

Начертательная геометрия(краткий курс лекций)_Красильникова_Кокорин_Иванова
.pdfЗадача 13
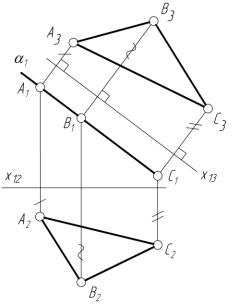
Преобразовать плоскость (А, В, С) общего положения в проецирующую (рис. 88).
Исходя из определения проецирующей плоскости, дополнительная плоскость проекций 3 должна быть перпендикулярна прямой, принадлежащей этой плоскости. Учитывая, что дополнительная плоскость перпендикулярна 1 или2, 3 выберем перпендикулярно фронтали или горизонтали плоскости соответственно.
Возьмем плоскость 3 перпендикулярно горизонтали h плоскости . Очевидно, что при этом плоскость 3 будет перпендикулярна горизонтальной плоскости проекций, а на плоской модели ось x23 - перпендикулярна h2 ( рис. 88).
Рис. 88
Алгоритм решения
1.Построим горизонталь h (h1, h2) плоскости (А, В, С).
2.Проведем ось x23 перпендикулярно проекции h2.
3.Определим проекции горизонтали h и точки A в
дополнительном поле проекций 3 — совпавшие проекции С3, D3 и проекция A3.
81
5. Через точки A3 и С3(D3) проведем прямую ( 3) — вырожденную проекцию плоскости .
Вновой системе плоскостей ( 2- 3) плоскость преобразуется
впроецирующую плоскость.
Используя это преобразование можно измерить угол ( ) между плоскостью общего положения ( ) и плоскостью проекций 2. Для определения угла между плоскостью общего положения и плоскостью 1 дополнительную плоскость 3 нужно задать перпендикулярно фронтали плоскости и выполнить аналогичные преобразования.
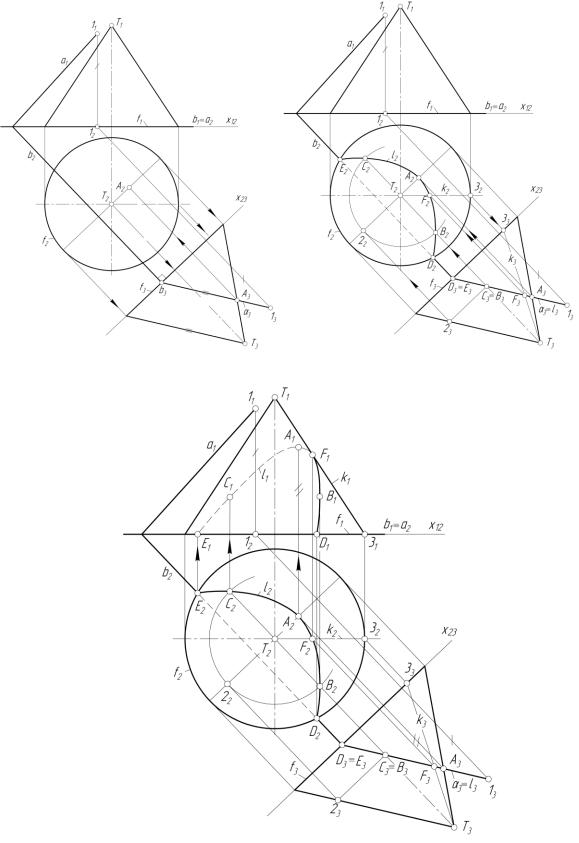
На рисунке 89 приведен пример использования способа ДОП для построения линии пересечения поверхности общего положения F (T, f) с плоскостью общего положения (a,b). Преобразование плоскости общего положения в проецирующую позволит в данной задаче определить характер линии пересечения и точно построить ее экстремальную точку.
Для преобразования плоскости в проецирующую определим3 перпендикулярной горизонтали b плоскости , следовательно, на плоской модели ось x23 будет перпендикулярна b2. При таком преобразовании чертежа очерк конической поверхности в поле 3 будет таким же, как и в поле 1 (рис. 89, а). По проекциям конической поверхности и плоскости в поле 3 видно, что сечение представляет собой параболу с вершиной в точке A.
Далее, в системе плоскостей ( 2- 3) строим горизонтальную проекцию l2 параболы l — рис. 89, б. При построении фронтальной проекции l1 (рис. 89, в) используем расстояния от оси x23 до соответствующих проекций точек линии сечения в поле 3. Проекцию F1 точки изменения видимости параболы при проецировании на плоскость 1 определим на фронтальном очерке k1 конической поверхности.
82
а) |
б) |
с) Рис. 89
83
Задача 14
Преобразовать проецирующую плоскость (А, В, С) в плоскость уровня.
Рис. 90
Исходя из определения плоскости уровня, дополнительная плоскость проекций 3 должна быть параллельна плоскости . Так как плоскость по условию задачи является фронтальнопроецирующей (рис. 90), очевидно, что плоскость 3 будет перпендикулярна фронтальной плоскости проекций, а на плоской модели ось x13 — параллельна 1.
Алгоритм решения
1.Проведем ось x13 параллельно проекции 1 на произвольном расстоянии от нее.
2.Определим проекции A3, B3 и С3 точек A, B и С в
дополнительном поле проекций 3 в соответствии с рис. 83.
В новой системе плоскостей ( 1- 3) плоскость преобразовалась в плоскость уровня. По проекции треугольника в поле 3 можно определить все его метрические характеристики.
Это преобразование используется в практике черчения для построения натуральной величины наклонного сечения детали. На
84
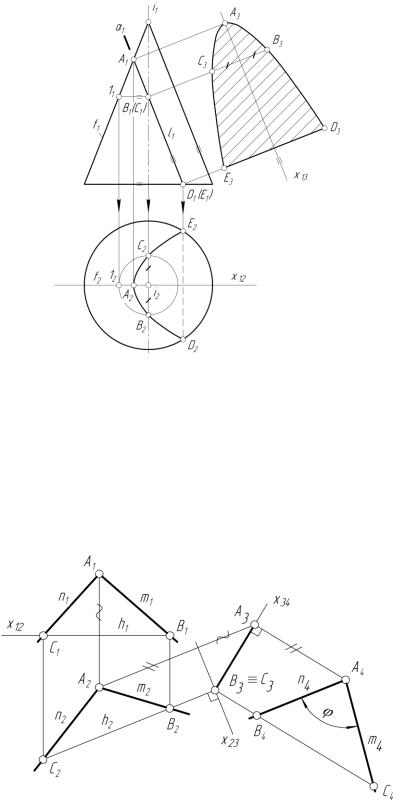
рисунке 91 приведен пример построения натуральной величины ортогонального сечения прямого кругового конуса плоскостью .
Рис. 91
Преобразование плоскости общего положения в плоскость уровня осуществляется в два этапа. На первом этапе плоскость общего положения преобразуется в проецирующую (задача 13). Затем, при введении еще одной дополнительной плоскости — 4 , проецирующая плоскость преобразуется в плоскость уровня
(задача 14).
Рис. 92
85
На рис. 92 приведен пример преобразования плоскости общего положения в плоскость уровня. Используя это преобразование можно определить угол между пересекающимися прямыми m и n.
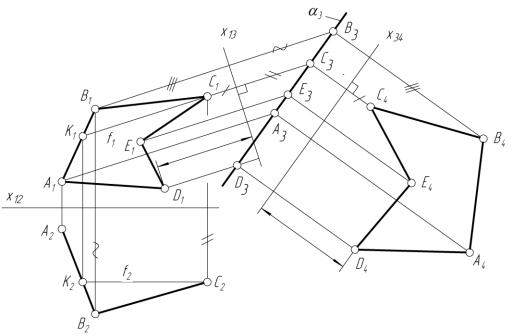
Если плоскость общего положения будет задана некоторой фигурой (А, В, С, E, D) (рис. 93), то подобное преобразование позволит определить размеры и форму плоской фигуры.
Рис. 93
Рассмотрим пример использования способа ДОП для построения горизонтальной проекции окружности t по ее вырожденной фронтальной проекции t1 и проекции t3 (рис. 94).
Так как плоскость окружности по условию задачи является фронтально-проецирующей, очевидно, что на плоской модели ось x13 будет параллельна t1.
В качестве оси отсчета x13 возьмем прямую, проходящую через центр окружности t3, а ось отсчета x12 в произвольном месте чертежа (рис. 95). Для построения горизонтальных проекций точек окружности измерим расстояния от оси x13 до проекций точек в поле 3 и отложим эти расстояния на соответствующих линиях проекционной связи от оси x12.
86
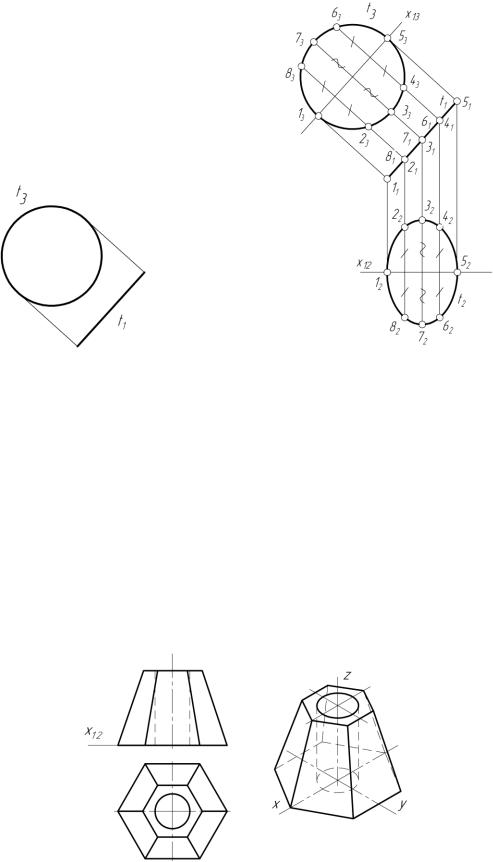
Рис. 94 |
Рис. 95 |
9. АКСОНОМЕТРИЧЕСКИЕ ПРОЕКЦИИ
Аксонометрические проекции наряду с эпюром Монжа являются частным вариантом метода двух изображений, получившим широкое распространение в практике технического черчения. Аксонометрические проекции служат для получения наглядных изображений, дающих более полное представление о конструкции изображаемых объектов (рис. 96).
Рис. 96
87
9.1. Аксонометрические проекции как частный случай метода двух изображений
Аксонометрические проекции, как частный случай метода двух изображений, получаются при использовании следующего аппарата проецирования.
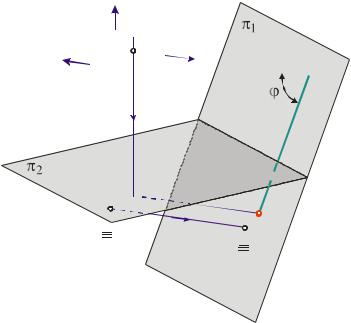
Плоскости π1 и π2 образуют произвольный, в частности - прямой угол (рис. 97). При проецировании на плоскость π1 используется параллельное проецирование, как косоугольное, так и ортогональное. При проецировании на плоскость π2 используется только ортогональное проецирование.
8 S2
8 |
А |
S1 |
|
 А1
А1
A2 
|
|
A21 |
B B2 |
B1 |
B21 |
|
Рис. 97
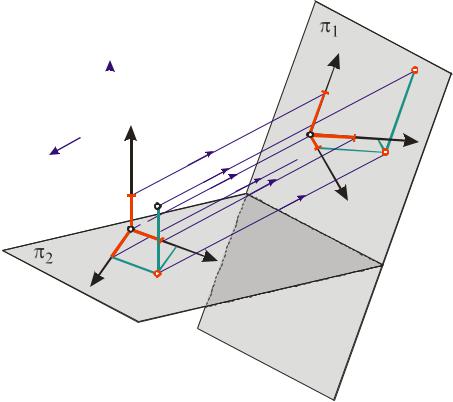
Рассмотрим построение аксонометрической проекции некоторой произвольной точки пространства А. В результате проецирования точки А на плоскости π1 и π2 получим соответственно проекции А1 и А2. Для перехода к одной картинной плоскости точку А2 дополнительно проецируем на плоскость π1 из центра S1. В результате проецирования точки А2 на плоскость π1 получим точку А21, т.е. проекцию точки А2 на плоскость π1. Таким образом, плоской аксонометрической моделью точки А является
88
пара точек А1 – А21. Точка А1 называется главной (первичной) аксонометрической проекцией точки А, точка А21 – вторичной проекцией.
Обратим внимание на построение аксонометрической проекции точки В, принадлежащей плоскости проекций π2. Если точка В принадлежит плоскости π2, то проекция точки В1 совпадает с точкой В и, как следствие, главная и вторичная проекции точки В совпадают (В1 ≡ В21).
Для решения метрических задач в аксонометрии исходную точку пространства А свяжем с Декартовой системой координат Oxyz, расположенной так, что плоскость Oxy принадлежит плоскости π2 (рис. 98). Затем проецируем исходную систему координат совместно с точкой А на аксонометрическую плоскость проекций π1. Обратим внимание, что начало координат (точка О) и координатные оси x и y принадлежат плоскости проекций π2, следовательно, их главные и вторичные проекций совпадают т.е.
О1 ≡ О21, x1 ≡ x21, y1 ≡ y21.
Главной аксонометрической проекцией оси z будет некоторая прямая линия z1, вторичная же проекция - z21 совпадает с проекцией О1 начала координат.
Построение аксонометрической проекции точки А в аксонометрической проекции Декартовой системы координат O1x1y1z1 включает в себя два этапа:
-построение вторичной проекции А21 точки А, используя одну из ортогональных проекций.
-построение главной аксонометрической проекции А1 (восстановление по вторичной проекции), используя третью координату точки А.
Необходимо отметить, что вторичные проекции могут быть горизонтальными, фронтальными и профильными, и их
использование зависит от удобства построения каждого
89
конкретного чертежа. Так, например, на рисунке 98 используется горизонтальная вторичная проекция.
В исходной системе координат определим единичные отрезки по каждой оси – Еx, Ey, Ez. В аксонометрической системе координат проекциями единичных отрезков являются отрезки Еx1, Ey1, Ez1.
|
8 |
|
|
|
|
|
S2 |
|
8 |
|
|
S1 |
|
z |
Ez
O;O2 Z
Ex
Xx;x2
|
Zz1 |
|
|
Ez1 |
А1 |
|
O1 Zz21 Ey1 |
Yy1 |
|
Ex1 |
A21 |
А |
|
|
Xx1 |
|
|
|
|
z2
Ey |
Yy;y2 |
A2 |
Рис. 98
Искажения по аксонометрическим осям определяются
коэффициентами искажения, равными отношениям длин аксонометрических единичных отрезков к натуральным масштабным единицам по соответствующим осям:
Kx = Еx1 / Еx |
Ky = Ey1 / Ey |
Kz = Ez1 / Ez . |
9.2. Теорема Польке
При построении аксонометрических изображений необходимо знать, насколько произвольно могут быть выбраны аксонометрические оси и аксонометрические единичные отрезки.
90