

lomakina-a
.pdfсоответствующей ей обобщённой координаты q j и определяется ра-
венством [Q j ]= [A]/[q j ] , где [A] – размерность работы.
Если обобщённая координата измеряется линейными величинами, то размерность обобщённой силы совпадает с размерностью силы; если же обобщённая координата представляет угол, то размерность обобщённой силы совпадает с размерностью момента, и т.д.
Всоответствии с классификацией сил, действующих на механическую систему, обобщённые силы разделяются на обобщённые внеш-
ние и внутренние силы или на обобщённые задаваемые (активные) силы и обобщённые реакции связей.
Вслучае стационарных связей обобщённые реакции идеальных связей равны нулю.
Действительно, для нахождения обобщённой реакции, соответст-
вующей координате q j , следует вычислить сумму работ реакций связей на перемещении системы, соответствующем приращению δq j этой ко-
ординаты, а затем определить обобщённую реакцию связи по формуле
|
n |
|
|
||||
|
∑ Riδsij cos( |
|
|
|
|
) |
|
|
Ri , δ |
|
ij |
||||
|
s |
||||||
QR = |
i =1 |
|
. |
||||
δq j |
|
||||||
j |
|
|
|||||
|
|
|
|||||
В случае стационарных связей описанное перемещение системы является одним из возможных перемещений этой системы, а потому сумма работ реакций идеальных связей на этом перемещении равна нулю:
n |
|
||||
∑Riδsij cos( |
|
|
|
|
)= 0 . |
Ri , δ |
|
ij |
|||
s |
|||||
i =1 |
|
||||
Отсюда следует, что |
|
||||
QR = 0 ( j = 1, 2, ..., s) . |
|||||
j |
|
||||
Таким образом, при определении обобщённых сил реакции идеальных связей выпадают.
Покажем, что обобщённую силу, соответствующую обобщённой координате q j , можно также вычислить как отношение мощности
всех сил, приложенных к механической системе при возможной обоб-
щённой скорости |
& |
, к величине этой обобщённой скорости. |
|
|||||
q j |
|
|||||||
Мощность указанной системы сил определится по формуле |
|
|||||||
|
|
n |
n |
|
||||
|
|
N j = ∑ Nij |
= ∑ |
|
|
|
|
(10) |
|
|
Fi ϑij , |
||||||
|
|
i=1 |
i=1 |
|
||||
9

¶ri |
& |
|
|
где Jij = ¶q j |
– скорость точки M i системы, соответствующая воз- |
||
q j |
можной обобщённой скорости |
& |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
q j . |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Подставив значение |
|
ij |
в (10), получим |
|
|
|
|
||||||||||||
J |
¶ri |
|
|||||||||||||||||
n |
n |
|
|
|
|
¶ri |
|
|
n |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
& |
& |
|
|
|
|
|
|
|
N j = ∑ Nij = ∑ Fi |
¶q j |
q j |
= q j ∑ Fi |
¶q j |
. |
||||||||||||||
i=1 |
i=1 |
|
|
i=1 |
|
||||||||||||||
На основании (8) имеем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
& |
|
|
|
|
|
|
|
|
N j = ∑ Nij = Q j q j . |
|
|
|
|
||||||||||||||
|
|
|
|
i =1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
Поэтому |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
N j |
|
∑ Nij |
|
|
|
|
|||||||||
Q j |
= |
= |
i =1 |
|
. |
|
|
|
|
|
(11) |
||||||||
& |
|
|
|
|
& |
|
|
|
|
|
|
||||||||
|
|
|
|
q j |
|
|
|
q j |
|
|
|
|
|
|
|
|
|||
Формула (11) позволяет определять обобщённую силу, соответствующую обобщённой координате q j , как отношение мощности систе-
мы сил, соответствующей возможной обобщённой скорости q& j , к чи-
словому значению этой обобщённой скорости при условии, что q& j ¹ 0 ,
а все остальные возможные обобщённые скорости равны нулю. Рассмотрим способы вычисления обобщённых сил.
1. Обобщённые силы можно вычислить по формуле (8), которую удобнее представить в следующем виде (использовано равенство, выражающее скалярное произведение двух векторов через их проекции):
|
n |
¶x |
|
¶y |
k |
|
¶z |
k |
|
|
|
|
k |
|
|
|
|
|
|
||
Q j |
= ∑ Fkx |
¶q j |
+ Fky |
¶q j |
+ Fkz |
|
|
. |
(12) |
|
|
k =1 |
|
|
¶q j |
|
|||||
Здесь Fkx , Fky , Fkz |
– проекции силы Fk |
на оси декартовой системы |
||||||||
координат.
2. Для вычисления обобщённой силы, например Q1 , зададим та-
кое виртуальное перемещение, при котором все вариации обобщённых координат, кроме dq1 , равны нулю:
dq1 ¹ 0 , dq2 = dq3 = ... = dqs = 0 .
Вычислим на этом перемещении виртуальную работу dA1 всех
активных сил, приложенных к системе. На основании формулы (9) будем иметь
dA1 = Q1dq1 .
10
Множитель при вариации δq1 |
равен первой обобщённой силе. |
||||||||||||||||||||||||
Аналогичным образом вычисляются остальные обобщённые силы. |
|||||||||||||||||||||||||
3. |
Третий способ применим только для консервативных сил. Ес- |
||||||||||||||||||||||||
ли силы консервативны, то будут справедливы равенства |
|||||||||||||||||||||||||
|
F = − |
∂П |
, F = − |
∂П |
, F = − |
|
∂П |
, |
|||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||
|
kx |
∂xk |
|
|
ky |
|
|
∂yk |
|
|
|
kz |
|
|
∂zk |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
где П – |
потенциальная энергия системы. |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Внося эти выражения для Fkx , Fky , Fkz |
в формулу (12), получим |
||||||||||||||||||||||||
|
n |
|
∂П |
|
∂x |
k |
|
|
∂П ∂y |
k |
|
∂П |
|
∂z |
k |
|
|
||||||||
|
Q j = −∑ |
|
|
|
|
|
+ |
|
|
|
|
|
|
|
+ |
|
|
|
|
|
, |
||||
|
∂x |
|
|
∂q |
|
|
∂y |
|
|
∂q |
|
∂z |
|
|
∂q |
|
|
||||||||
|
|
|
k |
|
j |
|
k |
j |
k |
|
|
|
|
||||||||||||
|
k =1 |
|
|
|
|
|
|
|
|
|
|
|
|
j |
|||||||||||
или, учитывая, что потенциальная энергия П зависит от обобщённых координат сложным образом через декартовы координаты xk , yk , zk :
Q = − |
∂П |
( j = 1, 2, ..., s). |
(13) |
j |
∂q j |
|
Таким образом, обобщённая сила консервативной системы равна частной производной потенциальной энергии по соответствующей обобщённой координате, взятой с обратным знаком.
Итак, при вычислении обобщённых сил учитываются только активные силы, приложенные к системе; реакции идеальных связей не учитываются, так как их работа равна нулю; если имеются силы трения, то они присоединяются к активным силам.
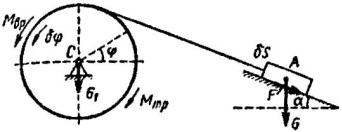
Пример.
Груз А весом G поднимается лебёдкой с помощью троса по шероховатой наклонной плоскости, которая составляет с горизонтом угол α . К валу лебёдки В радиусом r приложены вращающий момент M вр и
момент трения M тр (рис. 7).
Зная, что коэффициент трения скольжения груза по плоскости равен f, и пренебрегая весом троса, определить обобщённую силу, приняв за обобщённую координату q угол поворота ϕ вала лебёдки.
Рис. 7
11
Решение. Обобщённую силу Qϕ , соответствующую обобщённой координате ϕ, можно определить как по формуле (8), так и по формуле
(11). Для определения Qϕ |
по формуле (8) сообщаем обобщённой ко- |
|||||||||||
ординате ϕ |
приращение |
|
δϕ |
и составляем сумму работ моментов |
||||||||
M вр , M тр , |
|
|
|
|
|
|||||||
силы тяжести |
G |
и силы трения |
F |
на перемещениях, вы- |
||||||||
званных приращением угла поворота ϕ . |
||||||||||||
|
δAϕ = M врδϕ − M трδϕ − G sin αδs − fG cos αδs . |
|||||||||||
Так как δs = rδϕ , имеем |
|
|
|
|
|
|||||||
|
δAϕ = [M вр − M тр − Gr(sin α + f cos α)]δϕ . |
|||||||||||
Тогда |
|
|
δAϕ |
|
|
|
|
|
|
|
|
|
|
Q |
= |
= M |
|
|
− M |
|
− Gr(sin α + f cos α) . |
||||
|
|
|
|
|
||||||||
|
ϕ |
|
δϕ |
|
вр |
|
тр |
|
|
|
||
Применяя формулу (11), в которую входит мощность системы сил, соответствующая возможной обобщённой скорости системы ϕ& ,
получаем
|
n |
|
n |
|
|
|
|
||
|
∑ Nij |
|
∑ Niϕ |
& |
& |
& |
|
||
|
i=1 |
|
i=1 |
|
M |
|
|||
Q = |
= |
= |
врϕ − M |
трϕ − G(sin α + f cos α)rϕ |
= |
||||
|
|
|
|
|
|||||
ϕ |
q j |
|
ϕ |
|
|
ϕ |
|||
|
& |
& |
|
|
|
|
& |
|
|
= M вр − M тр − Gr(sin α + f cos α).
Результат получился тот же.
3. ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ. УСЛОВИЯ РАВНОВЕСИЯ КОНСЕРВАТИВНОЙ СИСТЕМЫ СИЛ
Принцип возможных перемещений, дающий общий метод решения задач статики, можно применить и к решению задач динамики. На основании принципа Германа– Эйлера– Даламбера для несвободной механической системы в любой момент времени геометрическая сумма равнодействующей задаваемых сил, равнодействующей реакций связей и силы инерции для каждой точки M i механической системы равна нулю.
Fi + Ri + Фi = 0 (i = 1, 2, ..., n).
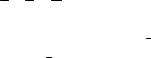
Если система получает возможное перемещение, при котором каждая точка имеет возможное перемещение δsi (рис. 8), то сумма работ этих сил на перемещении δsi должна быть равна нулю:
12
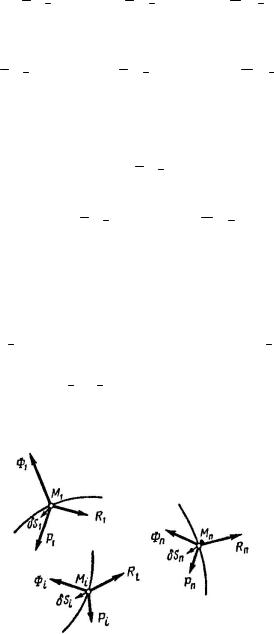
Fi δsi cos(Fi , δsi )+ Ri δsi cos(Ri , δsi )+ Фi δsi cos(Фi , δsi ) = 0 |
|
(i = 1, 2, ..., n). |
(14) |
Суммируем все n уравнений:
∑ Fi δsi cos(Fi , δsi )+ ∑ Ri δsi cos(Ri , δsi )+ ∑Фi δsi cos(Фi , δsi ) = 0 . (15)
Положим, что все связи в рассматриваемой механической системе двусторонние и идеальные (силы трения, если они имеются, отнесены к числу задаваемых сил). Тогда сумма работ реакций связей на возможных перемещениях системы равна нулю:
∑ Riδsi cos(Ri , δsi )= 0 .
При этом условии уравнение (15) имеет вид |
|
∑ Fi δsi cos(Fi , δsi )+ ∑Фi δsi cos(Фi , δsi ) = 0 . |
(16) |
Уравнение (16), называемое общим уравнением динамики, пока-
зывает, что в любой момент времени сумма работ всех задаваемых сил и сил инерции материальных точек несвободной механической системы с двусторонними идеальными связями на любом возможном её перемещении равна нулю.
Если в каждую точку M i системы из некоторого центра О про-
вести вектор ri , то возможное перемещение этой точки δsi будет со-
ответствующим приращением радиуса-вектора точки:
δsi = δri (i = 1, 2, ..., n).
Так как возможное перемещение точки не обязательно направлено в сторону её действительного движения, то возможное приращение
Рис. 8
13
радиуса-вектора δri не всегда равно действительному приращению радиуса-вектора точки dri .
Работу задаваемых сил |
Fi |
и сил инерции |
Фi на возможных пе- |
|||||||||||||||||||||||||||
ремещениях точек системы δ |
|
|
можно представить в виде скалярных |
|||||||||||||||||||||||||||
ri |
||||||||||||||||||||||||||||||
произведений δA = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Fdr |
|
. Тогда уравнение (16) примет вид |
|
|||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
∑ |
|
|
ri + ∑ |
|
i δ |
ri = 0 или ∑( |
|
|
|
i )δ |
ri = 0 . |
(17) |
||||||||||
Fi δ |
Ф |
Fi + |
Ф |
|||||||||||||||||||||||||||
Обозначим: X i ,Yi , Z i |
– |
проекции задаваемых сил |
|
Fi |
на непод- |
|||||||||||||||||||||||||
вижные оси декартовых |
координат; Фix , Фiy , Фiz – |
проекции сил |
||||||||||||||||||||||||||||
инерции |
|
i , а δxi , δyi , δzi |
– проекции векторов возможных переме- |
|||||||||||||||||||||||||||
Ф |
||||||||||||||||||||||||||||||
щений δ |
|
|
на те же оси. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
ri |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Пользуясь аналитическим |
выражением |
элементарной |
работы |
|||||||||||||||||||||||||||
δA = |
|
|
|
, уравнению (17) можно придать следующий вид |
|
|||||||||||||||||||||||||
Fdr |
|
|
||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
∑[(X i + Фix )δxi |
+ (Yi + Фiy )δyi + (Zi |
+ Фiz )δzi ]= 0 . |
(18) |
|||||||||||||||||||
Выразим проекции силы инерции точки на оси координат через |
||||||||||||||||||||||||||||||
проекции её ускорения: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
&& |
|
|
|
|
&& |
|
|
&& |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
Фix = −mi xi ; |
Фiy = −mi yi ; Фiz = −mi zi . |
|
|
|
|
||||||||||||||||
Подставив эти значения в уравнение (18), окончательно получим |
||||||||||||||||||||||||||||||
&& |
|
|
|
|
|
|
&& |
|
|
&& |
|
|
|
|
(19) |
|||||||||||||||
|
|
|
|
|
|
|
∑[(Xi − mi xi )δxi + (Yi |
− mi yi )δyi + (Zi − mi zi )δzi ]= 0 . |
||||||||||||||||||||||
Общее уравнение динамики (19) позволяет составить дифференциальные уравнения движения любой механической системы. Если механическая система состоит из отдельных твёрдых тел, то силы инерции точек каждого тела можно привести к силе, приложенной в некоторой точке тела, и паре сил. Сила равна главному вектору сил инерции точек этого тела, а момент пары равен главному моменту этих сил относительно центра приведения.
Чтобы воспользоваться принципом возможных перемещений, к каждому телу прикладывают действующие на него задаваемые силы, а также условно прикладывают силу и пару, составленные силами инерции точек тела. Затем системе сообщают возможное перемещение и для всей совокупности задаваемых сил и приведенных сил инерции составляют уравнение (16) или (19).
Если среди связей системы имеются односторонние, то для применения общего уравнения динамики необходимо, чтобы возможные перемещения системы не были освобождающими.
14

Рассмотрим условия равновесия консервативной системы сил и выразим общее уравнение динамики в обобщённых силах. Для этого приведём общее уравнение динамики (16) к виду
|
|
|
|
|
|
|
|
|
|
n |
|
|
n |
|
||||||
|
|
|
|
|
|
|
|
|
|
∑ |
|
|
ri + ∑ |
|
|
i δ |
ri = 0 . |
|||
|
|
|
|
|
|
|
|
Fi δ |
Ф |
|||||||||||
|
|
|
|
|
|
|
|
|
|
i=1 |
|
|
i=1 |
|
||||||
На основании (9) |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
n |
|
|
|
s |
|
|
n |
s |
||||||||
|
|
∑ |
|
|
|
ri = ∑Q j δq j ; ∑ |
|
i δ |
ri = |
∑Q Фj δq j , |
||||||||||
|
|
Fi δ |
Ф |
|||||||||||||||||
|
|
|
i=1 |
|
|
|
j=1 |
|
|
i=1 |
j=1 |
|||||||||
|
n |
|
|
∂ri |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где Q j |
= ∑ |
|
|
|
|
|
|
|
|
– обобщённая сила системы сил, действующих на |
||||||||||
Fi |
|
|
|
|
|
|
||||||||||||||
∂q |
|
|
|
|||||||||||||||||
|
i=1 |
|
|
j |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
механическую систему, соответствующая обобщённой координате q j ;
n |
|
|
|
|
|||
∂ri |
|
||||||
QФj = ∑ |
|
i |
– обобщённая сила инерции, соответствующая обоб- |
||||
Ф |
|||||||
|
|||||||
i=1 |
∂q |
j |
|||||
|
|
||||||
щённой координате q j .
Подставив эти значения в общее уравнение динамики (16), полу-
чаем
s |
s |
s |
(Q j + Q Фj |
)δq j = 0 . |
|
∑Q j δq j |
+ ∑QФj δq j |
= 0 или ∑ |
(20) |
||
j=1 |
j=1 |
j=1 |
|
|
|
Приращения обобщённых координат δq j произвольны и не зави-
сят друг от друга. Поэтому в полученном уравнении (20) все коэффициенты при этих приращениях должны быть равны нулю.
Приравняем нулю эти коэффициенты
Q |
j |
+ Q |
Ф |
= 0 ( j = 1, 2, ..., s). |
(21) |
|
|
j |
|
|
Уравнения (21) эквивалентны общему уравнению динамики (20). Если силы, действующие на механическую систему, уравновешиваются, т.е. механическая система находится в состоянии покоя, или все её точки движутся прямолинейно и равномерно, то силы инерции её точек равны нулю. Следовательно, и обобщённые силы инерции
системы равны нулю:
Q |
Ф = 0 ( j = 1, 2, ..., s). |
|
|
j |
|
Тогда уравнения (21) принимают вид |
|
|
Q j |
= 0 ( j = 1, 2, ..., s). |
(22) |
15
Равенства (22) выражают условия равновесия сил в обобщённых силах. Преобразуем условия равновесия (22) для консервативных сил, т.е. сил, имеющих потенциал.
Для любой системы сил условия равновесия имеют вид
Q j = 0 ( j = 1, 2, ..., s).
В случае консервативных сил обобщённые силы определяются формулами
Q |
|
= − |
∂П |
( j = 1, 2, ..., s). |
|
j |
∂q j |
||||
|
|
|
|||
|
|
|
|
Следовательно, условия равновесия консервативной системы сил имеют вид
∂П = 0 ( j = 1, 2, ..., s).
∂q j
Пример.
Рис. 9
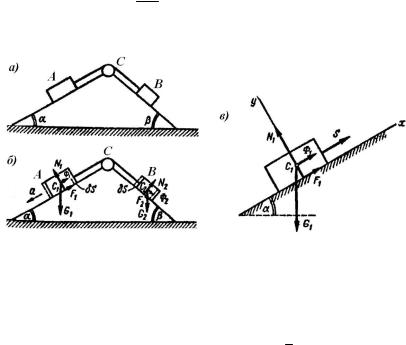
На треугольной призме, боковые грани которой образуют с горизонтом углы α и β , помещены два груза A и B весом G1,G2 , связан-
ные между собой невесомой и нерастяжимой нитью, переброшенной через блок C (рис. 9, а). Зная, что коэффициент трения скольжения равен f, определить ускорение движения грузов a и натяжение нити; массой блока пренебречь.
Решение.
Заданная механическая система состоит из двух грузов, движущихся поступательно. Нить и блок, массы которых не учитываются, являются связями. Система имеет одну степень свободы.
Предположим, что груз A движется вниз, а груз B – вверх.
16
Покажем задаваемые силы – силы тяжести G1,G2 , нормальные
реакции боковых граней призмы N1, N2 , силы трения F1, F2 (рис. 9, б).
Модули сил трения соответственно равны
F1 = fN1 и F2 = fN2 ,
где N1 = G1 cos α , N 2 = G2 cosβ .
Поэтому
F1 = fG1 cos α , F2 = fG2 cosβ .
Силы трения направлены в стороны, противоположные направлениям движения грузов.
Так как грузы движутся поступательно, то равнодействующие сил инерции приложены в центрах масс тел, а их модули
Ф |
1 |
= m a = |
G1 |
a , Ф |
2 |
= m |
a = |
G2 |
a . |
|
|
||||||||
|
1 |
g |
|
2 |
|
g |
|
||
|
|
|
|
|
|
|
|
Приложим к грузам условно силы инерции Ф1 , Ф2 , направив их противоположно ускорению a . Сообщим мысленно системе возможное поступательное перемещение δs , например в сторону движения грузов. Составим общее уравнение динамики, применяя (16), в которое не войдут нормальные реакции боковых граней призмы N1, N 2 , направления которых перпендикулярны возможным пере-
мещениям грузов:
G1 sin αδs − G1 f cos αδs − Ф1δs − G2 sin βδs − G2 cos βδs − Ф2 δs = 0 .
Подставляем в это уравнение значения сил инерции и делим его на δs :
G sin α − G f cos α − |
G1 |
a − G sin β − G cosβ − |
G2 |
a = 0 . |
|||||||||
|
|
|
|||||||||||
1 |
1 |
|
g |
1 |
2 |
2 |
|
g |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||
Из этого уравнения определяем ускорение грузов |
|
|
|
||||||||||
|
a = g |
G1(sin α − f cos α)− G2 |
(sin β + f cosβ) |
. |
|||||||||
|
|
|
|
G1 + G2 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
Если G1(sin α − f cos α)− G(sin β + f cosβ) > 0 , то грузы движутся в |
|||||||||||||
указанном выше направлении. |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
||||||||||
Для определения |
натяжения |
нити |
|
S |
на основании принципа |
||||||||
Германа– Эйлера– Даламбера составим для сил, приложенных к телу, и его силы инерции уравнение проекций на ось x (рис. 9, в):
S − G sin α + F + Ф |
1 |
= 0 или S = G (sin α − f cos α)− |
G1 |
a . |
|
|
|||||
1 |
1 |
1 |
g |
||
|
|
|
|
||
17

Подставив значение ускорения после соответствующих преобразований, получим
S = G1G2 [sin α + sin β + f (cosβ − cosα)].
G1 + G2
4. УРАВНЕНИЯ ЛАГРАНЖА. КИНЕТИЧЕСКИЙ ПОТЕНЦИАЛ
Общее уравнение динамики (16) даёт возможность составлять дифференциальные уравнения движения, не содержащие реакции идеальных связей. Для сравнительно простых систем непосредственное применение этого уравнения вполне оправдано, однако в более сложных случаях использование общего уравнения динамики приводит, как правило, к относительно сложным преобразованиям. Поэтому значительно удобнее пользоваться не общим уравнением динамики, а вытекающими из него уравнениями Лагранжа второго рода, в которых основные трудности преобразования преодолены в общем виде.
Предположим, что механическая система из n материальных точек имеет s степеней свободы. В случае голономных нестационарных связей радиус-вектор ri любой точки M i этой системы является
функцией обобщённых координат q1, q2 , ..., qs и времени t:
ri = |
ri (q1 , q2 , ..., qs , t ) . |
(23) |
||||
Обобщённые координаты системы q1 , q2 , ..., qs |
являются функ- |
|||||
циями времени. Поэтому радиус-вектор |
|
является сложной функцией |
||||
ri |
||||||
времени и вектор скорости точки |
|
i определяется по правилу диффе- |
||||
ϑ |
||||||
ренцирования сложной функции: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
∂ |
|
|
|
|
|
|
∂ |
|
|
|
|
|
|
|
|
|
|
|
∂ |
|
|
|
|
∂ |
|
|
|
|
|
|
|||
|
|
|
dri |
|
|
|
ri |
& |
|
ri |
& |
|
|
|
|
ri |
& |
|
ri |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
ϑi = |
dt |
= |
∂q1 |
q1 + |
|
∂q2 |
q2 |
+ ... + |
∂qs |
qs |
+ |
∂t |
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
или |
|
|
|
|
|
|
|
|
|
|
|
∂ri |
|
|
|
|
|
∂ri |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ϑi = ∑ |
|
|
|
|
|
|
|
|
& |
|
+ |
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
(24) |
||||||||
|
|
|
|
|
|
|
∂q |
|
|
|
q j |
∂t |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
j =1 |
j |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
В случае стационарных связей |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
∂ri |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= ∑ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
ϑi |
|
|
|
|
|
|
|
|
& |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(25) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
∂q |
|
|
q j . |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
j =1 |
j |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Производные от обобщённых координат по времени |
& |
называ- |
||||||||||||||||||||||||||||||||||||||||
q j |
||||||||||||||||||||||||||||||||||||||||||
ются обобщёнными скоростями. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Из выражения (24) следует, что частная производная от |
|
i |
по ка- |
|||||||||||||||||||||||||||||||||||||||
ϑ |
||||||||||||||||||||||||||||||||||||||||||
кой-либо обобщённой скорости |
|
& |
|
|
|
|
|
равна коэффициенту при |
& |
|
в пра- |
|||||||||||||||||||||||||||||||
|
q j |
|
q j |
|||||||||||||||||||||||||||||||||||||||
18