

Кулик А С Элементы теории рационального управления объектами
.pdf180 ГЛАВА VI. РАЦИОНАЛЬНОЕ УПРАВЛЕНИЕ РАБОТОСПОСОБНОСТЬЮ…
|
|
|
|
|
|
Wтг s |
Uтг s |
ктг , |
(6.6) |
||
s |
|
||||
|
|
|
|||
где ктг – коэффициент передачи.
В векторно-матричной форме преобразование изображений сигналов в ОРУ можно представить в следующей форме:
Uя |
s |
|
|
Wум s |
|
|
|||
|
U |
|
|
|
W |
s W |
s W |
Uу s . |
(6.7) |
|
тг |
s |
|
s |
|
||||
|
|
ум |
эд |
тг |
|
|
|||
В пространстве непрерывных состояний преобразование временных сигналов в ОРУ может быть представлено системой векторно-матричных уравнений:
x1 |
t |
|
|
0 |
||
|
|
кэд |
||||
|
|
|
|
|||
x2 t |
|
|
|
|||
|
|
|
||||
|
|
Т |
|
|||
|
|
|
|
эд |
||
|
|
|
|
|
|
|
u |
я |
t |
|
1 |
|
|
|
|
|
|
|||
uтг t |
|
0 |
|
|||
|
0 |
|
|
x1 |
t |
кум |
||
|
|
|
|
|||||
|
1 |
|
|
|
|
|
uy t |
|
|
|
|
x2 |
t |
|
0 |
|
|
Т |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
эд |
|
|
|
|
|
|
0x1 t .
ктг x2 t
; x1 t0 x10 ; x2 t0 x20 ;
(6.8)
Для перехода к описанию в пространстве дискретных состояний примем следующее предположение. Преобразование сигналов в функциональных элементах АЦП и ЦАП безинерционное с коэффициентами передачи, равными единице. Использование этого предположения позволит упростить последующее изложение особенностей рационального управления. При формировании дискретных уравнений воспользуемся формулой Эйлера:
x |
1 |
t |
x1 k 1 x1 k |
|
; x |
2 |
t |
x2 k 1 x2 k |
, |
(6.9) |
|
T0 |
T0 |
||||||||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
||||
где Т0 – период квантования.
После соответствующих преобразований получим следующую систему дискретных уравнений в векторно-матричной форме:
6.2 Математические описания номинального режима функционирования |
181 |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 |
k 1 |
|
|
1 |
|
|
0 |
|
|
|
x1 |
k |
к |
умT0 |
u |
|
|
x1 k0 x10 ; |
|
|
|||||
|
к |
|
T |
|
|
|
T |
|
y |
k ; |
|
|
|||||||||||||
|
|
|
|
|
эд 0 |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
x2 k0 x20 ; |
|
|
||
x2 |
k 1 |
|
|
|
1 |
|
|
|
|
x2 |
k |
|
|
0 |
|
|
|
|
(6.10) |
|
|||||
Т |
|
|
Т |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
эд |
|
|
|
эд |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
u |
|
k |
1 |
|
0 |
x |
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
я |
|
|
|
|
|
1 |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
uтг k |
0 |
ктг |
x2 |
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Проанализируем свойства управляемости и наблюдаемости ОРУ по |
|
||||||||||||||||||||||||
Калману. В соответствии с (2.6) сформируем матрицу R: |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
к умТ0 |
|
к умТ0 |
|
|
|
|
|
|||||
|
|
|
|
R |
b, Ab |
|
|
|
|
кэдк умT0 |
. |
|
(6.11) |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
эд |
|
|
|
|
|
|
|
Очевидно, что rang R = 2, следовательно, ОРУ полностью управляем. Далее сформируем матрицу наблюдаемости Q:
|
|
|
|
|
|
|
ктгкэдТ0 |
|
|
|||
|
|
1 0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Т эд |
|
|
|
|
||||
Q CT , CA |
|
|
|
|
|
|
|
|
. |
|
||
|
|
|
|
|
|
|
|
(6.12) |
||||
|
|
|
|
|
|
|
Т |
0 |
|
|
||
|
|
0 к |
|
0 |
к |
тг 1 |
|
|
|
|||
|
|
тг |
Тэд |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
В матрице Q два первых столбца линейно независимы, поэтому rang Q = 2, что означает полную наблюдаемость ОРУ.
Для анализа устойчивости ОРУ формируется характеристическое уравнение вида dim zI A 0 . Для ОРУ характеристическое уравнение будет таким:
|
|
T |
|
|
|
|
|
|
|
z 1 z 1 |
|
|
0 |
|
0 . |
(6.13) |
|||
|
|
||||||||
|
|
Tэд |
|
|
|
|
|
||
Из этого уравнения следует, что |
z |
|
1, а z |
2 |
1 |
T0 |
. Значение первого |
||
|
|
||||||||
|
1 |
|
|
|
|
Tэд |
|||
|
|
|
|
|
|
|
|
||
корня свидетельствует, что z1 находится на границе устойчивости. Второй корень z2 находится внутри круга единичного радиуса. Следовательно, ОРУ
182 ГЛАВА VI. РАЦИОНАЛЬНОЕ УПРАВЛЕНИЕ РАБОТОСПОСОБНОСТЬЮ…
не обладает свойством устойчивости в номинальном режиме функционирования. Для обеспечения устойчивого функционирования ОРУ в номинальном режиме необходимо, с использованием принципа управления по отклонению, сформировать соответствующий алгоритм управления, который реализуется в УРУ.
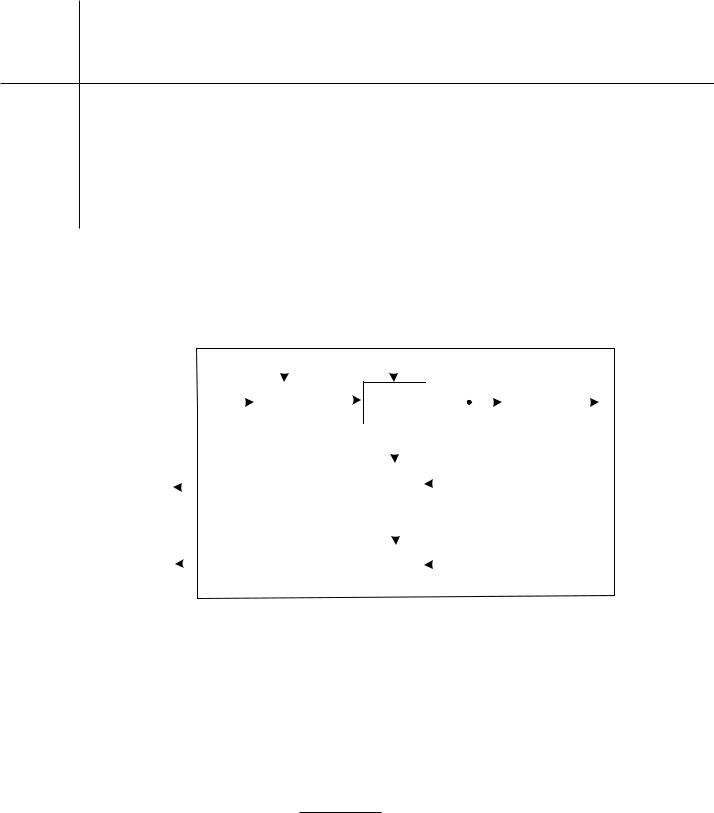
Представленная на рис. 6.7 функциональная схема ОРУ с избыточной связью не единственно возможная структура. К примеру, если для
измерения угловой скорости ω(t) использовать второй датчик, то можно сформировать новую функциональную схему ОРУ (рис. 6.9).
|
|
uy t |
|
|
D1 |
|
D2 |
t |
|
|
|
||||||
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
uя t |
|
|
|
mi t |
||||||||
|
|
|
|
|
|
|
|||||||||||
|
УМ |
ЭД |
М |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uтг1 t |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
ТГ1 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uтг2 t |
|
|
|
|
|
D4 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
ТГ2 |
|
|
|
|
|
ОРУ |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рисунок 6.9 – Функциональная схема ОРУ с избыточным функциональным элементом
В этой схеме D4 – множество видов дестабилизации ТГ2. Передаточные функции, описывающие связь изображений сигналов, можно представить так:
W1 |
s |
Uтг1 s |
|
к умкэдктг1 |
|||||
|
|
s Tэдs 1 |
|||||||
U yi s |
|||||||||
|
|
|
|||||||
Или в компактной форме |
|
|
|||||||
|
|
|
|
Uтг1 |
s |
|
|||
|
|
|
|
U |
|
s |
|||
|
|
|
|
тг 2 |
|
||||
|
|
|
|
|
|
|
|
||
; W2 |
s |
Uтг 2 |
s |
|
к умкэдктг 2 |
. |
(6.14) |
||
U yi s |
|
s Tэдs 1 |
|||||||
|
|
|
|
|
|||||
W1 |
s |
|
W |
s U yi s . |
(6.15) |
2 |
|
|
6.2 Математические описания номинального режима функционирования |
183 |
В пространстве непрерывных состояний связи переменных можно представить в следующей векторно-матричной форме:
x1 t |
|
|
0 |
|
1 |
|
|
|
x1 t |
|
0 |
|
x1 |
t0 |
x10 ; |
||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
1 |
|
|
|
|
|
кумкэд uy t ; |
|
t0 |
x20 ; |
|||
x2 t |
|
0 |
|
Т |
|
|
|
x2 |
t |
|
T |
|
x2 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
(6.16) |
||||
|
|
|
|
|
|
|
эд |
|
|
|
эд |
|
|
|
|||
uтг1 |
t |
|
ктг1 |
|
0 x1 |
t |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|||
uтг2 |
t |
|
ктг2 |
|
0 x2 |
t |
|
|
|
|
|
|
|||||
В пространстве дискретных состояний преобразовательные свойства ОРУ можно представить системой конечно-разностных уравнений вида:
x |
k 1 |
|
|
1 |
T0 |
|
|
x |
k |
|
0 |
|
x1 |
k0 x10 ; |
|
|
|
|
|
|
|
|
|
|
|||||||
1 |
|
|
|
|
T0 |
1 |
|
|
кумкэдT0 |
uy k ; |
|
k0 x20 ; |
|||
x2 |
k 1 |
|
0 |
1 |
Т |
|
|
x2 |
k |
|
T |
|
x2 |
||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
эд |
|
|
|
эд |
|
|
(6.17) |
|
uтг1 k |
|
|
|
|
|
x1 k |
|
|
|
|
|
||||
|
ктг1 |
0 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
k |
. |
|
|
|
|
|
|
uтг2 k |
|
ктг2 |
0 |
x2 |
|
|
|
|
|
|
|||||
Анализ полученной системы уравнений по критериям Калмана и Ляпунова свидетельствует о полной управляемости и наблюдаемости ОРУ в номинальном режиме функционирования, а также о неустойчивости в реакции на управляющее воздействие uy(k). Устойчивость ОРУ может быть обеспечена формированием соответствующего алгоритма управления в УРУ.
Управляющие моменты mi(t), развиваемые двигателями-маховиками (рис. 6.7, рис. 6.9), оказывают на космический аппарат различное влияние, зависящее от схемы установки. Так, для схемы установки приводов «куб» (рис. 6.4) управляющие моменты по осям связанной системы координат будут формироваться следующим образом:
|
|
|
|
|
|
|
|
m |
|
t |
1 |
0 |
0 |
mx |
t |
0 1 |
0 |
|||
|
|
y |
|
|
|
|
m |
z |
t |
0 |
0 |
1 |
|
|
|
|
|
|
|
|
sin 1 cos 1 sin 1 sin 1 cos 1
|
m |
t |
|
|
|
m12 |
t |
(6.18) |
|
|
|
|
. |
|
|
m |
3 |
t |
|
|
|
|
|
|
|
|
|
||
|
m4 |
t |
|
|
184 ГЛАВА VI. РАЦИОНАЛЬНОЕ УПРАВЛЕНИЕ РАБОТОСПОСОБНОСТЬЮ…
Для схемы установки приводов «пирамида» так:
mx t |
sin 2 sin 2 |
sin 2 sin 2 |
sin 2 sin 2 |
sin 2 cos 2 |
|
m1 |
t |
|
||||||||||||||||
|
|
|
|
|||||||||||||||||||||
my t |
|
cos 2 |
|
cos 2 |
|
cos 2 |
|
cos 2 |
|
m2 |
t |
. (6.19) |
||||||||||||
|
z |
|
|
|
|
2 |
|
2 |
|
2 |
|
2 |
|
2 |
|
2 |
|
2 |
2 |
|
m3 |
t |
|
|
|
t |
|
|
|
cos |
sin |
cos |
sin |
cos |
sin |
m |
|
t |
|
||||||||||
m |
|
|
sin |
|
|
|
|
|
|
|
cos |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Блок двигателей-маховиков, установленных по схеме «куб», может быть описан с помощью блочных матриц и векторов в дискретном пространстве состояний с использованием системы (6.17) в такой форме:
x1 kx2 kx3 kx4 k
1 |
|
A11 0 |
0 |
0 |
x1 k |
|
b1 0 |
0 |
0 |
uy1 |
k |
|
||||||||||||
1 |
|
|
|
|
|
|
|
|
|
x |
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
A |
|
0 |
0 |
2 |
|
0 b |
2 |
0 |
0 |
uy2 |
k |
|
||||||||||
|
|
|
|
|
22 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
|
|||
1 |
|
|
|
|
|
|
|
|
x3 |
k |
|
|
|
|
|
|
|
|
|
|||||
|
0 |
0 |
A33 |
0 |
|
|
0 |
0 b3 |
0 |
uy3 |
k |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(6. 20) |
1 |
|
0 |
0 |
0 |
A |
44 |
x |
4 |
k |
|
0 |
0 |
0 b |
4 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uy4 |
k |
|
|||
|
|
|
x |
|
k |
|
x |
|
k |
0 |
x |
3 |
k |
0 |
x |
4 |
k |
0 |
T |
x x |
20 |
x |
30 |
x |
40 |
T |
; |
|||||||||||
|
|
|
1 |
|
|
0 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
||||||||||||||
|
|
|
|
|
uтг |
k |
|
|
|
|
С11 0 |
0 0 |
x1 |
k |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
u |
|
k |
|
|
|
0 С |
|
|
0 0 |
|
x |
|
k |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
тг |
k |
|
|
|
|
|
22 |
|
|
|
|
|
|
|
2 |
|
, |
|
|
|
|
|
|
(6.21) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
uтг |
|
|
|
|
|
0 0 С33 0 |
|
x3 |
k |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
u |
тг |
k |
|
|
|
|
0 0 |
|
0 С |
|
x |
4 |
k |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
44 |
|
|
|
|
|
|
|
|
|
|
||||
где x |
i |
k x |
k 1 x |
2 |
k 1 |
T ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
1 |
T0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
к |
|
|
0 |
|
|
|
|
|
|
||||
|
|
|
T0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тг1 |
|
|
|
|
|
|
|||||||
Aii |
0 1 |
|
; bi |
|
кумкэдT0 |
|
; Сii |
|
|
|
. |
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
ктг2 |
0 |
|
|
|
|
|
|
||||||
|
|
|
эд |
|
|
|
|
|
|
|
|
|
|
эд |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Таким образом dim x k 8 блочной матрицы А-(8x8); блочной матрицы В-(8х4); блочной матрицы С-(8х8).
Итак, в этом параграфе представлены различные формы математического описания преобразовательных свойств в номинальном режиме для двух функциональных схем ОРУ.
6.3 Диагностическое обеспечение блока электромаховичных приводов |
185 |
|||||||
|
|
|||||||
6.3 Диагностическое обеспечение блока электромаховичных приводов |
|
|||||||
Диагностическое обеспечение состоит из диагностических моделей, |
|
|||||||
алгоритмов и программ, получаемых в результате решения задач сигнально- |
|
|||||||
параметрического диагностирования (рис. 3.2). |
|
|
|
|
||||
Опишем множества возможных дестабилизирующих воздействий для |
|
|||||||
функциональной |
схемы, |
представленной |
на |
рис. |
6.7. |
Множество |
|
|
D1={d11, d12, …, d16}, состоит из следующих видов отказов: d11 – уменьшение |
|
|||||||
коэффициента усиления УМ; d12 |
и d13 – соответственно положительный и |
|
||||||
отрицательный дрейфы; d14 и d15 – соответственно пробои положительного и |
|
|||||||
отрицательного |
плеча; |
d16 – |
обрыв |
входа. |
Для |
ЭД |
множество |
|
D2={d21 ,d22 ,…, d25} состоит из пяти таких видов отказов: d21 – уменьшение коэффициента передачи ЭД; d22 – увеличение момента сопротивления вращению ротора; d33 – увеличение постоянной времени; d34 – короткое замыкание в цепи управления; d25 – обрыв в цепи управления. Для ТГ выделим четыре дестабилизирующих воздействия D3={d31, d32, …, d34} следующих видов: d31 – уменьшение коэффициента передачи ТГ; d32 и d33 – положительный и отрицательный дрейфы, соответственно; d34 – обрыв сигнального привода.
Для обнаружения дестабилизации в блоке электромаховичных приводов согласно п. 3.2 требуется сформировать эталонные модели. Рассмотрим особенность формирования эталонной модели для i-го канала блока. Начнем с простейшей структурно подобной (3.1). Для функциональной схемы, представленной на рис. 6.7, будем для обнаружения дестабилизации использовать один вход uy(kT0) и один выход uтг(kT0). Связь между этими сигналами можно представить для эталонной модели в такой форме:
|
ˆ |
k 1 |
1 |
T0 |
|
|
|
ˆ |
k |
|
|
0 |
|
|
k ; |
|||||
x1 |
|
|
T |
|
|
x1 |
|
к |
T |
u |
|
|||||||||
|
ˆ |
|
|
|
|
0 1 |
|
0 |
|
|
ˆ |
|
|
|
c 0 |
|
y |
|
||
|
k 1 |
|
|
|
k |
|
|
|
|
|||||||||||
x2 |
|
|
Т |
эд |
|
x2 |
|
T |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
эм |
|
|
|
|||
uˆ |
тг |
|
k |
|
1 |
0 |
x1 |
k |
, |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
x2 |
k |
|
|
|
|
|
|
|
|
|
|
||
x1 k0 |
|
0 |
|
|
|
k0 |
|
|
; |
x2 |
|
0 |
(6.22) |
|
|
|
|
|
|
где кс=кумкэдктг. В более простой форме, удобной для программной реализации, можно представить в форме конечно-разностного уравнения:
186 ГЛАВА VI. РАЦИОНАЛЬНОЕ УПРАВЛЕНИЕ РАБОТОСПОСОБНОСТЬЮ…
u |
|
2 |
|
T |
|
|
|
T |
|
|
тг k |
к Т |
u y k ; u |
тг k0 |
0 . |
|
тг k 2 |
0 |
u |
тг k 1 |
0 |
1 u |
с 0 |
(6.23) |
|||||||||
ˆ |
|
|
|
Tэд |
ˆ |
Tэд |
|
ˆ |
|
Tэд |
ˆ |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||||||
|
Любая дестабилизация в ОРУ из множества D D1 D2 D3 |
(рис. 6.7) |
||||||||||||||
приводит или к изменению параметров в системе уравнений (6.10), или к «размытости» выходного сигнала uтг k .
Все такие изменения в ОРУ можно обнаружить с помощью следующего отклонения:
|
|
|
|
ˆ |
(6.24) |
||
uтг k 2 uтг k 2 uтг k 2 |
|||||||
при использовании простейшего предикатного уравнения вида |
|
||||||
z0 S2 |
|
uтг k 2 |
|
0 ; k |
|
; p0 0,9, |
(6.25) |
|
|
1,n0 |
|||||
где 0 – допуск на отклонение;
n0 – количество измерений на интервале диагностирования; p – коэффициент доверия.
В рассматриваемой функциональной схеме (рис. 6.7) выделены три фрагмента дестабилизации, а именно, УМ, ЭД и ТГ, на которые действуют соответствующие дестабилизирующие воздействия из множеств D1, D2 и D3 . Локализовать дестабилизированный УМ возможно, используя сигналы
uy kT0 и uум kT0 .
Для локализации этого фрагмента функциональной схемы можно использовать ДФМ в такой форме:
|
|
uум k 1 uум k T0 кумuу k , |
(6.26) |
||||
~ |
|
|
|
|
|
|
|
где кум кум кн – отклонение коэффициента передачи УМ. |
|
||||||
С использованием предикатного уравнения |
|
||||||
zим1 S2 |
|
uум k 1 |
|
1 ; k |
|
; p1 0,7 |
|
|
|
n0 , n1 |
(6.27) |
||||
можно локализовать дестабилизирующие воздействия из множества D1. Локализация фрагментов ЭД и ТГ, подверженных дестабилизирующим
воздействиям из множеств D2 и D3 возможна посредством использования

6.3 Диагностическое обеспечение блока электромаховичных приводов |
187 |
||||||||||||||||
|
|
|
|
||||||||||||||
ДФМ для соединения ЭД+ТГ. Так при дестабилизации ТГ прямым признаком |
|
||||||||||||||||
выберем |
~ |
|
|
тогда |
|
косвенный |
признак |
uтг k 1 |
будет |
|
|||||||
ктг ктг ктг , |
|
|
|||||||||||||||
определяться следующим выражением: |
|
|
|
|
|
|
|
|
|
||||||||
|
uтг k 1 |
|
T |
|
|
|
k |
T |
кэдuя k ктг . |
|
|
||||||
|
1 |
0 |
u |
|
0 |
(6.28) |
|
||||||||||
|
|
тг |
Tэд |
|
|||||||||||||
|
|
|
|||||||||||||||
|
|
|
|
|
Tэд |
|
|
|
|
|
|
|
|
|
|
||
При некоторых видах дестабилизации ЭД в качестве прямого признака |
|||||||||||||||||
|
|
|
|
~ |
Тэд , тогда уравнение ДФМ будет таким: |
||||||||||||
можно использовать Tэд Tэд |
|||||||||||||||||
|
|
T |
|
|
|
|
T |
|
|
|
Т |
0 |
|
|
|
|
|
u |
тг k 1 1 |
0 |
|
uтг k |
|
0 |
uтг k Тэд |
|
кэд |
ктг uя k Tэд |
. (6.29) |
|
|||||
|
|
2 |
|
2 |
|
||||||||||||
|
|
Tэд |
|
|
|
Tэд |
|
|
|
Тэд |
|
|
|
||||
Локализация дестабилизирующих воздействий из множеств в D2 или D3 в ряде практических случаев может быть осуществлена с использованием следующего предикатного уравнения:
|
|
|
|
|
|
|
k |
|||||
z |
имд1 |
S |
2 |
|
u |
тг |
||||||
|
|
|
2 |
|
|
|
|
|
|
|||
u |
|
k 2 |
|
1 |
T0 |
|||||||
|
|
|||||||||||
тг |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
Tэд |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
1 |
|
T |
u |
|
k u |
|
k 1 |
|
|
||||||||||||||
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тг |
|
|
|
|
у |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
Tэд |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(6.30) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k 1 |
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
u |
тг |
u |
у |
|
; |
k n |
,n |
2 |
; p |
2 |
0,7. |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При выполнении условия 2 |
|
|
|
в аргументе предиката zимд1=1, что |
||||
|
|
|||||||
означает дестабилизацию в ТГ, а при |
|
|
|
|
|
– z2=0, что свидетельствует о |
||
|
|
|
||||||
|
|
|
|
|
|
|
|
|
неработоспособности ЭД.
Для решения задачи определения типов дестабилизации требуется посредством параметризации элементов множеств D1, D2 и D3 сформировать типы. В результате параметризации видов дестабилизирующих воздействий УМ сформировано множество ум ум1, ум2 , ум3 , содержащее такие
типы: ум1 – тип, объединяющий виды дестабилизирующих воздействий
~ |
; |
ум2 – тип для видов d12, d13 |
с |
d11, d16 и характеризующийся параметром кум |
|||
параметром uум0 ; ум3 – тип дестабилизации, |
|
объединяющий виды d14, d15 |
и |
~ |
|
|
|
характеризующийся параметрами кум и u ум0 . |
|
|
|
188 ГЛАВА VI. РАЦИОНАЛЬНОЕ УПРАВЛЕНИЕ РАБОТОСПОСОБНОСТЬЮ…
Параметризация видов дестабилизирующих воздействий ЭД позволила |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
сформировать |
множество |
эд эд1, эд2 , эд4 |
|
|
|
|
|
|
следующих |
|
|
типов |
|
|
|||||||||||||||||||||||||||||||||||
дестабилизации: эд1 – тип для видов d21, d24 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
|
– тип с |
|
|
||||||||||||||||||||||
с параметром кэд ; эд2 |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
видом d22 |
и характеризующийся параметром |
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
– тип, совпадающий с |
|
|
|||||||||||||||||||||||||||||||
mc ; эд3 |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
видом d33 |
и описываемый параметром |
~ |
|
|
; |
эд4 – тип, включающий вид d25 с |
|
|
|||||||||||||||||||||||||||||||||||||||||
Tэд |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
параметром коб . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
В результате параметризации видов дестабилизирующих воздействий |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
ТГ сформировано множество |
тг тг1, тг 2 , содержащее такие |
типы: |
|
|
|||||||||||||||||||||||||||||||||||||||||||||
тг1 – тип, покрывающий виды d31 , d34 |
|
|
и характеризующийся параметром |
|
|
||||||||||||||||||||||||||||||||||||||||||||
~ |
– тип, включающий виды d32 , d33 |
с параметром uтг 0 . |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
ктг ; тг 2 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
Представим теперь уравнение ДФМ для типов дестабилизации УМ: |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
ум1 : uум k 1 uум k Т0 кумuу k ; |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
ум2 : uум k 1 uум k Т0uум0 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
ум3 : uум k 1 uум k Т0 кумuу k Т0uум0 . |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
Уравнение ДФМ для типов дестабилизации соединения ЭД+ТГ будут |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
иметь следующий вид: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
Т0 |
|
|
|
|
|
|
|
|
|
|
|
Т0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
эд1 |
: u |
тг |
k 1 1 |
|
|
|
u |
тг |
k |
|
|
к |
тг |
к |
эд |
u |
я |
k ; |
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тэд |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
Тэд |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
Т0 |
|
|
|
|
|
|
|
|
|
Т0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
эд2 |
: u |
тг |
k 1 1 |
|
|
|
u |
тг |
k |
|
к |
тг |
m |
c |
; |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тэд |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
Тэд |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
Т0 |
|
|
|
|
|
|
|
|
|
|
|
Т0 |
|
u |
|
|
|
|
|
|
|
|
|
|
|
|
k Т |
|
|
||||||||||
|
|
эд3 |
: u |
тг |
k 1 1 |
|
|
|
|
u |
тг |
k |
|
|
тг |
k |
к |
эд |
к |
тг |
u |
я |
эд |
; |
|||||||||||||||||||||||||
|
|
|
|
2 |
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
Тэд |
|
|
|
|
|
|
|
Тэд |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
ˆ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
эд4 : uтг k 1 uтг k 1 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
Т0 |
|
|
|
|
|
|
|
|
|
|
|
|
Т0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тг1 |
: u |
тг |
k 1 1 |
|
|
|
u |
тг |
k |
|
|
|
к |
тг |
к |
эд |
u |
я |
k ; |
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тэд |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
Тэд |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
Т0 |
|
|
|
|
|
|
|
|
|
|
Т0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
тг2 |
: u |
тг |
k 1 1 |
|
|
|
u |
тг |
k |
|
u |
тг0 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тэд |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
Тэд |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Для обеспечения условий диагностируемости типов дестабилизации с помощью представленных ДФМ требуется произвести анализ структурных и
6.3 Диагностическое обеспечение блока электромаховичных приводов |
189 |
сигнальных свойств с помощью соответствующих критериев, затем с использованием ДЛМ и процедур оптимизации сформировать оптимальную совокупность булевых признаков для дихотомической структуры поиска типов. Выполнив эти процедуры, получим каноническую совокупность признаков типов дестабилизации. Приведем описание некоторых признаков. Так, для определения трех типов дестабилизации УМ можно использовать два булевых признака такой структуры:
zумд1 |
S2 |
1 |
|
uум k 1 uум k u у k 1 u ум k 2 u ум k 1 u y k |
|
|
; |
|
|
||||||
|
|
|
|
|
|
|
|
k n1, n2 ; p 0,8;
zумд2 S2 1 uум k 2 2 u ум k 1 u ум k ; k n2, n3 ; p 0,8.
Для определения в ЭД типа дестабилизации эд1 можно использовать следующее предикатное уравнение:
|
|
|
|
|
|
|
|
|
|
|
|
u |
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
k u |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
z |
'эдд1 |
S |
2 |
|
тг |
k 1 1 |
|
|
0 |
|
|
u |
тг |
я |
k 1 |
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
Tэд |
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
k 2 |
|
|
|
|
|
|
k 1 u |
|
|
; |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
u |
тг |
1 |
|
0 |
|
u |
тг |
я |
|
k n , n |
2 |
; p 0,8, |
|
|||||||||||||||||||||||||||||
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Tэд |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
а для типа дестабилизации эд2 |
такое уравнение: |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
zэдд2 S2 |
2 |
|
|
|
uтг |
k 2 |
2 |
|
|
|
uтг k |
1 1 |
0 |
|
uтг k |
|
|
; |
||||||||||||||||||||||||
Тэд |
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Tэд |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
k n2, n3 |
; p |
|
0,8. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Следующая основная задача диагностирования после определения типов – это идентификация видов дестабилизирующих воздействий. Для множества дестабилизирующих воздействий для ЭД – множество D2, тип αэд2 совпадает с видом d22, тип αэд3 – это вид d33, а тип αэд4 означает вид d25. Для других типов дестабилизации ОРУ требуется решить задачи формирования процедур идентификации видов дестабилизирующих воздействий. Ключевым моментом при этом для рассматриваемой функциональной схемы ОРУ (рис 6.7) представляется формирование предикатных уравнений. Приведем ряд таких уравнений. Так, для идентификации таких видов