

SEK_UP_i_MU_1_1
.pdf
|
точка пуска 0, |
M M П kП M H 785 Н м kП - кратность пусково- |
|
го момента. |
|
|
Дополнительные точки определяются по формуле Клосса: |
|
|
M i |
|
|
|
|
2M K |
|
; |
||||||
|
|
|
Si |
|
|
SK |
|
|||||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
SK |
|
|
Si |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||||
промежуточные точки при скольжении, равном S 0,3и S 0,5 |
||||||||||||||
M S 0.3 |
|
2 883 |
|
869Н м; |
||||||||||
|
|
|
|
|
|
|
|
|
||||||
0.3 |
|
0.36 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
0.36 |
0.3 |
|
|
|
|
|
|||||
M S 0.5 |
|
|
2 883 |
|
837Н м; |
|||||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
0.5 |
|
0.36 |
|
||||||||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
0.36 |
0.5 |
|
|
|
|
|
|||||
S 0.3 1 1 SK 157 |
(1 0,3) 110 рад / c; |
|||||||||||||
s 0.5 1 1 SK 157 (1 0,5) 79 рад / c;
характерные точки режима для быстроходной обмотки:
точка холостого хода M1 0, 1 157;
точка номинального режима M H 185, H 151; точка критического момента M K 883, K 100; точка пускового момента M П 785, П 0; промежуточная точка1 M П 869, П 110; промежуточная точка2 M П 837 , П 79.
б) для тихоходной обмотки:
точка идеального холостого хода для тихоходной обмотки: M1 0;
|
|
|
|
n |
|
|
60 f |
|
2 f |
|
2 3,14 50 |
78,5 рад/ с |
|
1 |
|
|
|
|
|
, |
|||||||
|
30 |
30 |
|
P |
|
P |
|
4 |
|
||||
|
|
|
|
|
|
|
|||||||
точка номинального режима |
M M H |
415,5Н м, H 72,2 рад/ с ; |
|||||||||||
точка, соответствующая критическому моменту
M K kM M H 1226 Н м ,
21

где kM - кратность максимального момента, |
K 1 1 SK , причѐм критиче- |
||||||||||||||||||||||||
ское скольжение SK |
|
определяется по выражению: |
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
S |
|
|
S |
|
|
|
|
|
k |
2 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
1 ; |
|
||||||||||
|
|
|
|
|
|
K |
|
H |
|
M |
|
|
|
|
M |
|
|
|
|
||||||
|
|
|
S |
|
1 |
H |
|
|
78,5 72,2 |
0,08; |
|||||||||||||||
|
|
|
H |
1 |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
78,5 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1226 |
|
|
|
|
1226 |
2 |
|
|
|
|
||||||||
|
|
|
0,08 |
|
|
|
|
|
1 |
|
0,456; |
||||||||||||||
|
S |
K |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
415,5 |
|
|
|
415,5 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
1 1 SK 78,5 (1 0,456 ) 42,7 рад / c; |
|
|
|
|
|
|||||||||||||||||||
|
точка пуска 0, |
M M H kП M H 1128 Н м , |
|||||||||||||||||||||||
где kП - кратность пускового момента.
Дополнительные точки определяются по формуле Клосса:
|
|
|
M i |
|
|
|
2M K |
|
|
|
; |
|||||
|
|
|
|
Si |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
SK |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SK |
Si |
||||||||
промежуточные точки при скольжении, равном S 0,3 и S 0,5 |
||||||||||||||||
M S 0.3 |
|
|
2 1226 |
|
|
|
1126Н м; |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
0.3 |
|
|
|
0.456 |
|
||||||||||
|
|
|
0.456 |
|
0.3 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
M S 0.5 |
|
2 1226 |
|
|
|
1179Н м; |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
0.5 |
|
|
|
0.456 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
0.456 |
0.5 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
S 0.3 1 1 SK 78,5 (1 0,3) 55 рад / c;
s 0.5 1 1 SK 78,5 (1 0,5) 39 рад / c;
характерные точки режима для тихоходной обмотки:
точка холостого хода M1 0, 1 78,5;
точка номинального режима M H 415,5 H 72,2; точка критического момента M K 1226 , K 42,7; точка пускового момента M П 1128 , П 0; промежуточная точка1 M П 1126 , П 55;
22
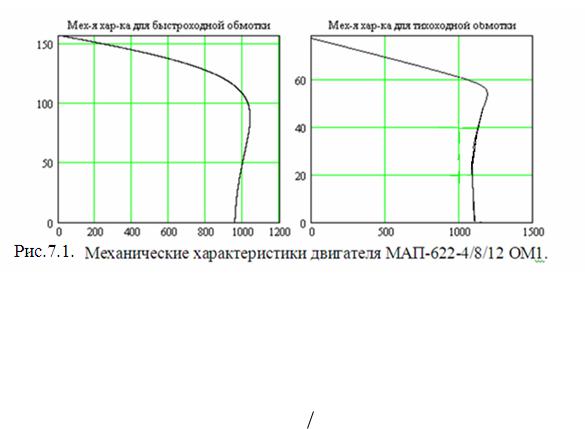
промежуточная точка2 M П 1179 , П 39.
На рисунке приведены механические характеристики АД Рис.7.1.
Построение нагрузочной диаграммы.
1) При подъѐме номинального груза приведѐнный к валу двигателя мо-
мент инерции электропривода определяется:
|
|
|
|
|
|
|
VП |
2 |
|
J k J |
|
J |
|
i |
2 |
|
|
, |
|
|
|
|
|
||||||
|
|
|
m |
|
|
||||
ПР |
ДВ |
|
МЕХ |
|
|
|
|
|
|
|
|
|
|
ДВ |
|
||||
|
|
|
|
|
|
|
|||
где k 1,1 1,3; JМЕХ  i2 - опускаем из-за еѐ малости. Тогда для двигателя без тормоза
i2 - опускаем из-за еѐ малости. Тогда для двигателя без тормоза
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
50 |
|
2 |
|
|
||||
|
|
J |
ПР |
1,2 1,375 2500 |
|
|
|
1,726кг м2 . |
|||||||||||||||
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
60 151,2 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
2) Время разгона двигателя на подъѐме груза |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
СТ |
|
151,2 |
|
|
|
|||||||
|
|
|
tР1 J ПР |
|
|
|
|
|
|
|
1,726 |
|
|
|
0,42с. |
||||||||
|
|
|
М |
П |
M |
|
|
785 168 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
СТ 1 |
|
|
|
|
|
|
||||||
|
3) Расчѐтный тормозной момент |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
РН 2 |
3 |
|
|
24,05 0,852 |
3 |
|
|
|
||||||||
|
|
МТР |
|
|
|
|
|
10 |
|
|
|
|
|
|
10 115Н |
м. |
|||||||
|
|
Н |
|
|
151,2 |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
4) Время торможения при подъѐме груза и отключения двигателя |
||||||||||||||||||||||
tT 1 |
J |
ПР |
|
|
|
СТ |
|
|
|
|
1,2 1,625 |
|
151,2 |
|
0,74с, |
||||||||
М1СТ 2М Т |
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
168 2 115 |
|||||||||||||
23
|
где MT k MТР , k - коэффициент запаса тормоза k 2,0 . |
|
|
||||||||
|
5) Время пуска двигателя на спуск груза |
|
|
|
|
||||||
tР 2 |
J ПР |
|
СТ |
|
|
1,2 1,375 |
|
72,2 |
0,10с. |
||
М |
П М |
|
|
1128 117 ,9 |
|||||||
|
|
|
СТ 2 |
|
|
||||||
|
6) Время торможения при спуске груза |
|
|
|
|
||||||
tT 2 J ПР |
|
|
СТ |
|
|
1,2 1,625 |
72,2 |
|
1,26с. |
||
М T |
2М |
|
|
|
|
|
|||||
|
|
СТ 2 |
|
2 115 117 ,9 |
|||||||
7) Пути, пройденные при разгоне и торможении двигателя во время подъ-
ѐма:
H |
|
|
VП tР1 |
|
50 0,42 |
0,18м; |
P1 |
|
|
||||
|
2 |
|
60 2 |
|||
|
|
|
||||
H |
|
|
|
VП tТ1 |
|
|
50 0,74 |
|
0,31м. |
|||||||
Т1 |
|
|
|
|||||||||||||
|
|
|
2 |
|
|
|
|
|
60 2 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
8) Пути, пройденные при разгоне и торможении двигателя во время спус- |
||||||||||||||||
ка: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
H |
|
|
|
|
VОП tР2 |
|
|
25 0,10 |
0,02м; |
|||||||
P2 |
|
|
|
60 2 |
||||||||||||
|
|
2 |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
H |
|
|
|
|
VОП tТ 2 |
|
|
|
25 1,26 |
0,26м. |
||||||
Т 2 |
|
|
|
|
60 2 |
|||||||||||
|
|
|
2 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
9) Установившаяся скорость подъѐма груза с учѐтом выбранного двигате-
ля и время подъѐма:
VП 30 D 1  i 30 0,42 151,2
i 30 0,42 151,2 36 52,9 м
36 52,9 м мин ;
мин ;
t |
|
|
Н Н Р1 |
НТ 1 |
25 0,18 0,31 60 |
27,8с. |
П |
VП |
|
||||
|
|
|
52,9 |
|
||
|
|
|
|
|
10) Установившаяся скорость опускания груза с учѐтом выбранного дви-
гателя и время спуска:
VOП 30 D 2  i 30 0,42 72,2
i 30 0,42 72,2 36 25,3 м
36 25,3 м мин ;
мин ;
24
t |
|
Н НР 2 НТ 2 |
25 0,02 0,26 60 |
58,6с. |
|
||||
OП |
|
VOП |
25,3 |
|
|
|
|
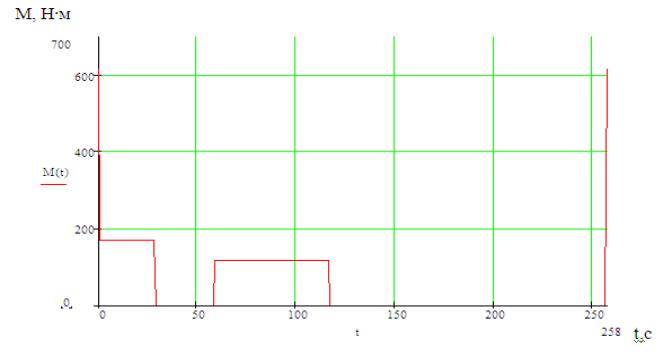
11) На основе расчѐта строим нагрузочную, скоростную и токовую диа-
граммы (рис.7.2).
Рис.7.2а. Нагрузочная диаграмма.
ω,рад/c
25

200
150
( t) 100
50
0 |
50 |
100 |
150 |
200 |
250 |
t
t,c
Рис 7.2б. Скоростная диаграмма.
I,А
600600
500
400
I(t) 300
200
100
0
0 |
50 |
100 |
150 |
200 |
250 |
0 |
|
|
t |
|
258 t,c |
|
|
Рис.7.2в. Токовая диаграмма. |
|
|
|
Время цикла
tЦ tР1 tП tТ1 tР2 tОП tТ 2 tО1 tО2
0,42 27,8 0,74 0,1 58,6 1,26 30 140 258,9c.
Мощность электродвигателя соответствует пуску, торможению и устано-
вившемуся режиму. Однако на этих этапах необходимо убедиться в отсутствии
26

перегрева электродвигателя путѐм оценки его эквивалентного (среднеквадра-
тичного) тока в цикле.
Эквивалентный (по нагреву) ток нагрузки электродвигателя определяется с по-
мощью:
|
|
|
|
1 |
n |
|
|
|
|
|
I Э |
I 2j t j , |
|
||
|
|
|
|
tЦ |
|
||
|
|
|
|
|
j 1 |
|
|
n |
|
|
|
|
|
|
|
где tЦ t j - интервала цикла. |
|
|
|
|
|||
j 1 |
|
|
|
|
|
|
|
Можно полагать, что на каждом этапе цикла ток электродвигателя посто- |
|||||||
янный. |
|
|
|
|
|
|
|
Во время разгона tP1 двигатель работает в режиме пуска I I П , следо- |
|||||||
вательно |
|
|
|
|
|
|
|
I 2 |
t |
P1 |
560 2 |
0,42 131712 |
A2 c. |
||
П |
|
|
|
|
|
|
|
Во время подъѐма груза с установившейся скоростью на быстроходной обмотке tП электродвигатель работает в режиме близком к номинальному
I НОМ2 tП 582 27,8 93519 A2 c.
При опускании груза электродвигатель работает в тормозном режиме. Во время разгона tP 2 двигатель работает в режиме пуска I I П , на тихоходной обмотке
I П2 tP 2 360 2 0,1 12960 A2 c.
Во время спуска груза с установившейся скоростью на тихоходной обмотке электродвигатель работает в режиме близком к номинальному
I НОМ2 tОП 84 2 58,6 413482 A2 c.
Тогда эквивалентный ток двигателя
|
|
|
|
1 |
|
0,5 |
I |
Э |
|
|
|
131712 93519 12960 413482 |
50,2A. |
|
||||||
|
|
258,9 |
|
|
||
|
|
|
|
|
|
Фактическая продолжительность включения двигателя
27

ПВ |
tР1 tП tТ 1 tР 2 tОП tТ 2 |
|
0,42 27,8 0,74 0,1 58,6 1,26 |
0,34 |
|
tЦ |
258,9 |
||||
|
|
|
или ПВ=34%.
Допустимое значение эквивалентного тока двигателя Iэкв.доп. определя-
ется соотношением
I экв2 .доп. ПВ I ном2 ПВном ,
откуда
I |
|
I |
|
ПВном |
58 |
50 |
70,3А. |
|
экв.доп. |
ном |
ПВ |
34 |
|||||
|
|
|
|
|||||
|
|
|
|
|
|
Следовательно, эквивалентный ток рабочего режима (50,2А) меньше до-
пустимого (70,3А) при фактической продолжительности включения ПВ=34%,
что доказывает возможность использования (по температурным условиям) вы-
бранного двигателя.
Выбор кабеля от распределительного щита
до электродвигателя
При выборе питающего кабеля исходят из расчѐта величины эквивалент-
ного тока, вида прокладки, температуры окружающей среды и т.д.
Величина расчѐтного тока кабеля I Р определяется по формуле
I Р |
|
IЭ |
|
|
50,2 |
50,2 A, |
||
k1 |
k |
2 |
0,9 1,41 |
|||||
|
|
|
|
|||||
где I Э - эквивалентный ток, определѐнный в п.7; k1 - коэффициент, учитываю-
щий уменьшение допустимой нагрузки кабеля находящегося в пучке; для одно-
рядных пучков - k1 0,9 , k2 - коэффициент, учитывающий число часов работы в сутки, к2=1,41, определяемый как
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
24 |
1,41, |
||
k |
2 |
24 t |
3 |
||||||
12 |
|||||||||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||
где t3 - суммарное время работы кабеля под нагрузкой за сутки, принято 12 ча-
сов работы в сутки грузоподъемного механизма.
Если k1 k2 1 , то принимают IР IЭ и выбор кабеля производят по таблицам.
28
Ниже приведена таблица нормальной загрузки некоторых судовых кабе-
лей.
|
|
|
|
|
Таблица 2 |
|
Сечение |
|
Допустимый ток, А |
|
|
||
жилы, мм2 |
1-жильный |
|
2-жильный |
|
3-жильный |
|
1 |
11 |
|
11 |
|
11 |
|
1,5 |
16 |
|
16 |
|
16 |
|
2,5 |
21 |
|
21 |
|
21 |
|
4 |
27 |
|
27 |
|
27 |
|
10 |
47 |
|
47 |
|
47 |
|
25 |
100 |
|
98 |
|
79 |
|
50 |
166 |
|
137 |
|
120 |
|
150 |
330 |
|
255 |
|
235 |
|
Выбираем 3-х жильный кабель сечением жилы 25 мм2 на ток 79 А.
В трѐхфазной системе для вычисления потери напряжения U Ф опреде-
ляют как
UФ RX cos X K sin I P |
|
0,865 60 0,86 |
|
0,106 60 0,51 |
|
|
|
|
|
|
|
|
|
50,2 |
2,4В, |
||
1000 |
1000 |
|||||||
|
|
|
|
|
|
где cos - коэффициент мощности выбранного двигателя.
Ниже приведены величины активных и реактивных сопротивлений одной жилы кабеля при температуре 65оС и частоте сети 50 Гц, для 1000 метров кабе-
ля.
Таблица 3
|
Сечение жи- |
|
|
|
|
|
|
|
|
|
|
|
|
|
лы, мм2 |
1 |
1,5 |
2,5 |
4 |
|
|
10 |
25 |
50 |
150 |
|
|
|
Активное со- |
|
|
|
|
|
|
|
|
|
|
|
|
|
противление |
21,6 |
14,4 |
8,65 |
5,4 |
|
2,16 |
0,865 |
0,432 |
0,144 |
|
||
|
Индуктивное |
|
|
|
|
|
|
|
|
|
|
|
|
|
сопротивление |
0,147 |
0,139 |
0,134 |
0,126 |
1,115 |
0,106 |
0,093 |
0,092 |
|
|||
|
Обычно потеря напряжения выражается в процентах от номинального |
||||||||||||
напряжения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U % |
U 100 % |
2,4 |
|
100 % 1,1%. |
|
|
|
|||||
|
|
|
|
|
|
|
|||||||
|
|
|
UФ |
|
220 |
|
|
|
|
|
|
|
|
Допустимые потери для сетей освещения – 5%, сетевых потребителей –
7%, норма не превышена.
29
Выбор коммутационной аппаратуры
Автоматический выключатель (автомат) предназначен для автоматиче-
ского размыкания электрических цепей при аварийной ситуации, а также для нечастых оперативных включений и отключений электрических цепей при нормальных режимах работы.
Автоматы снабжены расцепителями, контролирующими величину соот-
ветствующего параметра (в данном случае - тока).
Для включения и отключения электропривода выбираем автоматический вы-
ключатель А3114Р с комбинированным максимальным расцепителем на номи-
нальный ток 100А.
Управление режимами электропривода
Регулирование скорости в электроприводах на переменном токе осущест-
вляется за счѐт использования многоскоростных асинхронных электродвигателей и контроллеров управления (см. рис.7.3).
Статор асинхронного двигателя имеет две группы обмотки С2, и С3 ком-
бинации которых обеспечивают изменение механической характеристики элек-
тродвигателя с синхронными скоростями вращения. Обмотки подключаются через общий автоматический выключатель АВ и контакты силового кулачково-
го контроллера 1-ХП согласно таблице 4.
Вэтой же цепи включены реле тепловой защиты от перегрузки РТ1, РТ2
иРГ. При превышении тока величины установки реле оно срабатывает и раз-
рывает цепь контакторов грузовой защиты КГ1 и КГ2.
Цепи управления питаются через трансформатор Тр и выпрямитель Вп. В
аварийных ситуациях, не допускающих остановки электродвигателя, несмотря на его перегрузку, тепловая защита шунтируется кнопкой К. При отключении автомата АВ, ротор двигателя заторможен дисковым тормозом Т, который рас-
тормаживается электромагнитом ТМ при включении АВ.
Работа электропривода в направлении выбирать (подъѐм груза) и травить
(опускание груза) определяется только направлением вращения магнитного по-
ля. Реверс осуществляется контактами IV и VI. При положении рукоятки в сек-
30