

TAU_lab_rab_3_kurs_1_semestr-2008
.pdf5.3. помилки від керуючого впливу EUЗ (s) = |
|
ε(s) |
|
; |
||
|
UЗ(s) |
|||||
|
|
|
|
|||
5.4. помилки від обурюючого впливу EIC (s) |
= |
ε(s) |
. |
|||
|
||||||
|
|
|
IC (s) |
|||
Для одержання передатної функції по структурній алгоритмічній |
||||||
схемі, зібраної в Simulink, необхідно використовувати |
команду ss2tf |
|||||
(опис команди ss2tf див. Додаток 1), попередньо замінивши необхідні вхідну і вихідну координату досліджуваної системи блоками вхідного (Inport) і вихідного (Outport) портів відповідно (див. Додаток 4, рис. П 4.1 і програму реалізації передатних функцій по структурній алгоритмічній схемі).
6.Дослідити вихідну нескоректовану АСК на стійкість:
6.1.по перехідній функції ωдв = f(t) замкнутої АСК;
6.2.за алгебраїчним критерієм Гурвіца для замкнутої АСК;
6.3.за частотним критерієм Михайлова;
6.4.за частотним критерієм Найквіста (годограф; ЛАЧХ і
ЛФЧХ).
Для побудови в одному графічному вікні перехідного процесу досліджуваної системи (п. 6.1) і її частотних характеристик (п. 6.4) використовується інтерактивний спостерігач ltiview (див. Додаток 1 – Використання Simulink LTI-Viewer для аналізу динамічних систем (за структурною схемою) і Додаток 4 – Методичний приклад роботи команди ltiview
упакеті MATLAB для побудови перехідного процесу і частотних характеристик для визначення стійкості АСК за критерієм Найквіста (по передатній функції)).
Приклад дослідження АСК на стійкість за алгебраїчним критерієм
Гурвіца (п. 6.2) і частотному критерію Михайлова (п. 6.3) показаний у Додатку 4 – Методичний приклад визначення стійкості АСК за алгебраїчним критерієм Гурвіца та частотному критерію Михайлова в пакеті
MATLAB.
7. Застосувавши або метод кореневого годографа (див. Додаток 5) або метод логарифмічних частотних характеристик – метод В.В. Солодовнікова (див. Додаток 6) визначити передатну функцію коригувального пристрою (КП), що забезпечує задані показники якості перехідного про-
21
цесу (варіанти представлені у табл. 3.1).
Застосування методу кореневого годографа обумовлено залежністю поводження лінійної АСК від полюсів і нулів її передатної функції. Під полюсами маються на увазі коріння полінома знаменника b(s), а під нулями – корінь полінома чисельника a(s). Поліном b(s) називається також характеристичним багаточленом передатної функції
W(s)= |
a |
0 |
s3 |
+a s2 |
+a |
2 |
s +a |
3 |
|
a(s) |
|
|
|
|
1 |
|
|
= |
|
|
. |
||||
b |
|
|
+ b s2 |
+ b |
|
|
|
b(s) |
||||
|
0 |
s3 |
2 |
s + b |
3 |
|
|
|||||
|
|
|
1 |
|
|
|
|
|
|
|||
Розташування полюсів W(s) на комплексній площині визначає стійкість САК, а в сукупності з нулями – вид імпульсної функції k(t) і перехідної функції h(t).
Метод кореневого годографа дозволяє знаходити полюси і нулі передатної функції замкнутої системи, маючи в розпорядженні полюси і нулі розімкнутої системи при зміні коефіцієнта підсилення розімкнутої системи Краз, а також дозволяє підібрати розташування полюсів і нулів передатної функції коригувальних ланок, визначити параметри домінуючих полюсів САК (найближчих до початку координат площини s).
8.Коригувальну ланку з підібраною передатною функцією обраную по методу В.В. Солодовнікова включити послідовно з основними ланками досліджуваної АСК. Виконати розрахунок скоригованої АСК, зберігаючи графічні результати розрахунків у вигляді файлів.
9.Побудувати ЛАЧХ і ЛФЧХ скоригованої АСК та визначити запас стійкості системи по амплітуді ∆L і по фазі ∆φ.
10.Оформити звіт про лабораторну роботу.
11.Одержати оцінку результатів своєї роботи у викладача, відповівши на його контрольні питання.
3.3.Питання для самоконтролю
17.Дайте визначення передатної функції.
18.Дайте визначення коефіцієнта передачі розімкнутої АСК.
19.Пояснить принцип роботи АСК стабілізації частоти обертання ДПС НЗ.
20.Запишіть передатні функції АСК стабілізації частоти обертання ДПС НЗ по що задаючому та обурюючому впливам, помилки від керую-
22

чого впливу, помилки від обуюючого впливу.
21.Дайте визначення стійкості АСК. Сформулюйте теореми Ляпу-
нова.
22.Назвіть і сформулюйте алгебраїчні та частотні критерії визначення стійкості АСК.
23.Як визначити стійкість замкнутої АСК по виду корінь характеристичного полінома частотної передатної функції (без побудови годографа) за критерієм Михайлова?
24.Як визначити запас стійкості системи по амплітуді та фазі по ЛАЧХ і ЛФЧХ, застосувавши критерій Найквіста?
25.Перелічите основні показники якості АСК та запишіть їхні математичні вирази.
26.Як по виду кривої перехідного процесу оцінити стійкість АСК та показники якості?
27.Яке розташування коренів характеристичного рівняння системи крапками на комплексній площині є умовою стійкості лінійної системи?
28.Що таке коефіцієнт статизму і як його розрахувати?
29.Як визначити порядок астатизму системи?
30.Укажіть методи підвищення порядку астатизму системи.
31.Що називається статичною помилкою вихідної координати?
32.Що таке похибка регулювання АСК?
33.Пояснить, у яких випадках необхідно встановлювати коригувальні пристрої.
34.Які види коригувальних пристроїв ви знаєте?
35.Поясните принцип визначення послідовного коригувального пристрою побудованого по методу В.В. Солодовнікова.
36.Назвіть кореневі критерії якості перехідного процесу.
23
Таблиця 3.1. – Необхідні показники якості перехідного процесу
Час пе-
№Припустиме рехідно-
п/п |
перерегулювання |
го |
|
σmax, % |
процесу |
|
|
tрег, с |
|
|
|
1 |
2 |
3 |
1 |
25,0 |
0,25 |
|
|
|
2 |
4,3 |
0,2 |
|
|
|
3 |
5,0 |
0,2 |
|
|
|
4 |
5,0 |
0,2 |
|
|
|
5 |
4,3 |
0,2 |
|
|
|
6 |
8,0 |
0,25 |
|
|
|
7 |
7 |
0,3 |
|
|
|
8 |
4,3 |
0,25 |
|
|
|
9 |
10,0 |
0,3 |
|
|
|
10 |
4,3 |
0,25 |
|
|
|
11 |
4,3 |
0,25 |
|
|
|
12 |
4,3 |
0,2 |
|
|
|
13 |
8,0 |
0,25 |
|
|
|
14 |
5,0 |
0,25 |
|
|
|
15 |
4,3 |
0,25 |
|
|
|
16 |
4,3 |
0,2 |
|
|
|
17 |
16 |
0,4 |
|
|
|
18 |
16 |
0,4 |
|
|
|
19 |
9,0 |
0,25 |
|
|
|
20 |
8,0 |
0,25 |
|
|
|
Час пе-
№Припустиме рехідно-
п/п |
перерегулювання |
го |
|
σmax, % |
процесу |
|
|
tрег, с |
|
|
|
1 |
2 |
3 |
21 |
4,3 |
0,2 |
|
|
|
22 |
4,3 |
0,2 |
|
|
|
23 |
4,3 |
0,2 |
|
|
|
24 |
20,0 |
0,25 |
|
|
|
25 |
10,0 |
0,2 |
|
|
|
26 |
10,0 |
0,2 |
|
|
|
27 |
6,0 |
0,2 |
|
|
|
28 |
15,0 |
0,3 |
|
|
|
29 |
12,0 |
0,3 |
|
|
|
30 |
10,0 |
0,2 |
|
|
|
31 |
18,0 |
0,3 |
|
|
|
32 |
20,0 |
0,3 |
|
|
|
33 |
12,0 |
0,25 |
|
|
|
34 |
16,0 |
0,25 |
|
|
|
35 |
20,0 |
0,3 |
|
|
|
36 |
14,0 |
0,3 |
|
|
|
37 |
18,0 |
0,35 |
|
|
|
38 |
18,0 |
0,3 |
|
|
|
39 |
20,0 |
0,35 |
|
|
|
40 |
10,0 |
0,25 |
|
|
|
24
ДОДАТОК 1
Використання пакету MATLAB та його розширення Simulink при аналізі систем автоматичного керування
Програма Simulink - це частина пакету MATLAB, призначена для моделювання динамічних систем. Основою для розробки моделей в Simulink є бібліотеки блоків, з яких складаються структурні схеми досліджуваних систем. Розрахунок перехідних процесів може бути виконаний за допомогою відповідних операцій Simulink-Меню або в програмному режимі, використовуючи функції пакету MATLAB.
Середовище пакету MATLAB дозволяє моделювати динамічні процеси в системі по її структурній схемі, одержати математичний опис моделі в різній формі, виконати аналіз її властивостей у часовій і в частотної областях, синтезувати елементи системи керування, виконати оптимізацію.
1. Запуск Simulink
Для запуску програми Simulink необхідно попередньо запустити пакет MATLAB (У комп'ютерах навчального обчислювального центра ярлик MATLAB розміщений на робочому столі).
Запустити програму Simulink можна одним із трьох способів:
•нажати кнопку Simulink на панелі інструментів командного ві-
кна MATLAB;
•у командному рядку головного вікна MATLAB на клавіатурі надрукувати Simulink і нажати клавішу Enter;
•виконати команду Open…у меню File і відкрити файл моделі
(mdl - файл).
Останній спосіб зручно використовувати для запуску вже готової та налагодженої моделі, коли необхідно лише провести розрахунки й не потрібно додавати нові блоки в модель.
Використання першого та другого способів приводить до відкриття вікна бібліотеки – Simulink Library Browser, до основних розділів якої необхідно звернутися при виконанні роботи.
25
2. Бібліотека блоків Simulink
Список розділів бібліотеки Simulink представлений у вигляді дерева, і правила роботи з ним є загальними для списків такого виду. При виборі відповідного розділу бібліотеки в правій частині вікна відображається його зміст.
Simulink містить наступні бібліотеки блоків: Continuous – безперервні (лінійні) блоки;
Discontinuities – нелінійні блоки;
Discrete – дискретні блоки.
Look-Up-Table – блоки апроксимації та інтерполяції; Math Operations – блоки математичних операцій; Model Verification – перевірка адекватності моделі;
Model-Wide Utilities – утиліти (настроювання) до моделі в цілому; Port & Subsystems – вхід (вихід) підсистем;
Signal Attributes – властивості сигналів; Signal Routing – розподіл сигналів; Sinks – реєструючи пристрої;
Sources — джерела сигналів і впливів.
2.1. Continuous
Ця бібліотека містить лінійні безперервні ланки:
¾Блок обчислення похідній - Derivative - (du/dt)
Виконує чисельне диференціювання вхідного сигналу по наближеній формулі Ейлера. Тут u - величина зміни вхідного сигналу за поточне значення кроку часу моделювання t.
Значення вхідного сигналу блоку до початку розрахунку вважається рівним нулю. Початкове значення вихідного сигналу також покладається рівним нулю.
Точність обчислення похідній суттєво залежить від величини встановленого кроку розрахунку. Вибір меншого кроку розрахунку поліпшує точність обчислення похідній.
¾Інтегруючий блок - lntegrator - (1/s)
Виконує інтегрування вхідного сигналу із заданою початковою
26

умовою.
Параметри:
External reset – Зовнішнє скидання. Тип зовнішнього керуючого сигналу, який забезпечує скидання інтегратора до початкового стану. Вибирається зі списку:
none - немає (скидання не виконується);
rising - наростаючий сигнал (передній фронт сигналу); falling - спадаючий сигнал (задній фронт сигналу); either - наростаючий або спадаючий сигнал;
level - не нульовий рівень сигналу (скидання виконується, при умові якщо сигнал на керуючому вході не буде рівним нулю).
У тому випадку, якщо обрано який-небудь (але не none), тип керуючого сигналу, то на зображенні блоку з'являється додатковий керуючий вхід. Поруч із додатковим входом буде показана умовна позначка керуючого сигналу.
Initial condition source – Джерело початкового значення вихідного сигналу. Вибирається зі списку:
internal - внутрішній;
external – зовнішній. У цьому випадку на зображенні блоку з'являється додатковий вхід, позначений x0, на який необхідно подати сигнал, який задає початкове значення вихідного сигналу інтегратора.
Initial condition – Початкова умова. Установка початкового значення вихідного сигналу інтегратора. Параметр доступний, якщо обрано внутрішнє джерело початкового значення вихідного сигналу.
Limit output (прапорець) – Використання обмеження вихідного сиг-
налу.
Upper saturation limit – Верхній рівень обмеження вихідного сигналу. Може бути заданий як числом, так і символьною послідовністю inf, тобто плюсом (+) .
Lower saturation limit – Нижній рівень обмеження вихідного сигналу. Може бути заданий як числом, так і символьною послідовністю inf, тобто мінусом (–) .
Show saturation port – управляє відображенням порту, що виводить сигнал, який свідчить про вихід інтегратора на обмеження. Вихідний сигнал даного порту може приймати наступні значення:
27
Нуль, якщо інтегратор не перебуває на обмеженні; +1, якщо вихідний сигнал інтегратора досяг верхньої обмежуючої
межі; -1, якщо вихідний сигнал інтегратора досяг нижньої обмежуючої
межі.
Show state port (прапорець) – Відобразити/сховати порт стану блоку. Даний порт використовується в тому випадку, якщо вихідний сигнал інтегратора потрібно подати як сигнал зворотного зв'язку цього ж інтегратора. Наприклад, при установці початкових умов через зовнішній порт або при скиданні інтегратора через порт скидання. Вихідний сигнал із цього порту може використовуватися також для організації взаємодії з керованою підсистемою.
Absolute tolerance – Абсолютна погрішність.
|
|
1 |
|
¾ |
Блок передатної функції – Transfer Fcn – |
|
|
|
|||
|
s +1 |
|
|
Реалізує передатну функцію загального виду як відношення поліномів чисельника та знаменника:
W( s ) = b0 sm +b1sm−1 +...+bm−1s +bm . a0 sn +a1sn−1 +...+an−1s +an
Вхідними параметрами є вектори коефіцієнтів статечних поліномів чисельника (Numerator) і знаменника (Denominator), які розміщенні в порядку убування ступенів оператора Лапласа s (починаючи з коефіцієнта b0 (або a0 ) при старшому ступені s полінома), записані через пробіл.
Порядок чисельника повинен бути менше або дорівнювати порядку знаменника.
Початкові умови при використанні блоку Transfer Fcn покладаються нульовими.
2.2. Math Operations
¾Підсилювачі - Gain
Виконують множення вхідного сигналу на постійний коефіцієнт.
28

Параметри:
Gain – Коефіцієнт передачі.
Multiplication – Спосіб виконання операції. Може приймати значення зі списку:
element-wise K·u – поэлементный;
matrix K·u – матричний. Коефіцієнт підсилювача являє собою лівостороннім операндом;
matrix u·K – матричний. Коефіцієнт підсилювача являє собою правостороннім операндом.
Saturate on integer overflow (прапорець) – Придушувати переповнення цілого. При встановленому прапорці обмеження сигналів цілого типу виконується коректно.
Параметр блоку Gain може бути позитивним або негативним числом, як більше, так і менше 1. Коефіцієнт передачі можна задавати у вигляді скаляра, матриці або вектора, а також у вигляді обчислювального виразу . За замовчуванням коефіцієнт підсилення є дійсним числом типу double.
¾ Блок множення поточних значень сигналів – Product Обчислює скалярний добуток вхідних векторів однакової розмірно-
сті.
Параметри:
Number of inputs – Кількість входів. Може задаватися як число або як список знаків. У списку знаків можна використовувати знаки помножити (*) и розділити (/).
Multiplication – Спосіб виконання операції. Може приймати значення зі списку:
element-wise - заелементний; matrix - матричний.
Saturate on integer overflow (прапорець) – Придушувати переповнення цілого. При встановленому прапорці обмеження сигналів цілого типу виконується коректно.
Якщо параметр Number of inputs заданий списком, який включає знаки множення та ділення, то мітки входів будуть позначені символами відповідних операцій.
29
¾ Блок обчислення суми поточних значень сигналів - Sum Сприймає тільки скалярні вхідні сигнали та підсумує ці сигнали з
відповідними знаками.
Параметри:
Icon shape – Форма блоку. Вибирається зі списку: round - окружність;
rectangular - прямокутник.
List of sign – Список знаків. У цьому полі визначається також кількість входів до блоку. У цьому випадку всі входи будуть підсумовуватися. Якщо кількість входів блоку перевищує 3, то зручніше використовувати блок Sum прямокутної форми. У списку можна використовувати наступні знаки:
плюс (+); мінус (–);
роздільник знаків (|).
Saturate on integer overflow (прапорець) – Придушувати переповнення цілого. При встановленому прапорці обмеження сигналів цілого типу виконується коректно.
2.3. Signal Routing
Ця бібліотека містить блоки, призначені для з'єднання між собою окремих фрагментів моделі.
¾Мультиплексор - Mux
Поєднує декілька скалярних або векторних вхідних сигналів в один векторний сигнал. Розмірність результуючого векторного сигналу дорівнює сумарній кількості елементів, що надходять на вхідні порти блоку.
Параметри:
Number of Inputs - Кількість входів.
Display option - Спосіб відображення. Вибирається зі списку:
none - прямокутник з білим фоном без відображення міток вхідних сигналів;
signals - прямокутник з білим фоном і відображенням міток вхідних сигналів;
bar - вертикальний вузький прямокутник чорного кольору. Прикладом застосування блоку Mux може бути об'єднання декіль-
30

кох вихідних сигналів в один для виходу їхніх графіків в одній системі координат за допомогою одного із графобудівників бібліотеки Sinks.
¾Демультиплексор - Demux
Розкладає векторний сигнал будь-якої розмірності на кілька скалярних сигналів. Кількість виходів повинна відповідати розмірності вхідного вектору.
Параметри:
Number of Outputs – Кількість виходів.
Bus Selection Mode (прапорець) – Режим розподілу векторних сигналів.
¾Блок ручного перемикача - Manual Switch
Виконує перемикання вхідних сигналів по команді користувача. Командою на перемикання є подвійне клацання лівою клавішею “миші” на зображенні блоку. При цьому зображення блоку змінюється, показуючи, який вхідний сигнал у цей момент проходить на вихід блоку. Перемикання блоку можна виконувати як до початку моделювання, так і в процесі розрахунку.
2.4. Sinks
Бібліотека реєструючих елементів призначена для запам'ятовування результатів моделювання або для їхнього графічного відображення.
¾ Пристрій виводу на екран дисплея - Display time
Відображає значення сигналу у вигляді числа. Може використовуватися для відображення не тільки скалярних сигналів, але також векторних, матричних і комплексних. Якщо всі відображувальні значення не можуть поміститися у вікні блоку, у правому нижньому куті блоку з'являється символ, який вказує на необхідність збільшити його розміри.
Параметри:
Format – формат відображення даних. Вибирається зі списку: short - число складається з 5 значущих десяткових цифр; long - число складається з 15 значущих десяткових цифр;
short_e - число складається з 5 значущих десяткових цифр і 3 символами ступеня десяти;
31
long_e - число складається з 15 значущих десяткових цифр і 3 символами ступеня десяти;
bank - "грошовий" формат. Формат з фіксованою крапкою та двома десятковими цифрами в дробовій частині числа.
Decimation – кратність відображення вхідного сигналу. Може приймати наступні значення:
1 - відображається кожне значення вхідного сигналу;
2 - відображається кожне друге значення вхідного сигналу; 3 - відображається кожне третє значення вхідного сигналу й т.д.
Sample time – крок часу моделювання. Визначає дискретність відображення даних.
Floating display (прапорець) – перехід блоку в “вільний” режим. У даному режимі вхідний порт блоку відсутній, а вибір сигналу для відображення виконується клацанням лівої клавіші “миші” на відповідній лінії зв'язку. У цьому режимі для параметра розрахунку Signal storage reuse повинне бути встановлене значення off (закладка Advanced у вікні діалогу Simulation parameters…)...
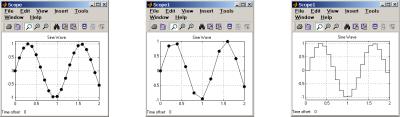
¾Осцилограф – Scope
Дозволяє спостерігати за змінами досліджуваних сигналів у процесі моделювання та відображає їх у вигляді графіків у функції часу.
Для того щоб відкрити вікно перегляду сигналів необхідно виконати подвійне клацання лівою клавішею “миші” на зображенні блоку. Це можна зробити на будь-якому етапі розрахунку (як до початку розрахунку, так і після нього, а також під час розрахунку). У тому випадку, якщо на вхід блоку надходить векторний сигнал, то крива для кожного елементу вектора будується окремим кольором.
Настроювання вікна осцилографа виконується за допомогою панелі інструментів, представленої на рис. П.1.1., де
|
1 |
- Print – пе- |
||
|
чать |
змісту |
вікна |
|
|
осцилографа; |
|
||
|
2 |
- |
Parameters |
|
Рис. П. 1.1. Панель інструментів блоку Scope |
– доступ |
до |
вікна |
|
32 |
|
|
|
|
настроювання параметрів;
3 - Zoom – збільшення масштабу по обох осях;
4 - Zoom X-axis – збільшення масштабу по горизонтальній осі; 5 - Zoom Y-axis – збільшення масштабу по вертикальній осі; 6 - Autoscale – автоматична установка масштабів по обох осях;
7 - Save current axes settings – збереження поточних настроювань вікна;
8 - Restore saved axes settings – установка раніше збережених настроювань вікна;
9 - Floating scope – перехід осцилографа в “вільний” режим;
10 - Unlock axes selection – розірвати зв'язок між поточною координатною системою вікна і відображуваним сигналом. Інструмент доступний, якщо включено режим Floating scope.
11 - Signal selection – вибір сигналів для відображення. Інструмент доступний, якщо включено режим Floating scope.
9Вікно Parameters
У даному вікні встановлюються параметри осцилографа. Вікно параметрів має дві закладки:
General – загальні параметри.
Параметри:
Number of axes – число входів (систем координат) осцилографа. При зміні цього параметру на зображенні блоку з'являються додаткові вхідні порти.
Time range – величина часового інтервалу, для якого відображаються графіки. Якщо час розрахунку моделі перевищує задане параметром Time range, то вихід графіка виробляється порціями, при цьому інтервал відображення кожної порції графіка дорівнює заданому значенню
Time range.
Tick labels – вихід/приховання і міток осей. Вибирається зі списку: all - підпису для всіх осей;
none - відсутність всіх осей і підписів до них;
bottom axis only - підпису горизонтальної осі тільки для нижнього графіку.
Sampling – установка параметрів висновку графіків у вікні. Задає
33
режим виводу розрахункових крапок на екран. Вибирається зі списку: Decimation - кратність виводу встановлюється числом, що задає
крок виведених розрахункових крапок.
Sample time - числове значення виводу розрахункових крапок задається як інтервал квантування при відображенні сигналу.
|
|
|
|
|
Decimation = 1 |
|
Decimation = 2 |
|
Sample time = 0.1 |
Floating scope (прапорець) – перехід осцилографа в “вільний” ре-
жим.
Data history – параметри збереження сигналів у робочій області
MATLAB.
Параметри:
Limit data points to last – максимальна кількість відображуваних розрахункових крапок графіка. При перевищенні цього числа початкова частина графіка відрізається. У тому випадку, якщо прапорець параметра Limit data points to last не встановлений, то Simulink автоматично збільшить значення цього параметру для відображення всіх розрахункових крапок.
Save data to workspace – збереження значень сигналів у робочій об-
ласті MATLAB.
Variable name – ім'я змінної для збереження сигналів у робочій об-
ласті MATLAB.
Format – формат даних при збереженні в робочій області MATLAB. Вибирається зі списку:
Structure with time - структура з додатковим полем “час”; Structure - структура;
Array - масив.
34
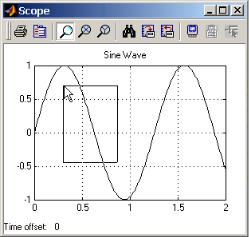
9Вікна Zoom і Autoscale
Зміна масштабів відображуваних графіків можна виконувати декількома способами:
1. Нажати відповідну кнопку (Zoom  , Zoom X-axis
, Zoom X-axis  , Zoom Y-
, Zoom Y-
axis  , Autoscale) або клацнути один раз лівою клавішею “миші” у потрібному місці графіка. Відбудеться 2,5 кратне збільшення масштабу.
, Autoscale) або клацнути один раз лівою клавішею “миші” у потрібному місці графіка. Відбудеться 2,5 кратне збільшення масштабу.
2. Нажати відповідну кнопку (Zoom  , Zoom X-
, Zoom X-
axis  , Zoom Y-axis
, Zoom Y-axis  , Autoscale) або нажавши ліву клавішу “миші”, за допомогою динамічної рамки або відрізка вказати область графіка для збільшеного зображення.
, Autoscale) або нажавши ліву клавішу “миші”, за допомогою динамічної рамки або відрізка вказати область графіка для збільшеного зображення.
3. Клацнути правою клавішею “миші” у вікні графіків і, вибрати команду
Axes properties…у контекс-
тному меню. Відкриється вікно властивостей графіка, у якому за допомогою параметрів Y-min і Y-max можна вказати граничні значення вертикальної осі. У цьому ж вікні можна вказати заголовок графіка (Title), замінивши вираження %<SignalLabel> у рядку вводу.
¾Графобудівник - ХУ Graph
Будує графік одного реєструючого сигналу у функції іншого (графік виду y=f(x)), тобто призначено для побудови фазових портретів, механічних характеристик.
Параметри:
x-min – Мінімальне значення сигналу по осі X; x-max – Максимальне значення сигналу по осі X; y-min – Мінімальне значення сигналу по осі Y; y-max – Максимальне значення сигналу по осі Y;
35
Sample time – крок часу моделювання.
Блок має два входи. Верхній вхід призначений для подачі сигналу, який є аргументом (X), нижній – для подачі значень функції (Y).
¾ Блок збереження даних у робочій області - Те Workspace
Створює матрицю із заданим ім'ям Variable name, що містить значення векторів вхідних сигналів. Кожний реєструючий сигнал записується в окремій стовпець матриці. Один рядок матриці містить стан всіх сигналів у конкретний момент часу.
Параметри:
Variable name – ім'я змінної величини, дані якої потрібно записува-
ти.
Limit data points to last – максимальна кількість розрахункових крапок, що зберігаються, за часом (відлік ведеться від моменту завершення моделювання). У тому випадку, якщо значення параметра Limit data points to last задано як inf, то в робочій області будуть збережені всі дані.
Decimation – кратність запису даних у робочу область.
Sample time – крок часу моделювання. Визначає дискретність запису даних.
Save format – формат збереження даних. Вибирається зі списку: Structure with Time - структура з додатковим полем «час»; Structure – структура. Дані зберігаються у вигляді структури, що
має три поля: time – час, signals – зберігаються значення сигналів, block Name – ім'я моделі або блоку To Workspace. Поле time для даного формату залишається не заповненим;
Array - матриця. Дані зберігаються як масив, у якому число рядків визначається числом розрахункових крапок за часом, а число стовпців - розмірністю вектора, який подається на вхід блоку. Якщо на вхід подається скалярний сигнал, то матриця буде містити лише один стовпець.
¾Блок вихідного порту - Outport
Створює вихідний порт для підсистеми або для моделі верхнього рівня ієрархії.
Параметри:
Port number – номер порту.
36
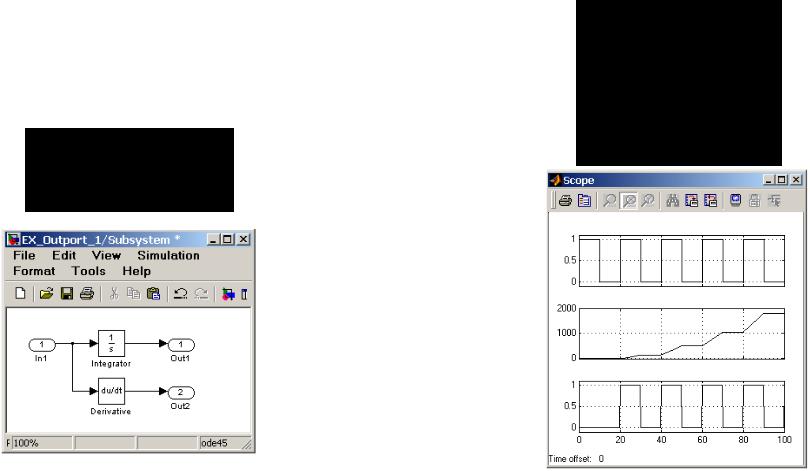

значення задана рівної нулю. Графіки сигналів показують, що коли підсистема заблокована, сигнал першого вихідного порту залишається незмінним, а сигнал другого стає рівним заданому початковому значенню (нулю).
Рис. П.1.4. Модель, що передає сигнали в робочий простір MATLAB за допомогою блоків Outport
У системі верхнього
рівня вихідний порт Outport використовується у двох випадках:
•для передачі сигналу в робочий простір MATLAB.
•для забезпечення зв'язку функцій аналізу з виходами моделі. Для передачі сигналу в робочий простір MATLAB потрібно не тіль-
ки встановити в моделі вихідні порти, але і виконати установку параметрів виводу на закладці Workspace I/O вікна діалогу Simulation parameters…(повинен бути встановлений прапорець для параметра Output і задане ім'я змінної величини для збереження даних). Тип зберігаючих даних - Array масив, Structure (структура) або Structure with time (структура з полем “час”) задається на цій же закладці.
На рис. П.1.4 показана модель, що передає сигнали в робочий прос-
тір MATLAB.
Блок Outport може використовуватися також для зв'язку моделі з функціями аналізу, наприклад: linmod або trim.
2.5. Sources
У цю бібліотеку входить група блоків, які не мають входів, а мають тільки виходи.
¾Джерело постійного сигналу - Constant
Задає постійний за рівнем сигнал, що не залежить від часу.
Параметри:
Constant value – Постійна величина.
Interpret vector parameters as 1-D (прапорець) – Інтерпретувати век-
тор параметрів як одномірний.
Значення константи може бути дійсним або комплексним числом,
39
що обчислюється вираженням, вектором або матрицею.
¾Генератор східчастого сигналу - Step
Забезпечує стрибкоподібну зміну вихідного сигналу між двома постійними рівнями в заданий момент часу.
Параметри:
Step time – Час форму-
вання ступневого сигналу.
Initial value – Рівень початкового значення сигналу.
Final value – Рівень кі-
нцевого значення сигналу.
Sample time – крок часу моделювання. Визначає дискретність запису даних.
Interpret vector parameters as 1-D (прапорець) – Інтерпретувати век-
тор параметрів як одномірний.
Перепад рівня сигналу може бути як у більшу сторону (кінцеве значення більше чим початкове), так і в меншу (кінцеве значення менше ніж початкове). Значення початкового та кінцевого рівнів можуть бути не тільки позитивними, але і негативними.
¾Джерело тимчасового сигналу - Clock
Формує сигнал, величина якого на кожному кроці розрахунку дорівнює поточному часу моделювання.
Параметри
Decimation – Час моделювання або крок, з яким обновляються показання часу на зображенні джерела (якщо встановлено прапорець параметра Display time). Параметр задається як кількість кроків розрахунку. Наприклад, якщо крок розрахунку моделі у вікні діалогу Simulation parameters установлений рівним t = 0,01c , а параметр Decimation блоку
Clock заданий рівним 1000, то відновлення показань часу буде виробля-
40