

ЛР Matlab+Simulink
.pdfПоскольку вход CLR (R-вход триггера) в данной работе не используется, на него следует подать пассивный сигнал – 1, которую можно задать блоком Constant, расположенным в подразделе Sources раздела Simulink библиотеки.
11.Запустить модель на исполнение и сравнить результаты моделирования с прогнозом.
12.На основе заданного D-триггера построить Т- триггер, в том же окне модели создать и запустить соответствующую модель и сделать вывод относительно соотношения частот на входе и выходе триггера.
13.На основе того же D-триггера построить ТVтриггер, в том же окне модели создать и запустить соответствующую модель и сделать вывод относительно сложности реализации, а также типе и месте включения дополнительного логического элемента.
14.Сохранить окно модели под именем DDtr<№
вар.>.mdl.
15.В соответствии с табл. 10 и временными диаграммами рис. 12 получить прогноз работы JK-триггера.
Таблица 10. Параметры JK-триггера
Номер |
|
Активный сигнал |
|
|
варианта N |
вход J |
вход К |
|
С-вход |
1, 9, 17, … |
инверсный |
прямой |
|
срез |
2, 10, 18, … |
прямой |
инверсный |
|
фронт |
3, 11, 19, … |
прямой |
инверсный |
|
cрез |
4, 12, 20, … |
инверсный |
прямой |
|
фронт |
5, 13, 21, … |
инверсный |
инверсный |
|
срез |
6, 14, 22, … |
прямой |
прямой |
|
фронт |
7, 15, 23, … |
прямой |
прямой |
|
срез |
8, 16, 24, … |
инверсный |
инверсный |
|
фронт |
16. Поменять местами сигналы на входах J и K и получить новый прогноз работы заданного триггера.
31
С
t
К
t
J
t
Рис. 12. Сигналы на входах JK-триггера
17. Создать модель как показано на рис. 13 и настроить параметры моделирования.
Библиотечный JK-триггер имеет прямые входы J и К, а активным сигналом по входу С является срез тактового им-
Рис. 13. Модель JK-триггера
пульса. Для имитации противоположных активных сигналов достаточно использовать инверторы NOT.
Согласно рис. 12 генератор тактов Clock должен быть настроен на условный период следования тактов, равный 1, Clock1 – на условный период, равный 2, а Clock2 – на условный период, равный 3.
32
18.Для каждого из вариантов сигналов на входах J и К запустить модель на исполнение и сравнить результаты моделирования с соответствующими прогнозами.
19.На основе заданного JK-триггера построить Т- и TV-триггер, в том же окне модели создать и запустить соответствующие модели и сделать вывод относительно сложности реализации по сравнению с п.п.12 и 13 данной работы.
14. Сохранить окно модели под именем JKtr<№ вар.>.mdl.
5. ПОСЛЕДОВАТЕЛЬНОСТНЫЕ ЦИФРОВЫЕ УСТРОЙСТВА (ПЦУ)
Используются в различных управляющих устройствах, а также для хранения и преобразования информации, представленной в цифровой форме.
Подготовка к работе
По указанной выше литературе изучить:
модели и способы задания ПЦУ;
методику синтеза ПЦУ.
Задания и методические указания к их выполнению
1. Из табл. 11 в соответствии с номером варианта N выбрать параметры графа переключений (рис. 14, где ti – i-й такт цикла работы ПЦУ).
Таблица 11. Параметры графа переключений ПЦУ
N |
|
Состояния ПЦУ |
|
Состояния выхода |
||||||
Q0 |
|
Q1 |
Q2 |
|
Q3 |
Y0 |
Y1 |
Y2 |
Y3 |
|
|
|
|
||||||||
1 |
0 |
|
3 |
4 |
|
7 |
6 |
4 |
3 |
1 |
2 |
1 |
|
4 |
5 |
|
2 |
5 |
3 |
7 |
0 |
3 |
2 |
|
0 |
6 |
|
1 |
4 |
7 |
1 |
5 |
4 |
3 |
|
1 |
7 |
|
4 |
3 |
0 |
6 |
1 |
33
5 |
4 |
7 |
2 |
3 |
2 |
5 |
0 |
7 |
6 |
5 |
6 |
3 |
0 |
0 |
6 |
2 |
7 |
7 |
6 |
2 |
1 |
5 |
7 |
1 |
4 |
6 |
8 |
7 |
5 |
0 |
6 |
1 |
2 |
5 |
3 |
9 |
0 |
5 |
4 |
3 |
5 |
0 |
7 |
4 |
10 |
1 |
6 |
3 |
4 |
4 |
5 |
2 |
1 |
11 |
2 |
1 |
0 |
7 |
3 |
6 |
1 |
0 |
12 |
3 |
4 |
5 |
0 |
2 |
7 |
4 |
3 |
13 |
4 |
0 |
2 |
6 |
1 |
2 |
5 |
6 |
14 |
5 |
2 |
7 |
1 |
0 |
1 |
6 |
5 |
15 |
6 |
7 |
1 |
5 |
7 |
4 |
0 |
2 |
16 |
7 |
3 |
6 |
1 |
6 |
3 |
1 |
7 |
17 |
0 |
1 |
6 |
5 |
1 |
4 |
5 |
2 |
18 |
1 |
4 |
3 |
6 |
2 |
3 |
6 |
1 |
19 |
2 |
7 |
0 |
3 |
3 |
1 |
7 |
4 |
20 |
3 |
6 |
1 |
0 |
4 |
7 |
0 |
3 |
21 |
4 |
3 |
7 |
1 |
5 |
6 |
3 |
0 |
22 |
5 |
0 |
2 |
4 |
6 |
2 |
1 |
5 |
23 |
6 |
2 |
5 |
7 |
7 |
0 |
4 |
6 |
24 |
7 |
5 |
4 |
2 |
0 |
5 |
2 |
7 |
25 |
0 |
5 |
2 |
7 |
1 |
6 |
3 |
4 |
26 |
2 |
5 |
6 |
7 |
2 |
5 |
0 |
7 |
27 |
3 |
0 |
6 |
1 |
3 |
4 |
5 |
6 |
28 |
4 |
2 |
1 |
5 |
4 |
5 |
2 |
7 |
29 |
5 |
3 |
2 |
0 |
5 |
6 |
7 |
1 |
30 |
6 |
4 |
3 |
1 |
6 |
4 |
3 |
5 |
34
|
|
|
Y1 |
|
|
|
Y0 |
t1 Q1 |
t2 |
Y2 |
|
t0 |
|
|
|
||
Q0 |
|
|
|
Q2 |
|
|
t4 |
Y3 |
t3 |
||
|
|
|
|||
|
|
|
|
|
|
|
|
|
Q3 |
|
|
Рис. 14. Граф переключений ПЦУ
2. На основе только анализа автоматной таблицы записать минимальные функции переходов и выходов. При этом в качестве запоминающих элементов ПЦУ использовать D-триггеры с динамическим управлением.
Для примера рассмотрим задачу синтеза ПЦУ, граф переключений которого имеет следующие параметры:
|
Состояния ПЦУ |
|
Состояния выхода |
||||||
Q0 |
|
Q1 |
Q2 |
|
Q3 |
Y0 |
Y1 |
Y2 |
Y3 |
1 |
|
2 |
3 |
|
0 |
0 |
1 |
2 |
3 |
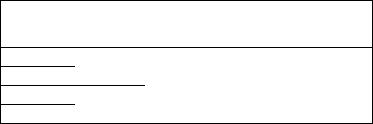
Соответствующий граф переключений имеет вид:
|
|
|
1 |
|
|
|
0 |
t1 |
2 |
t2 |
2 |
t0 |
|
|
|
||
1 |
|
|
|
3 |
|
|
t4 |
|
t3 |
||
|
|
3 |
|
||
|
|
|
|
|
|
|
|
|
0 |
|
|
Как видно, максимальным является третье состояние ПЦУ. Следовательно, количество запоминающих элементов (триггеров) Nт = Log2(3) = 2.
В качестве модели ПЦУ примем автомат Мура, запоминающими элементами которого, согласно заданию, являются D-триггеры с динамическим управлением. Тогда
35
автоматная таблица, соответствующая графу переключений, будет иметь вид:
|
№ |
|
Состояние |
Сигналы |
|
|
Состояние |
|
||||||
|
|
триггеров |
управления |
|
|
|
выхода |
|
|
|||||
|
состояния |
|
|
|
|
|
|
|||||||
|
|
q1 |
|
q0 |
a1 = D1 |
a0 = D0 |
|
|
у1 |
|
у0 |
|
||
|
|
|
|
|
|
|
|
|||||||
|
1 |
|
0 |
|
1 |
1 |
0 |
|
0 |
|
0 |
|
||
|
2 |
|
1 |
|
0 |
1 |
1 |
|
0 |
|
1 |
|
||
|
3 |
|
1 |
|
1 |
0 |
0 |
|
1 |
|
0 |
|
||
|
0 |
|
0 |
|
0 |
0 |
1 |
|
1 |
|
1 |
|
||
|
На основании этой таблицы можно сразу записать си- |
|||||||||||||
стемы минимальных функций переходов и выходов: |
|
|
||||||||||||
|
|
D q , |
|
y q D , |
|
|
||||||||
|
|
|
0 0 |
, |
0 |
0 |
0 |
|
|
|
|
|
||
|
|
D1 q0 q1 |
y1 q0 ~ q1 D1. |
|
|
|||||||||
3.С помощью любого из методов минимизации убедиться в достоверности полученных ФАЛ.
4.Разработать структурную схему устройства.
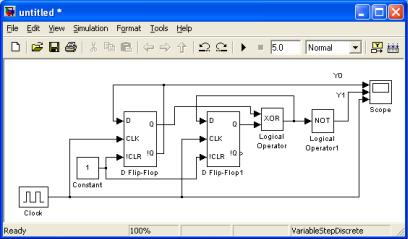
5. В системе MATLAB создать соответствующую модель устройства и сохранить ее под именем pcu.mdl.
Так, модель ПЦУ рассмотренного примера приведена на рисунке:
36
6. Запустить модель и сравнить диаграммы на экране «осциллографа» с данными таблицы выходов.
Процесс настройки параметров моделирования приведен в пункте 6 работы 2, а также в предыдущей работе.
Может случиться, что таблица выходов совпадает с «осциллограммами» лишь через некоторое количество тактов. Это вполне соответствует реальной ситуации, поскольку в момент запуска устройство устанавливается в произвольное состояние, что обусловливает переходный процесс.
6. ТИПОВЫЕ ПЦУ
Применяются для подсчета количества тактовых импульсов, уменьшения частоты их следования в заданное число раз, хранения и/или преобразования двоичных наборов путем поразрядной инверсии либо сдвига.
Подготовка к работе
По указанной выше литературе изучить:
типы базовых триггеров асинхронных и синхронных счетчиков, буферных регистров и регистров сдвига;
37
способы реализации базовых триггеров счетчиков на D- и JK-триггерах;
принципы построения асинхронных и синхронных счетчиков;
принципы и особенности реализации счетчиков с произвольным модулем счета и начальным состоянием;
принципы построения регистров.
Задания и методические указания к их выполнению
1. На D-триггерах разработать структурную схему асинхронного счетчика с параметрами, заданными в табл. 12 – 14 согласно номера варианта N. Направление счета – прямое для четных N и обратное для нечетных N.
Таблица 12. Параметры триггеров счетчика
N
1,2,17,18
9,10,25,26
5,6,21,22
13,14,29
Активный |
Вход |
|
Активный |
|||||||||||||
сигнал |
D |
N |
|
|
сигнал |
|||||||||||
C |
R |
|
|
C |
R |
|||||||||||
|
|
|
|
|||||||||||||
|
|
|
|
|
|
0 |
инверс- |
ный |
3,4,19,21 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
1 |
11,12,27,28 |
|
|
|
|
|
|
1 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
0 |
|
|
7,8,23,24 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
1 |
|
|
15,16,30 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 13. Модуль счета Кс
Вход
D
прямой
|
|
N |
Кс |
|
|
|
N |
|
|
Кс |
|
N |
|
|
Кс |
|
||||
|
1,3,5,7,9 |
13 |
|
11,13,15,17,19 |
|
|
9 |
|
21,23,25,27,29 |
|
11 |
|
||||||||
|
2,4,6,8,10 |
10 |
|
12,14,16,18,20 |
|
|
7 |
|
22,24,26,28,30 |
|
12 |
|
||||||||
|
|
|
Таблица 14. Начальное состояние Qн |
|
|
|||||||||||||||
|
N |
Qн |
N |
Qн |
N |
Qн |
|
|
|
N |
Qн |
N |
Qн |
|
||||||
|
1,2 |
|
1 |
7,8 |
|
|
4 |
13,14 |
|
7 |
|
|
19,20 |
10 |
25,26 |
13 |
|
|||
|
3,4 |
|
2 |
9,10 |
|
5 |
15,16 |
|
8 |
|
|
21,22 |
11 |
27,28 |
14 |
|
||||
|
5,6 |
|
3 |
11,12 |
|
6 |
17,18 |
|
9 |
|
|
23,24 |
12 |
29,30 |
0 |
|
||||
Триггер D Flip-Flop Simulink имеет один вход принудительной установки, причем в нулевое состояние. Это обстоятельство порождает две особенности в построении
38

счетчиков:
при необходимости принудительной установки i-го триггера в состояние 1 в качестве соответствующего выхода счетчика следует использовать инверсный выход триггера;
в асинхронном счетчике, отвечающем требованиям задания, соединять этот i-й триггер с последующим необходимо по схеме, соответствующей противоположному относительно заданному направлению счета.
Например, в суммирующем счетчике с Кс = 6 и Qн = 2 выходом среднего разряда счетчика будет инверсный выход соответствующего триггера при следующих межтриг-
герных связях: Q0 C1 и Q1 C2 или в обозначениях
Simulink !Q0 CLK1 и Q1 CLK2.
Другая особенность – MATLAB «отказывается» моделировать счетчики с произвольным модулем счета, поскольку длительность сигнала на выходе СУНС значительно меньше длинны такта. Выходом из этой ситуации является просто наблюдение сигнала на выходе СУНС без соединения его с входами R(!CLR) триггеров.
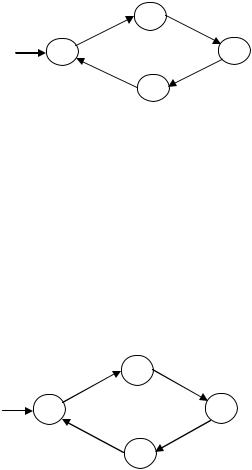
Так, модель счетчика примера, учитывающая все отмеченные особенности, приведена на рис. 15.
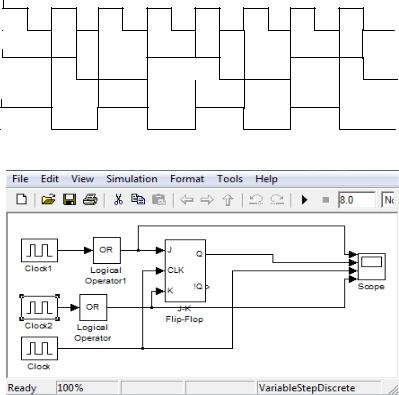
На рис. 16 приведены временные диаграммы работы счетчика, полученные в результате моделирования. Видно, что активный сигнал на выходе СУНС (логический элемент OR модели) образуется сразу по окончании рабочего цикла счетчика (Qк = 2+6-1 = 7 или 111 в двоичной системе счисления). Следовательно, реализация счетчика удовлетворяет всем требованиям.
Q0
!Q1
39
Q2
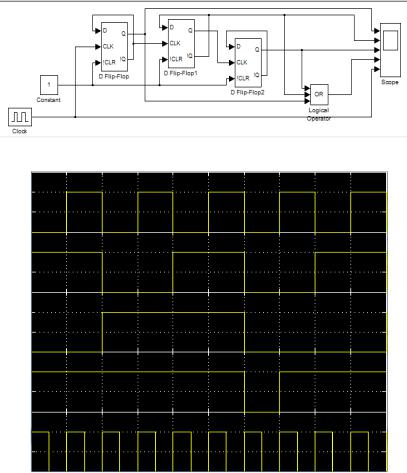
Рис. 15. Модель суммирующего счетчика с Кс = 6 и Qн = 2
Рис. 16. Результаты моделирования счетчика примера
2. Построить временные диаграммы работы счетчика.
3. В системе MATLAB создать модель разработанного счетчика и сохранить ее под именем ac<№ вар.>.mdl.
4.Запустить модель на исполнение и сравнить диаграммы окна Scope с диаграммами п.2 данной работы.
5.Разработать структурную схему 5-разрядного по- следовательно-параллельного регистра сдвига влево для четных N и вправо для нечетных N на базовых триггерах.
40