

Метода ЦОС
.pdfu1(n)
-4 -3 -2 -1 0 1 2 3 4
n
Рисунок 3.11– Единичный скачок
По формуле (3.14) получаем
Следовательно, сумматор не является устойчивой системой.
Пример 3.9. На вход линейной стационарной системы поступает экспоненциальная последовательность вида
(3.16)
Замечание. Если – вещественное число, то последовательность называется вещественная экспоненциальная.
Исследуем систему на устойчивость. Используя последовательность (3.15) (единичный скачок), экспоненциальную последовательность запишем в форме
Отклик на единичный скачок
Сумма коэффициентов импульсной характеристики равна
(3.17)
Если , то формула (3.17) представляет собой сумму бесконечно убывающей геометрической прогрессии, которая сходится так как Сумма такой прогрессии выражается формулой
где – первый член последовательности, |
– знаменатель геометрической |
||
прогрессии. В примере |
(для |
, |
. Тогда |
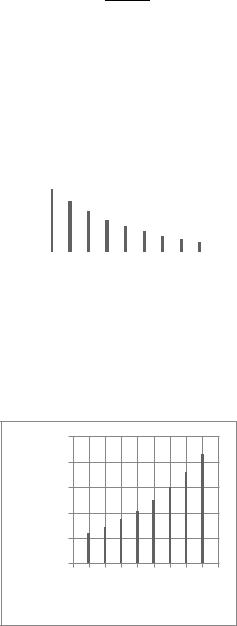
Следовательно, система, у которой устойчива и относится к классу БИХ фильтров. На рисунке 3.12 показана импульсная характеристика системы, удовлетворяющая выражению (3.17) для
|
|
|
h(n) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
Рисунок 3.12 – |
|
Импульсная характеристика устойчивой системы |
||||||||||||||||||||
Если |
, |
|
, то система будет неустойчивой. На рисунке 3.13 |
|||||||||||||||||||
изображена импульсная характеристика такой системы, |
. |
|||||||||||||||||||||
h(n)
5
4
3
2
1
0
0 1 2 3 4 5 6 7
n
Рисунок 3.13 – Импульсная характеристика неустойчивой системы
3.7. Линейные разностные уравнения с постоянными параметрами
Если известны параметры линейной стационарной системы, взаимосвязь между входной последовательностью и откликом на выходе описывают линейным разностным уравнением. Разностное уравнение определяет способ построения дискретной системы. По разностному уравнению можно определить характеристики системы, например, частоты соответствующие нулевому коэффициенту передачи и др.
Теория линейных разностных уравнений сходна с теорией линейных дифференциальных уравнений, описывающих соотношение вход-выход аналоговой линейной системы. Переход от дифференциальных уравнений к разностным обусловлен различием функций, описывающих сигналы
аналоговых систем. Поэтому вычисление производных заменяется вычислением разностей.
Линейное разностное уравнение имеет вид
(3.18)
где: – вещественные коэффициенты (веса) уравнения, определяющие свойства дискетной системы;
иконстанты;
изначения задержек для воздействия и отклика;
– |
и |
воздействие и отклик, задержанные на |
и |
периодов дискретизации соответственно. |
|
||
Уравнение (3.18) характеризуется порядком, равным max{ |
}. |
||
Как известно, дифференциальное уравнение решается с помощью методов численного интегрирования. Однако метод численного интегрирования является приближенным. Разностное уравнение (3.18) представляет собой алгоритм вычисления отклика методом простой
подстановки |
принципиально не вносящим погрешность. Имея |
|||
набор начальных условий (например, |
и |
для начальных значений |
||
аргумента и |
, по формуле (3.18) можно вычислить |
, для |
||
Пример 3.10. Решить разностное уравнение первого порядка |
||||
Здесь постоянные коэффициенты |
|
; |
начальное условие |
|
запишется как |
и |
|
|
|
Решение. |
|
|
|
|
Пример 3.11. Покажем, что отклик сумматора описывается разностным уравнением.
По определению отклик сумматора запишем в виде
. |
(3.19) |
C учетом (3.19) получаем выражение
. (3.20)
Например, если |
, для |
имеем |
Подставив соотношение (3.19) в (3.20) получаем
(3.21)
Таким образом, вход и выход сумматора связаны линейным разностным уравнением первого порядка
Так как сумматор описывается выражением (3.21.), то
и
(3.22)
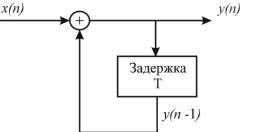
На рисунке 3.14 показана структурная схема, реализующая сумматор на основе уравнения (3.21).
Рисунок 3.14 – Структурная схема сумматора
Элемент «задержка» осуществляет временную задержку отсчетов на один интервал дискретизации. При каждом значении складывается значение отсчета входной последовательности с предыдущим значением отсчета выхода сумматора.
Пусть |
Тогда |
Если использовать другую форму уравнения (3.22), т.е.
,
структурная схема сумматора приобретет вид, рисунок 3.15.
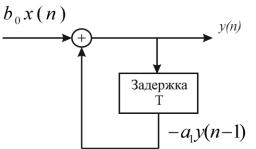
Рисунок 3.15 – Структурная схема дискретной системы
Замечание. Уравнения вида (3.18) или (3.21) и схемы, показанные на рисунках 3.14, 3.15 называют рекуррентным (рекурсивным) представлением дискретной системы, поскольку каждый отсчет реакции вычисляется с помощью ранее найденных значений отсчетов.
Упражнение 3.5. Решить разностное уравнение первого порядка
с начальным условием |
и |
Вычислить значения |
6-и отсчетов отклика |
|
|
3.7.1. Рекурсивные линейные дискретные системы
Определение 3.3. Линейная дискретная система называется рекурсивной, если хотя бы один из коэффициентов уравнения (3.18) не равен нулю.
Из уравнения (3.18) следует, что n -е значение отклика рекурсивной ЛДС в каждый момент времени определяется:
–текущим значением отсчета входа;
–предыдущими значениями отсчета входа;
–предыдущими значениями отсчета выхода.
Например, рекурсивная система первого порядка описывается разностным уравнением с ненулевыми коэффициентами вида
(3.23)
Поскольку стационарная (инвариантная к сдвигу) система характеризуется импульсной характеристикой, вычислим импульсную характеристику рекурсивной линейной дискретной системы, удовлетворяющей разностному уравнению первого порядка следующего вида
(3.24)
Согласно определению, импульсная характеристика – это отклик |
|
на единичный импульс, поэтому на входе действует |
и |
соответствует |
С учетом этого, получаем |
Вычисляем значения отсчетов |
методом прямой подстановки. |
Вычисление можно продолжать бесконечно по итерационной формуле
при
Выводы.
1. Импульсная характеристика рекурсивной линейной дискретной системы имеет бесконечную длительность.
2. Значения отсчетов определяются коэффициентами разностного уравнения
3. Рекурсивные ЛДС относятся к классу БИХ систем (фильтров). Заметим, что порядок фильтра указывает какое число предыдущих выходов надо рассматривать.
Вычислим отклик рекурсивной линейной системы, описываемой уравнением (3.24) для произвольной входной последовательности
, так как
,
Подставляя, полученные ранее значения коэффициентов импульсной характеристики (3.25) в уравнения , получаем следующие коэффициенты откликов:
;
(3.26)
Из уравнения (3.26) следует, рекурсивная линейная система первого порядка это устройство выполнения свертки, называемое конвольвером. Весовые коэффициенты конвольвера (уравнения 3.25) соответствуют коэффициентам импульсной характеристики
|
. |
На рисунке 3.16 показана структурная схема, реализующая конвольвер |
|
на основе уравнения |
. |
Рисунок 3.16 – Структурная схема конвольвера
Пример 3.12. Вычислить коэффициенты на выходе конвольвера, описываемого уравнением
|
|
, если |
Решение. Отклик конвольвера описывается уравнением |
||
Параметры |
и |
определяют значения импульсной характеристики |
конвольвера: |
|
|
|
|
; |
Коэффициенты |
|
определяем из выражения (3.26) |
.
Легко убедиться, что схема, показанная на рисунке 3.16 это
вычислитель свертки. На выходе схемы формируются значения

На рисунке 3.17 изображен график свертки.
h(n)
7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
-1 |
|
|
|
|
|
|
|
|
0 |
1 |
2 |
3 |
4 |
||||
-2 |
||||||||
|
|
|
|
|
|
|
||
-3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
-4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
-5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
-6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
-7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
n
Рисунок 3.17 – График свертки
Структура разностного уравнения определяет способ построения рекурсивной линейной системы. Например, уравнение первого порядка можно реализовать с помощью схемы, изображенной на рисунке 3.18.
Рисунок 3.18 – Схема рекурсивной линейной системы
Упражнения.
3.6.Записать уравнение рекурсивной ЛДС второго порядка.
3.7.Вычислить импульсную характеристику рекурсивной системы и
отклик |
для произвольного входа |
. Соотношение вход-выход ЛДС |
описывается уравнением |
|
|
3.8.Показать, что разностное уравнение описывает конвольвер.
3.9.Изобразить структурную схему рекурсивной ЛДС второго порядка.
3.7.2. Нерекурсивные линейные дискретные системы
Определение 3.4. Линейная дискретная система называется нерекурсивной, если все коэффициенты уравнения (3.18) равны нулю. В этом случае уравнение (3.18) принимает вид
(3.27)
Из уравнения (3.27) следует, что n -е значение отклика нерекурсивной ЛДС в каждый момент времени определяется:
–текущим значением отсчета входа;
–предыдущим значением отсчета входа;
Например, разностное уравнение нерекурсивной ЛДС второго порядка имеет вид
.
Пример 3.13. Вычислим импульсную характеристику нерекурсивной системы второго порядка
для |
(3.28) |
Согласно определению, импульсная характеристика – это отклик на
единичный импульс, поэтому на входе действует |
и |
|
соответствует |
С учетом этого, получаем |
|
|
|
. |
Методом прямой подстановки вычисляем значения отсчетов импульсной характеристики
(3.29)
, при
Выводы.
1. Импульсная характеристика нерекурсивной линейной дискретной системы имеет конечную длительность.
2. Значения отсчетов равны коэффициентам разностного уравнения
3. Нерекурсивные ЛДС относятся к классу КИХ систем (фильтров).
Вычислим отклик нерекурсивной линейной системы, описываемой уравнением (3.28) для произвольной входной последовательности С учетом полученных значений коэффициентов импульсной характеристики (3.29), имеем для уравнения :
(3.30)
Пример 3.14. Вычислить коэффициенты на выходе схемы, описываемой уравнением
если
Решение. Отклик описывается уравнением
Параметры |
и |
определяют значения импульсной характеристики |
конвольвера: |
|
|
|
|
; |
Коэффициенты |
|
определяем из выражения (3.30) |
.
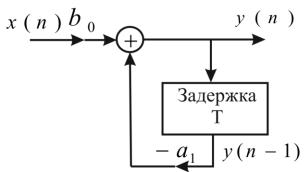
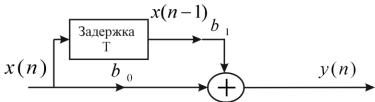
Структура разностного уравнения определяет способ построения нерекурсивной линейной системы. Например, уравнение первого порядка можно реализовать с помощью схемы,
изображенной на рисунке 3.19.
Рисунок 3.19 – Схема нерекурсивной линейной системы (конвольвер)
Легко убедиться, что схема, показанная на рисунке 3.16 это вычислитель свертки. На выходе схемы формируются значения На рисунке 3.20 изображен график свертки.