процесс называют переходной функцией h(t). По переходной функции определяют основные показатели качества (максимальное перерегулирование, число колебаний, временные характеристики), которые должны соответствовать заданным.
В данной работе предлагается построить переходную функцию на возмущающее воздействие iC (t) = 1(t) (структурная схема рис. 3.2).
Воздействие такого типа является характерным для электроприводов. Структурная схема системы при указанном условии представлена на рис.
3.4.
60
iC(р) |
|
|
|
|
|
ω (р) |
|
|
|
|
|
||
|
|
WД2(р) |
|
|||
|
|
|
|
|||
|
|
|
|
|
||
|
|
|
|
|
|
|
W −1 |
(p) |
WП−1 (p) |
PТ |
|
|
WPC(р)
Рис. 3.4
Частотные характеристики всех элементов структурной схемы (рис. 3.4) известны, поэтому переходная функция h(t) может быть построена на основании имеющейся связи между частотными характеристиками системы и переходными процессами в системе, когда на ее входе действует единичное ступенчатое воздействие 1(t), а начальные условия являются нулевыми.
Для построения переходной функции студенту предоставляется возможность выбрать любой из методов, изучавшихся в курсах ТОЭ и ТАУ. В частности, могут быть использованы аналитические методы из курса ТОЭ, графоаналитический метод трапецеидальных характеристик из курса ТАУ, численные методы расчета на ЦВМ по типовым программам, входящим в программное обеспечение персональных компьютеров.
Нахождение переходной функции |
методом |
|
|
трапецеидальных |
|||
|
|
2 |
∞ P |
sinω t |
|
|
|
характеристик сводится к вычислению интеграла h(t) = |
∫ |
(ω) |
|
dω, |
где |
||
π |
|
ω |
|||||
|
|
0 |
|
|
|
||
ход решения определяется способом представления вещественной частотной характеристики Р(ω).
В соответствии с заданием необходимо построить реакции системы на возмущающее воздействие для двух координат, а именно: i (t) и ω (t).
Последовательность построения в обоих случаях может быть следующей:
1)произвести необходимые преобразования структурной схемы (рис. 3.4), в результате которых входным воздействием системы являлся бы сигнал
iC (t), а выходным – в первом случае i(t), а во втором - ω(t);
2)построить суммарные ЛАЧХ и ЛФЧХ разомкнутой системы;
3)используя номограмму для определения вещественной характеристики замкнутой системы, определить Р(ω). Номограмму следует брать в [5, 6],
способ использования аналогичен указанному в разделе для номограммы замыкания;
4) разбить вещественную характеристику Р(ω) на необходимое число трапеций. Для каждой трапеции определить высоту Р0 (ω) , частоты ω0 и ωd и
наклон x = ωd ;
ω0