

Учебное_пособие
.pdfбаза, двойная направляющая. Тогда в отверстии Б располагается одна точка (опорная база), которая реализуется коротким пальцем 2. На плоскости В располагается одна точка (опорная база), которая реализуется малой площадью контакта с опорой пальца 1. Между плоскостью В и опорой пальца 2 должен быть зазор S.
Рассмотрим теоретическую схему базирования для примера аналогичного варианту, представленному на рис. 1, б.
Изображение такой теоретической схемы базирования детали на координатные плоскости Х'Y'Z' декартовой системы координат представлено на рис. 2. Корпусная деталь, выполненная в объемном изображении, базируется комплектом баз, состоящим из плоскости Б и двух отверстий N и M. Плоскость Б является главной базой, лишает деталь трех степеней свободы - одного перемещения вдоль оси Z (т. 1) и двух вращений вокруг оси Y (т. 2) и оси X (т. 3). Реализуется эта явная установочная (главная) база опорами (штырями) 1, 2, 3. Вид в плане на координатную плоскость Х'О'Y' изображает эту базу символом опорной точки ( ◊ ) с соответствующими номерами. В проекции на плоскость Х'О'Z' главная база Б символизируется теми же опорными точками, но уже как вид сбоку ( ). И аналогичная символика изображения главной базы как вид сбоку ( ) имеет место в проекции на плоскость Y'O'Z'. На эту плоскость проектируются виды в сечении АСР и ВВ. Отверстие N принято за первую дополнительную базу и лишает деталь двух степеней свободы, а именно перемещений вдоль двух координатных осей Х (т. 5), Y (т. 4). Это двойная опорная явная база символизируется опорными точками в проекции на плоскость Х'О'Y' как вид сбоку. Реализуется эта база коротким цилиндрическим пальцем. В проекции на плоскость Х'О'Z' эта двойная опорная база обозначается также опорными точками 4, 5, но символ опорной точки 4 представлен как вид в плане ( ◊ ), а для точки 5 как вид сбоку. В проекции на плоскость Z'O'Y' (сечение АСР) символика этой базы зеркально поменялась, а именно точка 4 представлена как вид сбоку, а точка 5 - вид в плане. Отверстие М принято за вторую дополнительную базу и лишает деталь последней шестой степени свободы - вращения вокруг вертикальной оси Z (т. 6),
40
реализуется срезанным пальцем. Символизируется эта опорная явная база на плоскости Х'О'Y' как вид сбоку ( ). На плоскость Z'O'Y' в сечении ВВ (диаметральная плоскость отверстия М) также представлен вид сбоку - точка 6. А на плоскость Х'О'Z' эта точка 6 изображается как вид в плане. Принято изображать столько проекций видов схем базирования, сколько необходимо для полного представления о наложенных связях на перемещение детали.
Эта схема базирования часто используется, что объясняется следующими ее достоинствами: лишая деталь всех шести степеней свободы, она обеспечивает свободный доступ инструментов для обработки заготовки с разных сторон; позволяет реализовать принцип единства баз и тем самым получать размеры и относительные повороты поверхностей детали координатным методом; позволяет достаточно просто фиксировать заготовки и приспособления-спутники на поточных и автоматических линиях.
Плоскость и два отверстия - всегда чистовые базы. Плоскость обрабатывают начисто на одной из первых операций, отверстия, как правило, развертывают по 7 квалитету. В качестве установочных элементов, как уже отмечалось выше, применяют опорные пластинки и два неподвижных или выдвижных пальца. Выдвижные пальцы применяют при установке крупных и тяжелых заготовок, когда они задвигаются в приспособление сбоку по направляющим, а также для фиксированного положения приспособлений-спутников на позициях автоматических линий.
Конструктивно различают установку на два цилиндрических пальца или на один цилиндрический и один срезанный пальцы. Граница применимости этих сочетаний определяется точностью диаметров и взаимного расположения базовых отверстий и требуемой точностью выдерживаемых на операции относительных расстояний и поворотов обрабатываемых поверхностей.
41

Рис. 2. Теоретическая схема базирования по плоскости и двум коротким отверстиям
42
При проектировании приспособлений с двумя пальцами перед конструктором всегда стоит задача определения диаметров пальцев, допусков на их изготовление и износ, допуска на межцентровое расстояние пальцев. Исходными условиями, которыми должен руководствоваться конструктор при решении этой задачи, являются:
1)обеспечение установки на два пальца любой заготовки с межцентровым расстоянием и диаметром отверстий в пределах заданного допуска;
2)обеспечение требуемой точности получаемых на операции размеров и взаимного положения поверхностей.
Диаметр одного из пальцев обычно задают равным номинальному размеру диаметра базового отверстия, а допуск назначают по f6, е9 в зависимости от точности отверстия. Диаметр второго пальца определяют, исходя из первого условия.
Существуют определенные условия, определяющие возможность установки деталей на два цилиндрических пальца. На рис. 3, а показано положение базовых отверстий 1 и 2 и пальцев 3 и 4 при номинальном размере межцентрового расстояния между ними L. Для вывода условия установки рассмотрим наихудший случай (рис. 3, б), когда межцентровое расстояние отверстий
выполнено на наибольшему предельному размеру L + δ2м.о ,
межцентровое расстояние пальцев приспособления – по наименьшему L − δ2м.п , а зазоры в сопряжениях отверстий с
пальцами выполнены минимальными - S1min и S2min. При таком положении ось каждого пальца сместится к середине
межцентрового расстояния на величину δ4м.п , а ось каждого
отверстия сместится от середины на величину δ4м.о от номинального положения осей О1 и О2. Следовательно, расстояния
43

О1/О1// и О2/О2// равны δ4м.о + δ4м.п . На рис. 3, б видно, что оси отверстий относительно осей пальцев могут сместиться на
величину |
S1min |
и |
S2 min |
. Поэтому |
можно |
записать |
|
2 |
2 |
||||||
|
|
|
|
|
|||
2(0,25δм.о +0,25δм.п) = 0,5S1min +0,5S2 min . |
Отсюда |
можно |
|||||
определить условие установки заготовки на два цилиндрических пальца
S1min + S2 min ≥δм.о +δм.п |
( 1 ) |
Рис. 3. Установка детали на два пальца
Если необходимо выбирать минимальный зазор между пальцем и вторым отверстием так же, как и для первого отверстия по f6 – e9 то, как видно из условия (1), допуски на межцентровые расстояния должны быть очень малы. Это делает обработку базовых отверстий дороже. Обычно допуски на межцентровые расстояния пальцев и отверстий значительно шире допусков на их диаметры. Поэтому чтобы выдержать условие установки детали на два цилиндрических пальца диаметр второго пальца приходится значительно уменьшить. Определим диаметр второго пальца исходя из условия, что расстояние S2min равно разности между минимальным диаметром отверстия dо2 и максимальным диаметром пальца dп2; т.е. S2min = do2 – dп2. Подставив это
выражение в уравнение (1), получим S1min + do2 – dп2 = δм.о + δм.п, отсюда
44
dп2 = (do2 + S1min −δм.о −δм.п)−δп2 , |
( 2 ) |
где δп2 – допуск на диаметр второго пальца, который выбирают так же, как и для первого.
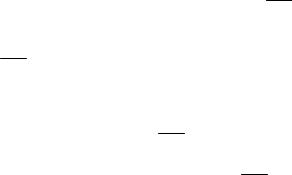
Следовательно, чтобы сохранить возможность установки на два цилиндрических пальца, необходимо увеличить минимальные зазоры в сопряжениях пальцев и отверстий, а это чаще всего приводит к недопустимому снижению точности установки. Значительно повысить эту точность, при сохранении возможности гарантированной установки любой детали из партии с межцентровым расстоянием базовых отверстий в пределах заданного допуска, удается, если второй палец будет срезанным, а не цилиндрическим. Конструктивные элементы пальцев (кроме исполнительного диаметра) должны выполняться в соответствии с ГОСТом (рис. 4).
Рис. 4. Пальцы установочные постоянные: а – цилиндрические; б – срезанные.
Схема установки заготовок на один цилиндрический и один срезанный палец показана на рис. 3, в. Как видно, срез пальца увеличивает зазор х в направлении общей оси двух базовых отверстий О1О2, что позволяет установить заготовки с более широким допуском. Поэтому при расчете диаметра срезанного
45

пальца следует выбирать стандартную величину цилиндрической ленточки b. Условие установки можно записать аналогично формуле (1), заменив S2min на х:
S1min + x ≥ δм.о + δм.п. |
( 3 ) |
Величину х определим, рассмотрев два секторных треугольника О2КМ и О2′КМ, которые имеют общую высоту h. Эту высоту можно определить из каждого треугольника:
|
|
2 |
|
|
/ |
|
2 |
|
KN 2 |
|
2 |
|
KM |
2 |
|
|||||
h |
|
= (O2 K ) |
|
− |
|
|
|
|
|
= (O2 K ) |
|
− |
|
; |
|
|||||
|
|
|
2 |
|
|
2 |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
d 2 |
|
|
c2 |
|
d 2 |
|
|
b |
2 |
|
|
|
|
|
|
|
|
||
|
|
o2 |
− |
|
= |
|
п2 |
− |
|
|
; |
|
|
|
|
|
|
|
||
|
|
|
4 |
|
4 |
4 |
|
|
|
|
|
|
|
|||||||
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
отсюда c = |
do22 dп22 +b2 , так как с = х + b, то |
|
|
|
||||||||||||||||
|
x = do22 −dп22 +b2 −b . |
|
|
|
|
|
|
|||||||||||||
Тогда условие (3) можно записать |
|
|
|
|
|
|
||||||||||||||
|
S1min + do22 −dп22 |
+b2 |
−b ≥δм.о +δм.п |
|
|
|
||||||||||||||
и диаметр срезанного пальца |
|
|
|
|
|
|
|
|||||||||||||
dп2 |
= |
do22 |
+b2 −(b +δм.о +δм.п − S1min )2 |
. |
( 4 ) |
|||||||||||||||
При установке на два пальца возможны два случая:
1)когда обеспечивается контакт базовых отверстий с пальцами по определенным образующим;
2)когда такого контакта нет.
На рис. 5 приведена схема установки в первом случае, когда сила Q обеспечивает контакт базовых отверстий с пальцами по образующим в точках К и М. При такой установке могут возникать погрешности размеров А, Б, В, Г, Д и взаимного смещения β. Погрешности указанных размеров вызваны
46

несовмещением технологической и измерительной баз. Технологическая база – это непосредственно реальный контур базовых отверстий, а измерительная принадлежит скрытой точке оси этих базовых отверстий.
Погрешности базирования А, Б, В
εδА = εδБ |
= |
δо1 |
+ |
δп1 |
; |
εδВ |
= |
δо2 |
+ |
δп2 |
. |
( 5 ) |
|
2 |
2 |
2 |
2 |
||||||||||
|
|
|
|
|
|
|
|
|
В направлении размеров Г и Д не действуют силы, которые обеспечивали бы постоянный контакт базовых отверстий и пальцев по определенным образующим, поэтому погрешности базирования размеров Г и Д
εδГ = δо1 + S1min + δп1 ; |
εδД = δо2 + S2min = δп2. ( 6 ) |
Рис. 5. Образование погрешностей размеров при установке на два пальца
В случае установки детали на срезанный палец изменение положения оси центрового отверстия относительно оси срезанного пальца в направлении межцентрового расстояния может
происходить в пределах х, поэтому εδL = do22 −dп22 +b2 −b .
Во втором случае, при отсутствии сил, обеспечивающих контакт базовых отверстий с пальцами по определенным
47
образующим, погрешности всех размеров будут больше, чем по первому варианту.
Контрольные вопросы для защиты работы
1.Дайте характеристику комплекту баз, состоящему из плоскости и перпендикулярными ей осями двух отверстий.
2.Какие элементы станочного приспособления реализуют эту схему базирования?
3.На какой параметр точности обрабатываемой детали оказывает относительная точность выполнения дополнительных баз и установочных элементов приспособления, реализующих эту схему базирования?
4.Объясните, почему один из двух установочных пальцев имеет ромбическую форму, и каким образом он ориентируется в станочном приспособлении?
5.Как определить величину погрешности базирования и как влияет относительное расположение обрабатываемой поверхности и дополнительных баз на ее величину?
6.Какой комплекс мероприятий можно рекомендовать при проектировании станочных приспособлений с целью снижения ошибок базирования?
7.Существуют ли производственные условия (и если да, то какие?) для снижения ошибок базирования на эксплуатируемых приспособлениях техпроцесса?
II. Экспериментальная часть
Описание конструкции экспериментальной установки
Измерение ошибок базирования выполняется на учебной лабораторной установке (рис. 6), где представлена конструкция и фото общего вида установки с исследуемой моделью детали. Конструкция установки реализует схему базирования, описанную ранее (см. рис. 1, б или рис. 2).
48

Корпус 1 имитирует установочную поверхность нижней плиты приспособления, а пластина 4 является моделью обрабатываемой детали. Для создания различных вариантов базирования в корпусе 1 и модели 4 выполнено по четыре отверстия, которые сверлились и развертывались совместно, чтобы обеспечить их попарную соосность. Втулки 5 с коническими отверстиями позволяют точно устанавливать комплекты сменных пальцев – цилиндрического 2 и ромбического 3 или двух цилиндрических. Индикаторы 6, 7 и 8 обеспечивают фиксацию ошибки базирования.
Рис. 6. Учебная лабораторная установка:
а – конструкция установки; б – фото общего вида с исследуемой моделью детали; 1 – корпус, 2 – палец
цилиндрический, 3 – палец ромбический, 4 – модель детали, 5 – втулка с коническим отверстием, 6, 7, 8 – индикаторы.
49