

7.Specifications
.pdfChapter 7. Specifications
it follows that the condition SDsE e2s2 implies that LDsE s−2 for small s. This implies that there are two integrations in the loop. Continuing this reasoning we find that in order to have zero steady state error when tracking the signal
rDtE t2
2
it is necessary that sDsE e3s3 for small s. This implies that there are three integrals in the loop.
The coefficients of the Taylor series expansion of the sensitivity sDsE
function for small s, |
|
SDsE e0 e1s e2s2 . . . ensn . . . |
D7.8E |
are thus useful to express the steady state error in tracking low frequency signals. The coefficients ek are called error coefficients. The first non vanishing error coefficient is the one that is of most interest, this is often called the error coefficient.
7.5 Specifications Based on Optimization
The properties of the transfer functions can also be based on integral criteria. Let eDtE be the error caused by reference values or disturbances and let uDtE be the corresponding control signal. The following criteria are commonly used to express the performance of a control system.
Z [
I E eDtEdt
Z0[
I AE heDtEhdt
Z0[
IT AE theDtEhdt
Z0[
IQ e2DtEdt
Z0[
W Q De2DtE ρu2DtEEdt
0
They are called, IE integrated error, IAE integrated absolute error, ITAE integrated time multiplies absolute error, integrated quadratic error and WQ weighted quadratic error. The criterion WQ makes it possible to trade the error against the control effort required to reduce the error.
262

7.6 Properties of Simple Systems
7.6 Properties of Simple Systems
It is useful to have a good knowledge of properties of simple dynamical systems. In this section we have summarize such data for easy reference.
First Order Systems
Consider a system where the transfer function from reference to output |
||||
is |
a |
|
||
GDsE |
D7.9E |
|||
|
||||
s a |
|
|||
The step and impulse responses of the system are
hDtE 1 − e−at 1 − e−t/T nDnE ae−at T1 e−t/T
where the parameter T is the time constant of the system. Simple calculations give the properties of the step response shown in Table 7.1. The 2% settling time of the system is 4 time constants. The step and impulse responses are monotone. The velocity constant e1 is also equal to the time constant T. This means that there will be a constant tracking error of e1v v0T when the input signal is a ramp r v0t.
This system D7.9E can be interpreted as a feedback system with the
loop transfer function
LDsE as sT1
This system has a gain crossover frequency ω nc a. The Nyquist curve is the negative imaginary axis, which implies that the phase margin is 90'. Simple calculation gives the results shown in Table 7.1. The load disturbance response of a first order system typically has the form
s Gxd s a
The step response of this transfer function is
hxd e−at
The maximum thus occurs when the disturbance is applies and the settling time is 4T. The frequency response decays monotonically for increasing frequency. The largest value of the gain is a zero frequency.
Some characteristics of the disturbance response are given in Table 7.2.
263

Chapter 7. Specifications
Table 7.1 Properties of the response to reference values for the first order system
Gxr a/Ds aE.
Propety |
Value |
|
|
Rise time |
Tr 1/a T |
Delay time |
Td 0.69/a 0.69T |
Settling time D2%E |
Ts 4/a 4T |
Overshoot |
o 0 |
Error coefficients |
e0 0, e1 1/a T |
Bandwidth |
ω b a |
Resonance peak |
ω r 0 |
Sensitivities |
Ms Mt 1 |
Gain margin |
nm [ |
Phase margin |
ϕm 90' |
Crossover frequency |
ω nc a |
Sensitivity frequency |
ω sc [ |
Table 7.2 Properties of the response to disturbances for the first order system
Gxd s/Ds aE.
Property |
Value |
|
|
Peak time |
Tp 0 |
Max error |
emax 1 |
Settling time |
Ts 4T |
Error coefficient e1 T |
|
Largest norm |
hhGxdhh 1 |
Integrated error |
I E 1/a T |
Integrated absolute error |
I AE 1/a T |
Second Oder System without Zeros
Consider a second order system with the transfer function
ω 2
GDsE 0 D7.10E
s2 2ζ ω 0s ω 02
264

7.6 Properties of Simple Systems
The system has two poles, they are complex if ζ |
1 and real if ζ 1. |
||||||||||||||||||||
The step response of the system is |
|
|
|
|
|
|
|||||||||||||||
|
81 − |
e−ζ ω 0 t |
|
|
|
sinDω dt φE |
|
|
|
|
|
for hζ h 1 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
1 |
− |
ζ 2 |
|
|
|
|
|
|
|||||||||||
h t |
> |
|
1 |
|
|
t e |
ω 0 t |
|
|
|
|
|
|
|
|
forζ 1 |
|||||
>1 |
|
|
ω |
|
|
|
|
|
|
|
|
|
|
||||||||
|
> |
|
p |
|
|
0 |
|
|
|
− |
|
|
|
|
|
|
|
|
|
|
|
D E |
> |
− D |
|
|
|
E |
|
|
|
|
|
|
|
|
|
|
|
|
|||
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
< |
|
cosh ω dt |
|
ζ |
|
|
|
|
|
|
|
for hζ h 1 |
||||||||
|
>1 − |
ζ 2 1 sinh ω dt e−ζ ω d t |
|
||||||||||||||||||
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
− |
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
where ω d ω 0 |
|
and φ arccos ζ . When ζ 1 the step response |
|||||||||||||||||||
h1 − ζ 2h |
|||||||||||||||||||||
is a damped oscillation, with frequency |
|
|
|
|
2 |
|
|||||||||||||||
ω d |
ω 0 |
1 |
|
ζ . Notice that the |
|||||||||||||||||
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
− |
||||||
step response is enclosed by the envelopes |
p |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
e−ζ ω 0t hDtE 1 − e−ζ ω 0 t |
|
|
|
|
|||||||||||
This means that the system settles like a first order system with time
constant T |
1 |
|
. The 2% settling time is thus Ts |
4 |
|
. Step responses |
ζ ω |
0 |
ζ ω |
0 |
|||
for different values of ζ are shown in Figure 4.9. |
|
|
||||
The maximum of the step response occurs approximately at Tp π /ω d, i.e. half a period of the oscillation. The overshoot depends on the damping. The largest overshoot is 100% for ζ 0. Some properties of the step response are summarized in Table 7.3.
The system D7.10E can be interpreted as a feedback system with the loop transfer function
ω 2
LDsE 0
sDs 2ζ ω 0E
This means that we can compute quantities such as sensitivity functions and stability margins. These quantities are summarized in Table 7.3.
Second Oder System with Zeros
The response to load disturbances for a second order system with integral action can have the form
GDsE ω 0s
s2 2ζ ω 0s ω 02
The frequency response has a maximum 1/D2ζ E at ω ω 0. The step response of the transfer function is
e−ζ ω 0 t
hDtE sqrt1 − ζ 2 sinω dt
265

Chapter 7. Specifications
Table 7.3 Properties of the response to reference values of a second order system.
Property |
|
|
|
|
|
|
|
|
|
|
Value |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Rise time |
|
|
|
Tr ω 0 eφ/tanφ |
2.2Td |
|
|
|
|
|
|||||||||||||||||||||||
Delay time |
|
|
|
|
|
|
|
|
|
|
|
|
Td |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Peak time |
|
|
|
|
Tp π /ω D Td/2 |
|
|
|
|
|
|
|
|
||||||||||||||||||||
Settling time D2%E |
|
|
|
|
|
|
Ts 4/Dζ ω 0E |
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
πζ |
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Overshoot |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
ζ 2 |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
o e− |
/ |
|
|
|
− |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Error coefficients |
|
|
|
|
e0 0, e1 2ζ /ω 0 |
|
|
|
|
|
|
|
|
||||||||||||||||||||
Bandwidth |
ω |
|
ω |
|
|
1 |
|
|
|
2ζ 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
− |
|
|
|
|
|
1 |
|
|
|
2ζ 2 2 |
|
|
|
1 |
|||||||||||||||||
|
|
b |
|
0q |
|
|
|
|
|
|
D |
− |
E |
|
|
|
|
||||||||||||||||
|
|
|
|
8 |
2 |
|
|
1 4 |
l2´ |
1 |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
8 |
2 1 |
|
|
|
||||||||||||||||||||||
Maximum sensitivity |
|
|
Ms |
r |
ζ |
D ζp ET |
ζ |
|
|
|
|
|
|
||||||||||||||||||||
|
|
8ζ 2 1 D4ζ l2´ −1ET |
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
8ζ 2 1 |
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
8ζ |
2 |
1 |
ω 0 |
|
|
|
|
|
|
|
|
||||||||||
Frequency |
|
|
|
|
wms |
|
|
|
|
2 |
|
|
|
|
T |
|
|
|
|
||||||||||||||
|
|
|
1 |
2ζ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
if ζ |
|
|
|
|
2 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|||||||||||||
Max. comp. sensitivity |
Mt (1/D |
p1 |
|
− ζ |
|
|
|
E |
|
|
|
|
|
if ζ |
T |
|
|
/2 |
|||||||||||||||
|
|
|
|
|
|
|
|
2 |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
/ |
|
|||
|
|
|
|
ω |
1 |
|
|
|
2ζ |
|
2 |
|
|
|
|
if ζ |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 2 |
|
|||||||||||||||
Frequency |
ω mt (1 0p |
− |
|
|
|
|
|
|
|
|
|
if ζ |
T |
|
/2 |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
2 |
||||||||||||||||||||||||
Gain margin |
|
|
|
|
|
|
|
|
|
nm [ |
|
|
|
|
|
|
|
/ |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Phase margin |
|
ϕm 90' − arctan ω c/D2ζ ω 0E |
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
ω 0q |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
Crossover frequency |
|
ω nc |
|
|
|
|
|
− 2ζ 2 |
|
|
|
|
|
||||||||||||||||||||
|
|
|
4ζ 4T |
1 |
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
ω sc |
|
|
|
|
/ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Sensitivity frequency |
|
|
|
|
|
|
|
pω |
0 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
This could typically represent the response to a step in the load disturbance. Figure 7.7 shows the step response for different values of ζ . The step response has its maximum
max h t |
ω |
0 |
e−ζ //sqrt1−ζ 2 |
7.11 |
|||
t |
D E |
|
|
|
D E |
||
for |
|
|
|
|
|
|
|
|
t tm |
|
arccosζ |
|
|||
|
|
|
|
|
|
||
|
|
|
ω 0 |
|
|||
266 |
|
|
|
|
|
|
|
7.7 Poles and Zeros
|
1 |
|
|
|
|
0.5 |
|
|
|
h |
0 |
|
|
|
−0.5 |
|
|
|
|
|
−1 |
5 |
10 |
15 |
|
0 |
|||
|
|
|
ω 0t |
|
Figure 7.7 Step responses of the transfer function D7.11E for ζ 0 DdottedE, 0.1, 0.2, 0.5, 0.7 Ddash-dottedE, 1, 2, 5, 10 DdashedE.
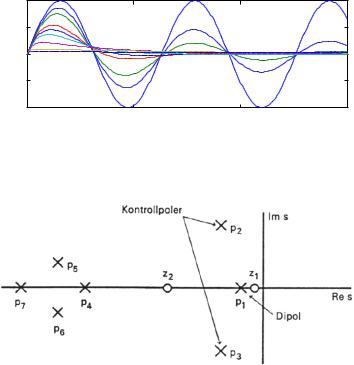
Figure 7.8 Typical configuration of poles and zeros for a transfer function describing the response to reference signals.
Systems of Higher Order
7.7 Poles and Zeros
Specifications can also be expressed in terms of the poles and zeros of the transfer functions. The transfer function from reference value to the output of a system typically has the pole zero configuration shown in Figure 7.8. The behavior of a system is characterized by the poles and zeros with the largest real parts. In the figure the behavior is dominated by a complex pole pair p1 and p2 and real poles and zeros. The dominant poles are often characterized by the relative damping ζ and the distance from the origin ω 0. Robustness is determined by the relative damping and the response speed is inversely proportional to ω 0.
267

Chapter 7. Specifications
∙Dominant poles
∙Zeros
∙Dipoles
7.8Relations Between Specifications
A good intuition about the different specifications can be obtained by investigating the relations between specifications for simple systems as is given in Tables 7.1, 7.2 and 7.3.
The Rise Time Bandwidth Product
Consider a transfer function GDsE for a stable system with GD0E 0. We will derive a relation between the rise time and the bandwidth of a system. We define the rise time by the largest slope of the step response.
T |
GD0E |
D |
7.12 |
E |
|
maxt nDtE |
|||||
r |
|
where n is the impulse response of G, and let the bandwidth be defined
as |
[ G iω |
|
|
||
|
|
|
|||
ω b |
R0 |
πhG D0 |
E |
Eh |
D7.13E |
|
|
D |
|
|
|
This implies that the bandwidth for the system GDsE 1/Ds 1E is equal
T to 1, i.e. the frequency where the gain has dropped by a factor of 1/ 2.
The impulse response n is related to the transfer function G by
|
1 |
|
|
i[ |
|
|
1 |
[ |
|
|
|
nDtE |
|
|
Z−i[ est GDsEds |
|
Z−[ eiω t GDiω Edω |
||||||
2π i |
2π |
||||||||||
Hence |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
[ |
|
|
|
1 |
|
[ |
|||
|
|
|
|
Z−[ |
|
|
|
Z0 |
|
||
maxt nDtE |
|
eiω t GDiω E dω |
|
hGDiω Ehdω |
|||||||
2π |
π |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Equations D7.12E and D7.13E now give
Trω b 1
This simple calculation indicates that the product of rise time and bandwidth is approximately constant. For most systems the product is around 2.
268
7.9 Summary
7.9 Summary
It is important for both users and designers of control systems to understand the role of specifications. The important message is that it is necessary to have specifications that cover properties of the Gang of Six, otherwise there is really no guarantee that the system will work well. This important fact is largely neglected in much of the literature and in control practice. Some practical ways of giving reasonable specifications are summarized.
269