

Laboratornaya_2
.pdf11
|
U |
N0 |
|
|
|
|
( Z ) |
1 |
ln |
|
. |
(2) |
|
|
|
0 |
U |
2 |
|
|
|
2 |
Из этого выражения следует, что оптимальный приемник различения сигналов U1 и U2 должен вычислять корреляционные интегралы по принятой реализации y(t) длительностью tэ, образовывать их разность и результат сравнивать с порогом различения
Z |
|
N0 |
ln |
|
(3) |
|
0 |
2 |
0 |
||||
|
|
|
||||
|
|
|
|
|
для принятия решения о том, какой из возможных сигналов U1(t) или U2(t) содержится в принятой реализации y(t).
Значения корреляционных интегралов являются случайными величинами, так как содержат шумовой компонент Uш(t), входящий в состав реализации y(t). Линейность операций над y(t) для получения корреляционных интегралов (1) позволяет считать, что их значения имеют гауссовскую плотность вероятностей, то есть такую же, что и
Uш(t), |
характеризуемую |
двумя параметрами |
– |
дисперсией |
|
2 и |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z |
|
средними |
значениями Z1 и Z 2 . |
Причем, при |
равенстве |
энергий |
|||||||||||||||
Е1=Е2=Е |
элементарных |
сигналов |
U1(t) и |
U2(t) |
дисперсии |
2 |
|||||||||||||
|
|
Z |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
распределения Z1 и Z2 |
будут одинаковыми |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
2 |
|
2 |
|
2 |
|
N0 E |
, |
|
|
|
|
|
|
|
|
|
|
|
|
Z1 |
Z2 |
Z |
2 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где N0 – спектральная плотность мощности шума в полосе пропускания |
|||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||
приемника. Средние же значения |
корреляционных |
интегралов |
Z1 и |
||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||
Z 2 будут |
зависеть |
от |
сигнальной |
составляющей принимаемой |
|||||||||||||||
реализации y(t). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
Так, если на вход различителя |
поступает |
сигнал |
U1(t), то |
|||||||||||||
y(t)=Uш(t)+U1(t) и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
tэ |
tэ |
|
|
|
|
|
tэ |
|
|
tэ |
|
|
|
|
|
|
Z1 |
у(t)U1 (t)dt |
U ш (t)U1 (t)dt |
|
U12 (t)dt |
U ш (t)U1 (t)dt Е; |
||||||||||||||
|
|
|
0 |
0 |
|
|
|
|
|
0 |
|
|
0 |
|
|
|
|
|
|
|
|
|
tэ |
tэ |
|
|
|
|
tэ |
|
|
|
tэ |
|
|
|
|
|
|
|
Z2 |
у(t)U2 (t)dt Uш (t)U2 (t)dt |
U1 (t)U2 (t)dt Uш (t)U2 (t)dt |
Е. |
|||||||||||||||
|
|
|
0 |
0 |
|
|
0 |
|
|
|
0 |
|
|
|
|
|
|
||
|
|
|
Если же в составе y(t) содержится сигнал U2(t), то |
|
|
|
|
||||||||||||
12
tэ |
tэ |
tэ |
tэ |
Z1 у(t)U1 (t)dt U ш (t)U1 (t)dt |
U 2 (t)U1 (t)dt U ш (t)U1 (t)dt Е; |
||
0 |
0 |
0 |
0 |
tэ |
tэ |
tэ |
tэ |
Z 2 |
у(t)U 2 (t)dt U ш (t)U 2 (t)dt |
U 22 (t) U ш (t)U1 (t)dt Е, |
|
0 |
0 |
0 |
0 |
где ρ - коэффициент взаимной корреляции элементарных сигналов U1(t)
и U2(t).
Из приведенных выражений видно, что средние значения Z1 и
Z 2 могут быть равными – либо Е, либо ρЕ, в зависимости от сигнала,
содержащегося в реализации y(t).
В соответствии с этим статистика Z=Z1–Z2, как разность случайных величин, подчиняющихся нормальному закону распределения также описывается нормальным законом распределения
со средним значением Z Z1 Z 2 , зависящим от сигнала, содержащегося в составе y(t) и дисперсией
|
|
|
|
|
|
|
|
N0 E(1 |
) |
. |
|
|
|
|
|
|
|
|
|
Z |
2 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
В таблице 1 приведена эта взаимосвязь. |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Таблица 1 |
|
Сигнал в составе y(t) |
|
U1(t) |
|
|
U2(t) |
|
||||||
|
|
|
|
|
|
|
|
Е |
|
|
ρЕ |
|
Z |
1 |
|
|
|
||||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
ρЕ |
|
|
Е |
|
Z |
2 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
Е(1-ρ) |
|
|
-Е(1-ρ) |
|
|
|
Z |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|||||
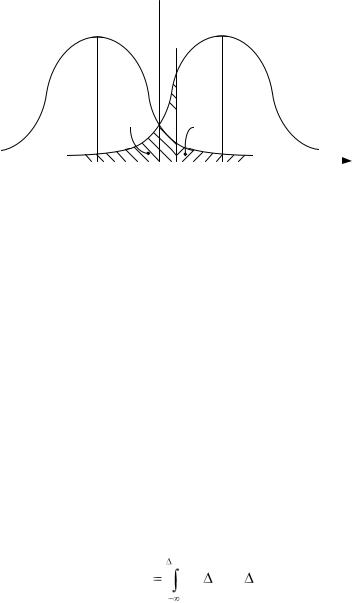
На рис. 2 изображены плотности вероятностей Z (разности корреляционных интегралов) в зависимости от сигнала, принимаемого в составе y(t).
13
 W( z)
W( z)
W2( z) |
W1( z) |
P12  P21
P21
-E(1-ρ) |
0 z0 Е(1-ρ) |
z |
Рис. 2. Условные плотности вероятностей разности корреляционных интегралов
Оптимальный порог принятия решения (3) определяется значением порога различения Λ0 по отношению правдоподобия, который зависит от принятого критерия различения, базирующегося на понятии «среднего риска».
Средний риск - это количественное значение ущерба, наносимого неизбежными ошибочными решениями при различении сигналов U1(t) и U2(t). Средний риск зависит от априорных вероятностей появления в составе y(t) различаемых сигналов Р(U1) и Р(U2) и алгоритма приема. Очевидно, что в задачах различения предполагается, что в составе y(t) всегда есть один из возможных сигналов, то есть при этом
Р(U1)+Р(U2)=1. |
(4) |
Потери (ущерб), связанные с ошибочными решениями, принято обозначать r12 и r21, – соответственно потери вследствие ошибочного приѐма U1(t) и U2(t).
Располагая знаниями априорных вероятностей (4) и названных потерь, можно записать выражение среднего риска как функцию этих значений и соответствующих условных вероятностей ошибочных решений Р12 и Р21 ,где
|
Z0 |
Р12 |
W1 ( Z )d ( Z ) ; |
14
Р21 |
W2 ( Z )d ( Z ) . |
|
||
|
Z0 |
|
|
|
Теперь функция среднего риска R( Z0) приобретает |
||||
следующий вид |
|
|
|
|
R( Z0 ) P12 r12 |
P(U1 ) P21 |
r21 |
P(U 2 ) . |
(5) |
Здесь произведения |
P12 P(U1 ) и |
P21 |
P(U 2 ) |
являются |
безусловными (полными) вероятностями ошибок различения − принято решение о приѐме U2(t) по реализации y(t), содержащей U1(t), и наоборот.
В выражении (5) для функции среднего риска от порога
различения Z0 |
зависят только Р12 и Р21. При этом с увеличением Z0 |
Р12 возрастает, |
а Р21 убывает. Одновременно возрастает средняя плата |
за ошибку, выражаемую первым слагаемым функции среднего риска, и уменьшается плата за ошибку, выражаемую вторым слагаемым. Это свидетельствует о том, что существует такое значение Z0, при котором средний риск минимален. Это значение называют оптимальным порогом различения. Он может быть найден путем приравнивания к нулю производной R( Z0) по Z0
|
|
|
|
|
dR( |
Z0 ) |
0 ; |
|
|
|||
|
|
|
|
|
d ( |
Z |
0 ) |
|
|
|||
|
|
|
|
|
|
|
|
|
||||
d |
|
|
Z0 |
|
|
|
|
|
|
|||
|
r12 |
P(U1 ) W1 ( Z )d ( Z ) r21 P(U 2 ) W2 ( Z )d ( Z ) |
0 ; |
|||||||||
|
|
|||||||||||
dZ |
0 |
|||||||||||
|
|
|
|
|
|
|
Z |
|
||||
|
|
|
r21 P(U1 )W1 ( Z0 ) r21 P(U 2 )W2 ( Z0 ) 0 ; |
|
||||||||
|
|
|
|
W1 ( Z0 ) |
|
|
r21 P(U 2 ) |
|
||||
|
|
|
|
|
|
|
|
. |
(6) |
|||
|
|
|
W2 ( Z0 ) |
|
r12 P(U 2 ) |
|||||||
Левая часть полученного неравенства как функция Z0 называется отношением правдоподобия Λ, которое при оптимальном значении Z0 становится равным правой части равенства, которую, в свою очередь, называют пороговым значением отношения правдоподобия
|
r21 P(U 2 ) |
, |
(7) |
|
0 |
r12 P(U1 ) |
|||
|
|
|||
|
|
|

15
входящим в выражение (2).
Теперь пороговое испытание разности корреляционных интегралов можно записать в виде
U |
|
N0 |
|
r21 P(U 2 ) |
|
|
Z |
1 |
ln |
. |
(8) |
||
|
|
|
||||
U |
|
2 |
|
r12 P(U1 ) |
|
|
|
2 |
|
|
|
|
|
Критерий различения сигналов, основанный на использовании порога различения (7) называется критерием Байеса. Он требует
знания r12, r21, Р(U2) и Р(U1).
При отсутствии обоснованных соображений по определению значений r12 и r21 их принимают равными
r12=r21=1.
При этом функция среднего риска
R( Z0 ) P12  P(U1 ) P21
P(U1 ) P21  P(U 2 ) min
P(U 2 ) min
численно равна полной вероятности ошибочных решений. То есть минимизируется полная вероятность ошибок.
Этот критерий называется критерием «идеального
наблюдателя».
Если при равенстве r12 и r21 принять равным Р(U1) и Р(U2)
Р(U1)= Р(U2) = 0,5,
то порог
Λ0 = 1,
а функция среднего риска при таком пороге численно равна половине условной вероятности ошибочных решений
R( Z0)=0,5(Р12+Р21)=min.
Этот критерий называется критерием «максимального правдоподобия». При этом критерии различения минимизируется условная вероятность ошибок.
В системах дискретной связи, когда непрерывные сигналы превращаются в ИКМ-сигналы (ИКМ – импульсно-кодовая модуляция), на приемную сторону поступает последовательность нулевых и единичных символов. В этом потоке средняя частота

16
повторения единичных и нулевых символов одинакова. Поэтому у цифровых систем связи объективно Р(U1)=Р(U2).
Кроме этого ошибочный прием «0» вместо «1» и наоборот одинаково вредны. Поэтому также объективно можно полагать
r12=r21=1.
Таким образом, в системах цифровой (дискретной) связи с использованием двухпозиционных сигналов объективно целесообразно использовать критерий различения «максимального правдоподобия» с порогом Λ0 = 1.
Поэтому, на основании (8) оптимальным порогом различения по статистике Z0 следует считать
Z |
|
|
N0 |
ln |
r21 P(U 2 ) |
|
0 . |
(9) |
|
0 |
2 |
r12 P(U1 ) |
|||||||
|
|
|
|
||||||
|
|
|
|
|
|||||
Итак, для оптимального различения сигналов в приемнике на |
|||||||||
основе принятой реализации у(t) должны формироваться |
|||||||||
корреляционные интегралы (1), образовываться их разность |
Z и эта |
||||||||
разность сравниваться с |
порогом |
принятия |
решения Z0 |
(9). Если |
|||||
Z> Z0, принимается решение о приеме сигнала U1(t) (и соответствующего элементарного сообщения «1»). В противном случае принимается решение о приеме сигнала U2(t) (и соответствующего элементарного сообщения «0»).
Принимаемые решения могут быть ошибочным. При этом
вероятности ошибок Р12 и Р21 |
|
при распознавании принятых сигналов |
|||||||||||||||||||
(сообщений) могут быть определены выражениями |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Р12 |
W1 ( Z )d ( Z ); |
|
|
|
|
||||||||||||
|
|
|
|
P21 |
|
|
W2 ( Z )d ( Z ), |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W ( |
Z ) |
|
|
|
|
1 |
|
|
|
exp |
[ |
Z |
E(1 |
)] |
; |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
1 |
|
2 |
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
||||
|
|
|
|
Z |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z |
|
|
|
|
W2 |
( |
Z ) |
|
|
|
1 |
|
|
exp |
[ |
Z |
E(1 |
)]2 |
. |
|||||||
|
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|||||||||
|
|
|
|
|
|
|
|
||||||||||||||
|
|
2 |
|
|
Z |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z |
|
|
|
|
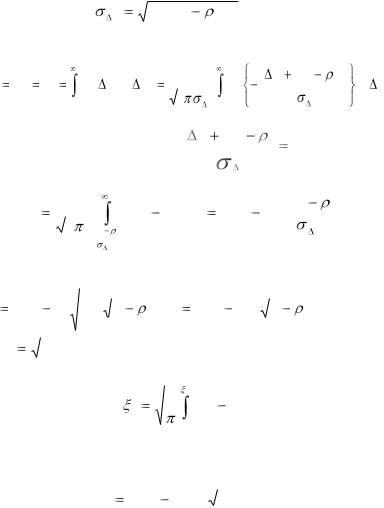
В этих выражениях среднеквадратические значения Z одинаковы и равны
17
|
Z |
N0 E(1 |
) / 2 |
|
|
|
(10) |
|||||
Поэтому при нулевом значении порога различения |
Z0 условные |
|||||||||||
вероятности ошибок будут одинаковыми (см. рис. 2). |
|
|
|
|
||||||||
Р12 P21 P0 |
W2 ( Z )d ( |
Z ) |
|
1 |
|
exp |
[ Z |
E(1 |
)]2 |
d( Z ). |
||
|
|
|
|
|
2 |
2 |
|
|||||
2 |
|
|
||||||||||
|
0 |
|
|
|
Z 0 |
|
|
|
||||
|
|
|
|
|
|
|
Z |
|
|
|||
Выполняя замену переменной |
Z E(1 |
) |
x , получаем |
|
|
||
Z |
|
||
|
|
|
P |
1 |
|
|
|
|
|
|
|
|
|
exp( |
|
x2 |
)dx 0,5[1 |
Ф( |
Е(1 |
) |
)]. |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
0 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
E (1 ) |
|
|
|
|
|
|
|
|
|
|
Z |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Подставляя в это выражение σ Z из (10), получаем |
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
2E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
P 0,5[1 |
Ф( |
(1 |
|
) / 2)] |
0,5[1 |
Ф(q |
(1 |
) / 2)], (11) |
|||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||
0 |
|
|
|
|
N0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||
где q |
2E / N 0 |
- отношение сигнал/шум по напряжению, а Ф(ξ) – |
|||||||||||||||||||||||||||
функция Крампа, определяемая выражением |
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t 2 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
Ф( |
) |
|
|
|
|
|
|
exp( |
|
)dt. |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У ортогональных сигналов U1(t) и U2(t), которыми могут быть радиосигналы с разными частотами (частотная манипуляция) ρ=0, а вероятность ошибочного приема двоичного символа
|
|
|
|
P0 0,5[1 Ф(q / 2)]. |
(12) |
||
При двоичной фазовой манипуляции элементарные сигналы U1(t) и U2(t) имеют одинаковые частоты, но разные начальные фазы. Фаза одного из них по отношению к фазе несущего колебания равна 0, а фаза другого – «π». Такие сигналы называются противоположными. Они характеризуются коэффициентом взаимной корреляции ρ=-1. Для них
Р0 = 0,5[1-Ф(q)]. |
(13) |
|
|
|
|
18 |
|
|
|
|
|
4.2. Оптимальный корреляционный приемник двоичных |
|||||||
|
фазоманипулированных радиосигналов |
|
|
|||||
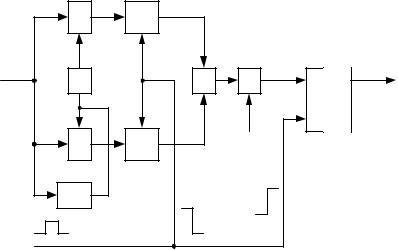
Функциональная схема корреляционного приемника изображена |
||||||||
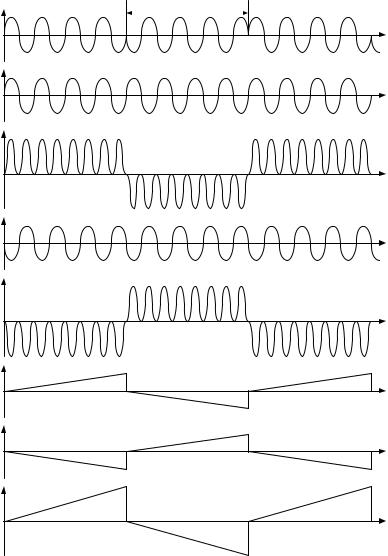
на рис. 3, а временные диаграммы напряжений, характеризующие |
||||||||
взаимодействие ее узлов, приведены на рис. 4а и 4б. |
|
|
|
|||||
|
Х |
|
T |
7 |
|
|
|
|
|
5 |
0∫ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y(t) 1 |
4 |
|
|
- 8 |
ПУ 9 |
|
|
Q |
π |
|
|
D |
T |
||||
|
|
2 |
|
|
|
|
|
11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
C |
|
|
|
|
|
T |
|
|
|
|
|
|
Х |
3 |
0∫ |
|
Uпор |
|
|
|
|
фон |
|
|
Сброс |
|
|
|
|
|
|
|
|
10 |
Запись |
|
|
|
Рис. 3. Функциональная схема корреляционного приемника двоичных |
||||||||
|
|
|
|
ФМ-сигналов |
|
|
|
|
Функциональная схема приемника, кроме умножителей, |
||||||||
интеграторов и вычитателей, содержит пороговое устройство (ПУ), D- |
||||||||
триггер и формирователь опорного напряжения (ФОН), |
||||||||
предназначенный для формирования опорного напряжения из |
||||||||
принимаемого сигнала. Это напряжение должно точно совпадать по |
||||||||
частоте с несущим гармоническим колебанием. Таким образом, |
||||||||
совместно с фазовращателем на π ФОН выполняет функцию генератора |
||||||||
копий элементарных сигналов U1(t) и U2(t). |
|
|
|
|||||
19
«1» |
«0» tэ |
«1» |
1
2
3
4
5
t
t
t
t
t
6 |
t |
|
7 |
t |
|
t
8
Рис.4а. Временные диаграммы в точках приемника ФМ-сигналов
20
|
|
|
|
|
|
|
|
9 |
а |
б |
в |
|
t |
||
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
||
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
||
|
|
|
|
|
|
||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
||
11 |
|
|
а |
|
б |
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.4б. Временные диаграммы в точках приемника ФМ-сигналов
Пороговое устройство выполняет роль решающего устройства с порогом принятия решения Uпор=0, а D-триггер фиксирует в логических уровнях результат принятия решения на элементарном интервале tэ, задаваемом последовательностью стробирующих импульсов, формируемых подсистемой тактовой синхронизации. Эти импульсы в моменты окончания каждого интервала интегрирования положительным перепадом напряжения записывают в D-триггер уровень напряжения на выходе ПУ, а отрицательным перепадом напряжения сбрасывают интеграторы в нулевое состояние.
На временных диаграммах рис. 4 не показано влияние шума на результат приѐма. Это позволяет наглядно судить о физических процессах, происходящих в узлах приѐмника.
Анализируя временные диаграммы на рис.4, нетрудно отметить, что для двоичных ФМ-сигналов корреляционный приемник может быть существенно упрощен по сравнению с канонической схемой, изображенной на рис.3, путем использования только одного канала обработки радиосигнала.
При этом схема одноканального приемника приобретает вид, изображенный на рис.5, где ПТС – приемник тактовой синхронизации.