Лекция 12
Движение второго рода
(меняет ориентацию пространства)
|
Виды движения |
Определение преобразования |
Обозначение |
Изображение |
Формулы преобразования |
Элементы, определяющие преобразование |
Неподвижные точки |
Неподвижные прямые |
Неподвижные плоскости |
|
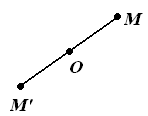
Центральная симметрия |
преобразование пространства, при котором каждая точка пространства отображается на симметричную ей точку относительно центра симметрии |
ZO |
ZO(M)=M' |
Если О(0,0,0): x' = -x y' = -y z' = -z |
центр симметрии |
центр симметрии |
всякая прямая, проходящая через центр симметрии |
всякая плоскость, проходящая через центр симметрии |
|
Если О(a,b,c): x' = 2a - x y' = 2b - y z' = 2c - z |
||||||||
|
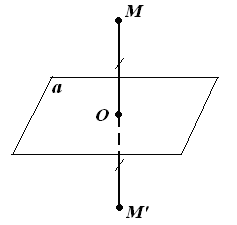
Симметрия относительно плоскости (зеркальное отражение) |
преобразование пространства, при котором каждая точка пространства отображается на точку, симметричную ей относительно данной плоскости |
Sα |
MO=OM' MM'
|
α=(XOY) x' = x y' = y z' =-z |
плоскость симметрии α |
все точки плоскости |
все прямые, принадлежащие плоскости α, или перпендикулярные ей |
плоскость симметрии α и всякая плоскость, перпендикулярная плоскости α |
|
α=(XOZ) x' = x y' =-y z' = z |
||||||||
|
α=(YOZ) x' =-x y' = y z' = z |
||||||||
|
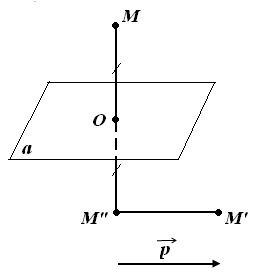
Скользящая симметрия |
преобразование пространства,
представляющее собой композицию
симметрии относительно плоскости α
и параллельного переноса на вектор
|
|
|
α=(XOY) x' = x+ p1 y' = y+ p2 z' =-z + p3 |
плоскость α и вектор
параллельного переноса
|
нет |
всякая прямая, лежащая
в плоскости α и параллельная
вектору
|
плоскость симметрии
α и всякая плоскость,
перпендикулярная плоскости α
и параллельная вектору
|
|
α=(XOZ) x' = x + p1 y' =-y + p2 z' = z + p3 |
||||||||
|
α=(YOZ) x' =-x+ p1 y' = y + p2 z' = z + p3 |
||||||||
|
Зеркальный поворот |
преобразование пространства, представляющее собой композицию поворота вокруг оси l на угол φ и симметрии относительно плоскости α, перпендикулярной этой оси
|
|
M |
α=(XOY), a=OZ
|
плоскость симметрии α, ось поворота l и угол поворота φ |
точка пересечения оси поворота l и плоскости симметрии α |
ось поворота l |
плоскость симметрии α |
|
α=(XOZ), a=OY
|
||||||||
|
α=(YOZ), a=OX x' =-x
|
 M
M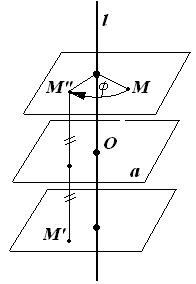
Движение первого рода
(сохраняет ориентацию пространства)
|
Виды движения |
Определение преобразования |
Обозначение |
Изображение |
Формулы преобразования |
Элементы, определяющие преобразование |
Неподвижные точки |
Неподвижные прямые |
Неподвижные плоскости |
|
Тождественное преобразование |
преобразование пространства, которое каждую точку пространства отображает на себя |
Е |
E(M)=M |
x' = x y' = y z' = z |
- |
любая точка |
любая прямая |
любая плоскость |
|
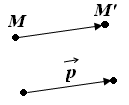
Параллельный перенос |
преобразование
пространства, при котором всякая точка
М отображается на точку М', так
что выполняется векторное равенство:
|
|
|
x' = x+ p1 y' = y+ p2 z' = z + p3 |
вектор
|
нет |
всякая прямая,
параллельная вектору
|
всякая плоскость,
параллельная вектору
|
|
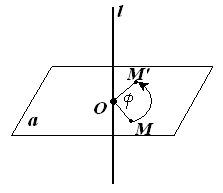
Поворот вокруг оси |
преобразование пространства, при котором каждая точка ориентированной прямой – оси поворота l – остается неподвижной, и в любой плоскости, перпендикулярной прямой l, индуцируется (возникает) поворот этой плоскости на угол φ вокруг точки пересечения ее с прямой |
|
|
l=OZ
z' = z |
ось поворота l и угол поворота φ |
каждая точка оси поворота |
ось поворота |
всякая плоскость, перпендикулярная оси поворота |
|
l=OY
y' = y
|
||||||||
|
l=OX x' = x
|
||||||||
|
Осевая симметрия |
преобразование пространства, при котором каждая точка пространства отображается на точку, симметричную ей относительно прямой l
(эквивалентно повороту вокруг оси l на угол, равный 1800) |
Sl |
|
l=OZ
z' = z |
ось симметрии l |
каждая точка оси симметрии |
ось симметрии |
всякая плоскость, перпендикулярная оси симметрии |
|
l=OY
y' = y
|
||||||||
|
l=OX x' = x
|
||||||||
|
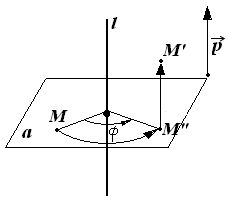
Винтовое движение |
преобразование
пространства, представляющее собой
композицию поворота вокруг оси l
на угол φ и переноса на вектор
|
|
M |
l=OZ
z' = z + p3 |
ось поворота l, угол поворота φ и вектор параллельного переноса
|
нет |
ось поворота l |
нет |
|
l=OY
y' = y + p2
|
||||||||
|
l=OX x' = x + p1
|