

ДИФУР ГУРЕВИЧ ЛЕКЦИИ
.pdfЗамечание. Если 2 = 1, то фазовыми траекториями являются
1
ветви гипербол и полуоси.
В общем случае, когда векторы V1 è V2 не ортогональны, качественное
поведение фазовых траекторий изображено на рис. 8.6. Определение. Особая точка в рассмотренном случае называется
седлом.
8.4.Фокус
Предположим, что 1 = + i ; 2 = i ; > 0; > 0 (случай< 0 рассматривается аналогично и дает то же поведение фазовых
траекторий).
Пусть комплексный вектор V = V1 + iV2 является собственным век- тором матрицы A, соответствующим собственному значению 1. Тогда вектор V = V1 iV2 будет собственным вектором, соответсòâующим собственному значению 2. Из линейной независимости V и V следует линейная независимость вещественных векторов V1 è V2.
Согласно теории линейных систем дифференциальных уравнений (см. теорему 6.7) любое ненулевое решение системы (8.6) имеет вид
Y (t) = c1Re(e 1tV ) + c2Im(e 1tV ):
Отсюда, вычисляя указанные действительные и мнимые части, получа- ем, что
Y (t) = e t(c1 cos t + c2 sin t)V1 + e t( c1 sin t + c2 cos t)V2; (8.11)
ãäå c1, c2 некоторые числа, c21 + c22 6= 0:
Предположим сначала, что векторы V1 è V2 образуют ортонорми- рованный базис. Перейдем в плоскости x0y к прямоугольной системе
координат v10v2, оси которой направлены вдоль V1 è V2 (ñì. ðèñ. 8.1). Соотошения (8.11) в координатной форме примут вид
v2(t) |
= |
( c1 sin t + c2 cos t)e t: |
v1(t) |
= |
(c1 cos t + c2 sin t)e t; |
Эти уравнения можно записать в виде
|
|
|
|
v2 |
(t) = (t) sin '(t); |
|
|
|
|
(8.12) |
|||||
|
|
|
|
v1(t) = (t) cos '(t); |
|
|
|
|
|
|
|
|
|||
t 2 R: |
|
|
|
и ' как полярные координаты, легко |
p |
|
|
|
|||||||
|
|
t |
, '(t) = '0 |
c1 |
|
c2 |
|
2 |
2 |
|
|||||
ãäå (t) = ce |
|
t, cos '0 = |
|
, sin '0 |
= |
|
|
c = c1 |
+ c2, |
||||||
|
c |
c , |
|||||||||||||
|
Рассматривая |
|
|
|
|
|
|
|
|
видеть, что |
|||||
151

Ðèñ. 8.7 |
Ðèñ. 8.8 |
|
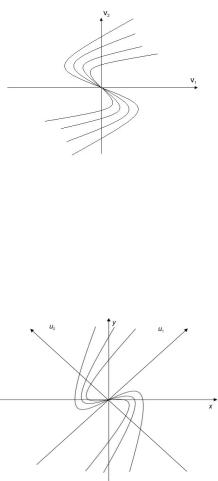
уравнения (8.12) параметрические уравнения логарифмической спирали с центром в начале координат. Следовательно, фазовые траектории имеют вид, изображенный на рис. 8.7.
В общем случае, когда векторы V1 è V2 не образуют ортонормирован-
ный базис, качественное поведение фазовых траекторий представлено на рис. 8.8.
Определение. Особая точка в рассмотренном случае называется фокусом.
8.5.Центр
Предположим, что корнями уравнения (8.7) являются 1 = i ; 2 = = i ; > 0:
Рассуждая так же, как в предыдущем разделе 8.4, снова приходим к уравнениям (8.12), которые при = 0 определяют окружность с цен-
тром в начале координат. Следовательно, качественное поведение фазовых кривых в общем случае имеет вид, показанный на рис. 8.9.
Ðèñ. 8.9
Определение. Особая точка в рассмотренном случае называется центром.
152
8.6.Дикритический узел
Пусть кратный корень уравнения (8.7), которому соответствуют
два линейно независимых собственных вектора V1 è V2. Любой вектор V 2 R2 представим в виде V = 1V1 + 2V2. Отсюда следует, что AV =
= V или (A E)V = 0 (E единичная матрица). Это возможно тогда и только тогда, когда A E = 0, т.е.
A = |
|
0 |
: |
|
0 |
|
|||
|
|
Другими словами, c = b = и a = d = 0. Уравнение (8.2) в этом случае имеет вид
а его решением будет y = cx, c произвольная константа. Интеграль-
ными кривыми являются лучи, выходящие из начала координат (рис. 8.10).
Ðèñ. 8.10
Определение. Особая точка в рассмотренном случае называется дикритическим узлом.
8.7.Вырожденный узел
Рассмотрим последний из возможных случаев. Пусть единственное собственное значение матрицы A и ему соответствует нормирован- ный собственный вектор V1, причем все остальные собственные векторы линейно зависимы с V1.
Теорема 8.2. Существует вектор V2, линейно независимый с V1, òà-
êîé ÷òî |
|
|
|
AV2 = V2 + V1: |
(8.13) |
||
Доказательство. Не уменьшая общности, можно считать, что |
|||
V1 = |
0 |
|
|
|
1 |
|
|
153
(этого всегда можно добиться, перейдя к новой системе координат, одним из базисных векторов которой является V1). В этом случае равенство AV1 = V1 перейдет в равенство
=:
a 0
Следовательно,
A = |
|
d |
: |
|
0 |
b |
|||
|
|
Собственными значениями этой матрицы являются и b. В силу единственности собственного значения b = . Кроме того, d 6= 0, т.к. в противном случае у A было бы два линейно независимых собственных вектора:
1 |
|
0 |
|
|
|
|
0 |
è |
1 . |
и распишем уравнение (8.13) в координатной |
|||
|
|
x1 |
||||
Обозначим V2 = x2 |
||||||
форме: |
|
|
|
|
|
|
|
|
|
x |
1 |
+ dx2 |
= x1 + 1; |
|
|
|
x2 |
= x2: |
||
Отсюда следует, что в качестве V2 можно взять вектор
0
V2 = 1 :
d
Теорема доказана. Теорема 8.3. Вектор-функции
Y1(t) = etV1; Y2(t) = et(tV1 + V2)
образуют фундаментальную систему решений уравнения (8.6). Доказательство. Непосредственная проверка показывает, что
Y1(t); Y2(t) решения (8.6). Их линейная независимость следует из того, что при t = 0 определитель Вронского
jY1(0) Y2(0)j = jV1 V2j =6 0:
Теорема доказана.
Из теоремы 8.3 следует, что любое ненулевое решение системы (8.6) имеет вид
Y (t) = (c1 + c2t)etV1 + c2etV2; |
(8.14) |
ãäå c1; c2 некоторые числа, c21 + c22 6= 0.
154
Предположим сначала, что векторы V1 è V2 образуют ортонорми- рованный базис. Перейдем в плоскости x0y к прямоугольной системе
координат v10v2, оси которой направлены вдоль V1 è V2 Соотношения (8.14) в координатной форме примут вид
v2(t) |
= |
c2et; 2 |
t 2 R: |
v1(t) |
= |
(c1 + c |
t)et; |
Åñëè c2 = 0, à c1 > 0, то фазовой траекторией будет положительная часть оси v1. Åñëè c2 = 0, à c1 < 0, то фазовая траектория отрицательная часть оси v1.
Пусть теперь c2 > 0. Предположим также, что c1 0; > 0 (другие случаи рассматриваются аналогично). Когда t меняется от 0 до 1, v1(t) возрастает от c1 äî 1, à v2(t) возрастает от c2 до 1. При t, меняющихся
îò 0 äî 1,1 v2(t) |
убывает от |
|
äî |
. Легко показать, что при |
t 2 |
, |
|||
|
c2 |
c2 |
|
0 |
[t0; 0] |
||||
ãäå t0 = |
|
(c1 + |
), v1(t) возрастает от v1(t0), которое меньше 0, до |
||||||
c2 |
|||||||||
c1, à ïðè t 2 ( 1; t0] v1(t) возрастает от v1(t0) до 0. Из этих элемен-
тарных рассуждений заключаем, что фазовые траектории имеют вид, показанный на рис. 8.11.
Ðèñ. 8.11
В общем случае, когда V1 è V2 не образуют ортонормированного ба-
зиса, качественное поведение фазовых траекторий представлено на рис. 8.12.
Ðèñ. 8.12
Особая точка в рассмотренном случае называется вырожденным узлом.
155

9.Уравнения в частных производных
первого порядка
Теория уравнений в частных производных первого порядка тесно связана с теорией систем обыкновенных дифференциальных уравнений. Изложим вначале необходимые сведения, касающиеся систем обыкновенных дифференциальных уравнений. Рассмотрим нормальную систему
yk0 = fk(x; y1; : : : ; yn); k = 1; : : : ; n; |
(9.1) |
где функции f1; : : : ; fn определены в некоторой области D Rn+1.
9.1.Сведение системы уравнений
êодному уравнению высшего порядка
Один из методов решения системы состоит в следующем. Предположим, что функции y1(x); : : : ; yn(x) образуют решение системы (9.1) на интервале (a; b) и функции f1; : : : ; fn имеют непрерывные частные производные до (n 1)-го порядка включительно. Продифференцируем первое
из тождеств
yk0 fk(x; y1(x); : : : ; yn(x)); k = 1; : : : ; n;
последовательно n 1 раз по x, в результате получим тождества
y1(m) 'm(x; y1(x); : : : ; yn(x)); m = 1; : : : ; n;
ãäå ' |
1 |
= f , ' |
m |
= |
@'m 1 |
+ |
n |
@'m 1 |
f , m = 2; : : : ; n. Отсюда заклю- |
||||||
|
|||||||||||||||
|
1 |
|
|
|
|
@x |
k=1 |
|
k |
|
|
||||
|
|
|
|
|
|
|
|
@yk |
|
|
|||||
чаем, что функции y1(x); : :P: ; yn(x) являются решениями системы |
|
||||||||||||||
|
|
|
|
|
y1(m) = 'm(x; y1; : : : ; yn); |
m = 1; : : : ; n: |
(9.2) |
||||||||
Рассмотрим первые n 1 уравнения системы (9.2) и предположим, |
|||||||||||||||
что их можно однозначно разрешить относительно y2; : : : ; yn, ò. å. |
|
||||||||||||||
|
|
|
y |
k |
= |
k |
(x; y |
; y0 ; : : : ; y(n 1)); |
k = 2; : : : ; n: |
(9.3) |
|||||
|
|
|
|
|
|
|
1 |
1 |
1 |
|
|
|
|||
Подставив эти соотношения в правую часть последнего уравнения системы (9.2), получим уравнение
y(n) |
= f(x; y |
; y0 |
; : : : ; y |
(n 1)); |
(9.4) |
1 |
1 |
1 |
|
1 |
|
ãäå f = 'n(x; y1; 2; : : : ; |
n). Таким образом, если y1(x); : : : ; yn(x) ðå- |
||||
шения системы (9.1), то y1(x) решение уравнения (9.4). Обратно, если
156
y1(x) решение уравнения (9.4), то, определяя функции y2(x); : : : ; yn(x) по формулам (9.3), можно показать, что функции y1(x); : : : ; yn(x) îáðà-
зуют решение системы (9.1), и, следовательно, система (9.1) равносильна уравнению (9.4). А это означает, что решение системы (9.1) сводится к решению (9.4).
Замечание 1. Если формулы (9.3) получить невозможно, то в ка-
честве исходного тождества в этих рассуждениях можно взять какоенибудь другое, например, y20 f2(x; y1(x); : : : ; yn(x)).
Замечание 2. Существование соотношений (9.3) устанавливается с помощью следующей теоремы о неявных функциях.
Теорема 9.1. Пусть T = (t1; t2; : : : ; tm), Y = (y1; y2; : : : ; yn),
F (T; Y ) = (F1; F2; : : : ; Fn), функции Fi(T; Y ) (i = 1; : : : ; n) определены и непрерывны в области G Rm+n вместе с частными производны-
ìè |
@Fi |
, i; j = 1; : : : ; n. Предположим, далее, что в точке (T0; Y0) 2 G |
||||
@yj |
||||||
F (T0; Y0) = 0 è |
|
|
n |
|
||
|
|
|
T ; Y |
) |
|
|
|
|
det |
@Fi( 0 0 |
|
i;j=1 |
6= 0: |
|
|
@yj |
|
|||
Тогда уравнение F (T; Y ) = 0 определяет однозначную неявную векторфункцию Y = (T ), определенную и непрерывную вместе с частными производными первого порядка в некоторой окрестности точки T0, причем (T0) = Y0.
9.2. Решение системы обыкновенных дифференциальных уравнений
с помощью первых интегралов
Определение 9.1. Функция (x; y1; : : : ; yn) называется первым интегралом (или просто интегралом) системы (9.1), если:
1) функция не равна тождественно постоянной;
2) в области D функция непрерывна вместе с частными производ-
ными по всем переменным;
3) вдоль любого решения y1(x); : : : ; yn(x) системы (9.1) функция принимает постоянное значение, т. е.
(x; y1(x); : : : ; yn(x)) const:
Иногда первым интегралом называют не функцию (x; y1; : : : ; yn), а соотношение
(x; y1; : : : ; yn) = c;
где c константа.
157

Пример 9.1. Вращение твердого тела вокруг неподвижной точки описывается следующей системой дифференциальных уравнений:
y_1 = |
B C |
y2y3; |
|
|
A |
|
|||
y_2 |
= |
C A |
y1y3; |
(9.5) |
B |
||||
y_3 |
= |
A B |
y1y2; |
|
|
|
C |
|
|
ãäå y1(t); y2(t); y3(t) составляющие вектора угловой скорости в момент времени t; A, B, C известные положительные числа. Умножая эти уравнения соответственно на Ay1, By2, Cy3
Ay1y_1 + By2y_2 + Cy3y_3 = 0;
èëè
dtd (Ay12 + By22 + Cy32) = 0:
Следовательно, функция
1(y1; y2; y3) = Ay12 + By22 + Cy32
является первым интегралом системы (9.5). Если уравнения (9.5) умножить соответственно на A2y1; B2y2; C2y3 и сложить, то получим ещ¼ один
первый интеграл:
2(y1; y2; y3) = A2y12 + B2y22 + C2y32:
Если известен первый интеграл (x; y1; : : : ; yn) системы (9.1), то е¼ порядок можно понизить. В самом деле, предположим, что соотношение
(x; y1; : : : ; yn) = c
неявно определяет функцию
yn = '(x; y1; : : : ; yn 1):
Подставляя эту функцию в первые n 1 уравнения системы (9.1), мы получим систему относительно y1; : : : ; yn 1.
В примере (9.1) были найдены два первых интеграла 1(y1; y2; y3)
è2(y1; y2; y3). Если предположить, что A > B, то из соотношений
Ay12 + By22 + Cy32 = c1;
158
A2y12 + B2y22 + C2y32 = c2
можно,предполагая, например, y1 è y2 неотрицательными, выразить y1 è y2 как функции, зависящие от y3, c1 è c2. Подставив эти функции в третье уравнение системы (9.5), получим дифференциальное уравнение первого порядка относительно y3. Если же в этом примере A = B = C, то второй интеграл 2(y1; y2; y3) не будет содержать новой информации.
В связи с этим введем следующее определение.
Определение 9.2. Первые интегралы f i(x; y1; : : : ; yn)gmi=1 (m n)
системы (9.1) называются независимыми, если в области D матрица
@ i |
|
|
|
|
@yj |
i=1;:::;m; j=1;:::;n |
|
имеет ранг m: |
|
|
|
При наличии m независимых первых интегралов 1; : : : ; |
m èç ñîîò- |
||
ношений |
|
|
|
i(x; y1; : : : ; yn) = ci; i = 1; : : : ; m; |
(9.6) |
||
можно выразить m функций через оставшиеся n m функций и кон-
станты c1; : : : ; cm и свести систему (9.1) к дифференциальной системе из n m уравнений.
Рассмотрим подробно случай m = n. Выберем произвольную точку
(x0; y10; : : : ; yn0) 2 D и обозначим |
|
ci0 = i(x0; y10; : : : ; yn0); |
i = 1; : : : ; n: |
Применим к системе (9.6) теорему 9.1, |
положив T = (x; c1; : : : ; cn), |
Y = (y1; : : : ; yn), T0 = (x0; c01; : : : ; c0n), Y0 = (y10; : : : ; yn0), Fi = i ci, i = 1; : : : ; n. Согласно этой теореме, система (9.6) определяет неявно
однозначные непрерывно дифференцируемые функции
yi = 'i(x; ci; : : : ; cn); |
i = 1; : : : ; n; |
(9.7) |
|
определенные в области S, где |
0 |
0 |
|
|
некоторая окрестность точки |
||
x0, S некоторая окрестность вектора (c1; : : : ; cn). По построению выполняются тождества
i(x; '1(x; c1; : : : ; cn); : : : ; 'n(x; c1; : : : ; cn)) ci; i = 1; : : : ; n:
Предположим, что через каждую точку некоторой окрестности точки (x0; y10; : : : ; yn0) проходит единственная интегральная кривая (т. е. график
решения) системы (9.1). По определению первых интегралов функции i; : : : ; n вдоль этих кривых принимают постоянные значения. В силу
159
единственности неявных функций (9.7) при достаточно малых и S ин-
тегральные кривые совпадают с кривыми, определяемыми уравнениями (9.7).
Таким образом, формулы (9.7) определяют решения системы (9.1), причем при надлежащем выборе констант c1; : : : ; cn можно получить
любое решение, график которого лежит в некоторой окрестности точ- ки (x0; y10; : : : ; yn0).
Определение 9.3. Система n независимых первых интегралов си-
стемы (9.1) называется общим интегралом системы (9.1).
Заметим, что знание общего интеграла системы (9.1) позволяет получить все е¼ решения в неявном виде (9.6).
Теорема 9.2 (о существовании общего интеграла). Пусть функции f1; : : : ; fn в системе (9.1) непрерывно дифференцируемы в окрестности точки (x0; y10; : : : ; yn0). Тогда у системы (9.1) существует общий интеграл, определенный в некоторой окрестности этой точки.
Доказательство. По теореме о дифференцируемости решения зада- чи Коши по начальным данным существуют непрерывно дифференцируемые функции 'i(x1; x2; : : : ; xn+2), i = 1; : : : ; n, определенные в области
S ( , S некоторые окрестности точек x0 è (y10; : : : ; yn0 ) соответственно), такие что формулы
yi(x) = 'i(x; c0; c1; : : : ; cn); i = 1; : : : ; n;
определяют на интервале решение задачи Коши для системы (9.1), удовлетворяющее начальным условиям
yi(c0) = ci; i = 1; : : : ; n;
для любой точки (c0; c1; : : : ; cn) 2 S. Определим функции
i(x; y1; : : : ; yn) = 'i(x0; x; y1; : : : ; yn); i = 1; : : : ; n:
Очевидно, функции i непрерывно дифференцируемы в окрестности точки (x0; y10; : : : ; yn0). Из определения функций 'i следует, что вдоль лю- бого решения '~1(x); : : : ; '~n(x) системы (9.1), график которого лежит в области S, выполняются тождества
i(x; '~1(x); : : : ; '~n(x)) '~i(x0); i = 1; : : : ; n:
Следовательно, функции i(x; y1; : : : ; yn), i = 1; : : : ; n, образуют систему
первых интегралов в окрестности точки |
(x0; y10; : : : ; yn0). Докажем, что |
они независимы. Из определения 'i имеем тождества |
|
i(x0; y1; : : : ; yn) yi; |
i = 1; : : : ; n; |
160