

tmmivan
.pdf104
На плане положений механизма (рис. 5.1.) нормальная составляющая ускорения точки Д направлена от точки Д к центру вращения (опоре) О3.
Поскольку точка О3 на плане ускорений соответствует полюсу, то вектор ānДО3 на плане ускорений откладывается от полюса π .
Линия действия вектора āτДО3 проводится через конец вектора ānДО3 перпендикулярно ему.
Решением системы уравнений движения точки Д является пересечение на плане ускорений л.д. āτДС и л.д. āτДО3 определяющее положение точки d, а вектор, проведённый из полюса πd, является вектором абсолютного ускорения точки Д.
Абсолютное ускорение точки Е звена 5 для которого определены
|
|
a |
Д |
= |
О Д |
|
|
ускорения двух точек: О3 |
и Д вычисляется из пропорций |
|
|
3 |
; |
||
|
Е |
О3Е |
|||||
|
|
|
a |
|
|
||
где О3Д и О3Е длины отрезков звена 5а на плане положений (рис. 5.1.).
Направления ускорений āД и āЕ совпадают по направлению и обозначают на плане ускорений фигуру πde , подобную фигуре О3ДЕ на плане положений.
Численные значения ускорений точек механизма полученных графически в виде векторов на плане ускорений вычисляются через масштаб плана ускорений.
При этом, поскольку в последующем этапе проектирования машины – расчёте на прочность для оценки сил инерции звеньев необходимо знать ускорения центров их масс, то на плане положений рассчитываются и обозначаются центры масс подвижных звеньев (обо-
105
значенные буквой S), из подобия находятся соответственные точки на плане ускорений, из полюса к этим точкам проводятся вектора ускорений центров масс и через масштаб вычисляются значения ускорений.
āτВА = aτВА · µa = 168 · 0.2 = 33.6 м/с2
ānДО3 = АВ · µa = 170 · 0.2 = 34 м/с2 āτДО3 = πc · µa = 139 · 0.2 = 27.8 м/с2
āД = aτДО3 · µa = 169 · 0.2 = 33.8 м/с2 āЕ = πd · µa = 176 · 0.2 = 35.2 м/с2 ānВА = πe · µa = 410 · 0.2 = 82 м/с2
āС = πB · µa = 81 · 0.2 = 16.2 м/с2
106
6. Силы трения в механизмах машин
Взаимодействие технических объектов, физических тел, а так же взаимодействие человека с физическими телами сопровождается рассеиванием (потерей) механической энергии. Эти потери обусловлены действием сил трения. Сила, препятствующая перемещению одного тела по поверхности другого называется силой трения.
Доля потерь энергии в машинах составляет до 33% затрачиваемой энергии, что обязывает учитывать силы трения при проектировании машин. При этом, эффективность расчета машины, а следовательно и самой машины зависят от конструктивного решения, связанного с преодолением тех составляющих сил трения, которые преобладают в каждой из кинематических пар машины.
6.1. Значение и роль сил трения в технике.
Парадоксальность сил трения заключатся в том, что силы родственные по природе в одном случае являются желаемыми, а в другом представляют вредное явление. В обоях случаях пренебрежение этим фактором снижает существенно эффективность машины. Например, трение в подшипниках и поршня о цилиндр в двигателе автомобиля, трение в деталях трансмиссии является вредным и приводит к потере до 30% энергии, вырабатываемой двигателем. В то же время трение между колесами тoгoже самого автомобиля и поверхностью дороги является необходимым условием функционирования автомобиля, как машины, поскольку эта силы определяют величину тягового усилия
107
при трогании, разгоне и буксировке, а так же величину силы тормо-
жения при остановке.
Водном случае силы трения оказывают влияние на потери энергии в машине, т.е. на ее эффективность, экономичность, в другом влияют на безопасность движения, функциональную эффективность.
Пример с винтовыми парами (соединение винта с гайкой) подтверждает двойственный характер сил трения.
Так, в большинстве случаев, винтовые пары применяются для крепежных целей (неподвижного соединения деталей), где, чем выше силы трения, тем надежнее само соединение. В тоже время винтовая пара в случае использования ее, как преобразователя поступательного движения во вращательное (детская игрушка "юла", винтовые дрели и винтовые гайковерты), тем эффективнее, чем меньше силы трения.
Вбольшинстве случаев сила трения в технических объектах определяется сочетанием нескольких составляющих, величина и значение каждой из которых различна.
Анализ уровня каждой из этих составляющих и её значимости позволяет уже на стадии проектирования машины заложить такие конструктивные решения, которые сделают ее наиболее эффективной
вработе.
Характерные виды трения, имеющие место при работе машин, и расчетные случаи для кинематических пар, работающих с трением, представлены в таблице 6.1.

108
Рис. 6.1

109
Существование сил трения обусловлено двумя причинами:
1.Зацеплением микронеровностей соприкасаемых поверхностей и их деформации при относительном перемещении. Эта причина является преобладающей в большинстве кинематических пар механизмов машин, где поверхности деталей подвергнуты традиционной механической обработке (фрезерованию, точению, шлифовке).
2.Силами межмолекулярного притяжения (адгезией) соприкасаемых тел. Эта причина проявляет себя при очень высоком качестве обработки соприкасаемых поверхностей (суперфи-
ниш и полировка).
Внутреннее трение- это сопротивление деформации рабочих тел, сопровождаемое необратимым рассеянием энергии. Сила внутреннего трения имеет направление, противоположное вектору скорости деформации (перемещения) рабочего тела.
Рис. 6.2. Расчетная схема проявления внутреннего трения.
Внешнее трение- это сопротивление относительному перемещению соприкасающихся и прижатых друг к другу тел, обусловленное: 1. деформацией и разрушением микронеровностей на соприкасающихся поверхностях рабочих тел и 2. агдезией (прилипанием).
110
Рис. 6.3. Расчетная схема проявления внешнего трения.
На расчетной схеме (рис. 6.2.) тела прижаты друг к другу силой Fn, направленной по нормали к плоскости соприкосновения (поверхности трения).
Внешнее трение сухое характеризуется отсутствием на поверхности трения постороннего материала, в том числе и газа при повышенном давлении.
Внешнее трение со смазкой подразумевает наличие на поверхности трения:
1 твердой смазки (графит, тальк).
2жидкостей, включая воду, масел, в том числе загущенных или растворов минеральных ископаемых (глины).
3газообразной прослойки, исключающей соприкосновение элементов кинематической пары.
При этом внешнее трение со смазкой подразделяется на трение в парах с:
1. Гидростатической подачей смазки в зону трения элементов кинематической пары под давлением от 3 до 200 МПа (рис. 6.3.а), например подшипники валов турбин, суппорты тяжелых металлообрабатывающих станков.

|
111 |
а |
б |
|
Подвод
смазки
Подвод смазки
Рис. 6.4. Пара скольжения с гидростатической и гидродинамической смазкой
2. Гидродинамической подачей жидкой смазки в зону трения и сопровождаемое при значительных относительных скоростях движения элементов кинематических пар аквапланированием (всплыванием) одного из них (рис. 6.3.б) например аквапланирование рулевых колес автомобиля при движении с большой скоростью по мокрой дороге, что приводит к потере сцепления колеса с дорогой и нарушению управляемости автомобиля.
Трение покоя характеризует силовое взаимодействие в паре скольжения, при котором еще не происходит относительного перемещения на поверхности трения (рис. 6.4.).
Трение движения характеризует силовое взаимодействие в паре скольжения, при относительном перемещении элементов кинематической пары (рис. 6.4.).

112
|
|
|
|
|
|
|
|
|
|
|
Зона покоя |
|
Зона трения скольжения |
|
|
|
|
|
|
|
|
|
|
|
Рис. 6.5. Характер перехода силы трения из зоны покоя в зону скольжения.
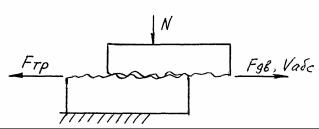
Рис. 6.6. Трения скольжения по горизонтальной поверхности
При движении одного тела по поверхности другого, прижатых друг к другу, например, силой тяжести G (рис. 6.5.) под действием движущей силы Fдв возникает сила сопротивления движению- Fтр, которая с нормальной реакцией N определяет в паре трения величину результирующей – R, отклоненной от нормали на угол трения φ.
Fтр |
= tgϕ |
откуда |
F = tgϕ × N |
|
|||
N |
|
тр |
|
|
|
||
113
Угол трения – φ это угол характеризующий соотношение сил трения и нормальной давления в кинематической паре и заключенный между нормалью к поверхности трения в точке контакта и результирующим вектором от силы трения и нормального давления.
Поскольку Fтр = f × N где ѓ- коэффициент трения скольжения, то из сравнения с предыдущей формулой следует, что тангенс угла трения является графической интерпретацией коэффициента трения скольжения (представляет собой справочную характеристику, учитывающую материалы пары трения, характер их поверхностей, условия смазки и др.).
Поверхность, образованная вращением результирующей силы вокруг нормали называется конусом трения.
Трение скольжения по наклонной поверхности.
На тело, находящееся на наклонной поверхности (рис. 6.6.) с одной стороны действует сила тяжести G, вызывающая скатывающую силу- Fск и силу нормального давления на поверхность N/.
С другой стороны (от наклонной плоскости) на тело действует реакция самой поверхности N//, совпадающая по точке приложения и величине с силой нормального давления N/. Так как угол трения φ- характеризует свойства пары трения, то его конкретному значению и определенной величине реакции поверхности соответствует результирующая R (от реакции поверхности N// и силы трения) и ее составляющая сила трения Fтр.