

pan1327
.pdfМосковский авиационный институт (национальный исследовательский университет) ЭЛЕКТРОННЫЙ ЖУРНАЛ
www.mai.ru/~apg «ПРИКЛАДНАЯ ГЕОМЕТРИЯ» Выпуск 13, N 27 (2011), стр. 1-11
РЕКОНСТРУКТИВНАЯ ГЕОМЕТРИЯ КРИВОЙ ЛИНИИ
Д. С. Корчагин, К. Л. Панчук ГОУ ВПО «Омский государственный технический университет»
644050, Омск, Пр. Мира, д. 11.
E-mail: Korch-Den@yandex.ru, Panchuk_KL@mail.ru.
Аннотация. В статье рассматривается взаимосвязь дифференциально-
геометрических характеристик кривой линии и ее проекций, позволяющая восстанавливать кривизну и кручение кривой линии пространства по ее ортогональным проекциям.
Ключевые слова: пространственная кривая линия, проекции, кривизна, кручение,
направляющие косинусы, трехгранник Френе, винтовая линия.
СОДЕРЖАНИЕ Аннотация…………….…………………………………………………………………1
Введение……………………………….…………………………………………….......1
1.Определение кривизны и кручения кривой линии по ее ортогональным проекциям……………………………….……………………………………………….2
2.Пример восстановления кривизны и кручения цилиндрической винтовой линии по ее проекциям…………………….…………………………..……………………….7
Заключение……………...……………………………………………………………..11
Список использованных источников…………………..………………………….....11
Введение
В задачах геометрического моделирования пространственной кривой линии возникает необходимость оперирования с ее инвариантами – кривизной и кручением. В работе предлагается расчетный алгоритм восстановления кривизны [1]
и кручения пространственной кривой линии по ее проекциям.
(с) МАИ, 1999-2011
2 Корчагин Д.С., Панчук К.Л./ Прикладная геометрия, вып 13, № 27 стр. 1-11
1. Определение кривизны и кручения кривой линии по ее ортогональным проекциям
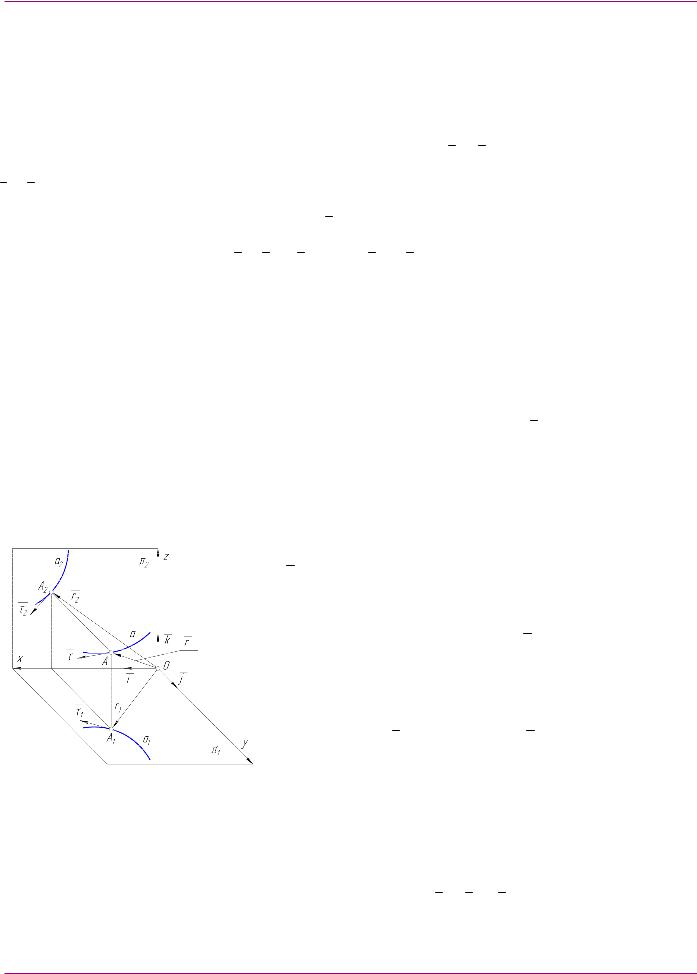
Рассмотрим пространственную кривую a, заданную своими ортогональными
проекциям a1 и a2 на плоскостях проекций π1 и π2, соответственно (рис.1). Пусть эти проекции описываются векторными уравнениями: r1 r1(s1), где s01 s1 sn1;
r2 r2(s2), где s02 s2 sn2. Тогда на основании проекционной схемы (рис. 1) имеем зависимости для радиус-вектора кривой r :
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
r1 ( |
r2 k)k |
r2 ( |
r1 j) j, |
(1) |
||||||||
что позволяет определить единичный касательный вектор искомой кривой a в
пространстве
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
dr1 |
|
ds1 |
|
dr2 |
|
ds2 |
|
|
|
|
|
|
ds1 |
|
|
|
|
|
|
|
|
ds2 |
|
|
||||||||
|
r |
|
|
|
|
|
|
|
|
|
|
|
k |
k |
1 |
|
k( 2 k) |
|
|
, |
(2) |
|||||||||||||||
ds |
ds |
ds |
2 |
ds |
ds |
|
ds |
|||||||||||||||||||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
а также получить выражение второй производной радиус-вектора |
r |
(s) |
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
ds |
2 |
|
|
|
|
d2s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
2s |
|
|
|
|
|
|
|
|
|
|
|
|
ds |
|
|
2 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|||||||
r k |
k |
|
ds |
|
|
|
|
ds2 |
|
k ( |
|
|
k) |
|
|
|
|
( |
|
|
k)k |
|
|
ds |
|
. |
(3) |
|||||||||||||||||||||||||||||||
|
|
|
|
|
1 1 |
|
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
ds2 |
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Уравнение (2) |
можно |
|
|
представить в |
виде |
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(r k |
)k , |
|
где |
|
|
точками, |
|
|
обозначено |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
дифференцирование по параметру s. Очевидно, |
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
для |
определения |
|
|
|
вектора |
|
в |
|
|
точке A a c |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
параметром s, необходимо выполнение для этой |
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
точки хотя бы одного из условий: |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
dr1 |
|
ds1 |
0; r |
|
dr2 |
|
ds2 |
0, |
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ds |
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
ds |
|
|
|
|
|
|
2 |
|
|
ds |
2 |
|
|
|
|
ds |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
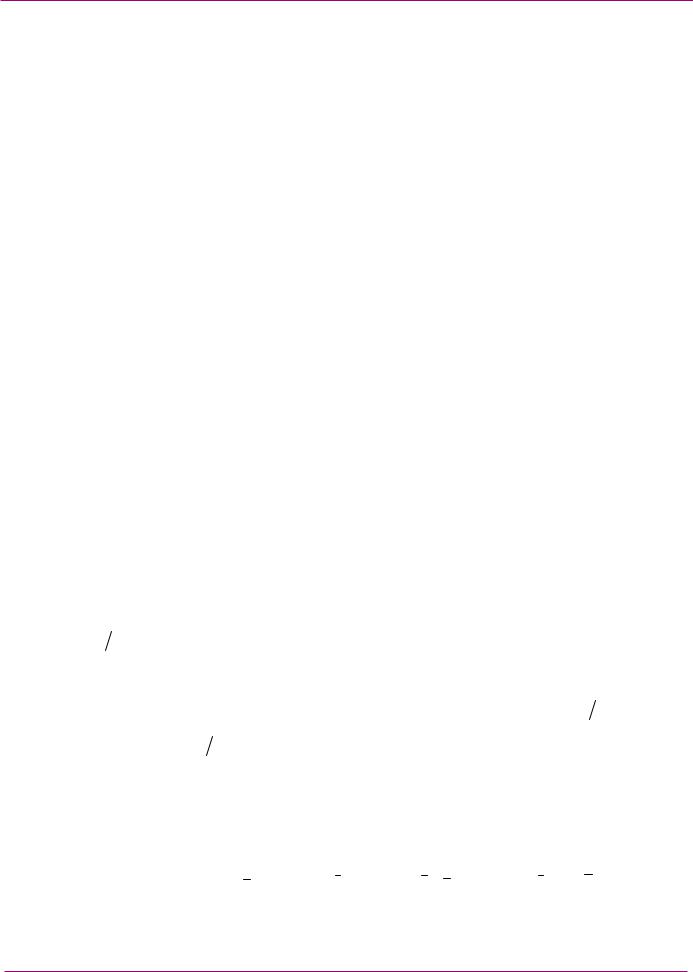
Рис. 1 Проекционная схема для |
|
|
каждое, из которых соответствует достаточному |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
пространственной кривой |
|
|
|
|
признаку |
существования |
обыкновенных |
точек |
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
[2] A1 a1, A2 a2, |
проекционно-соответственных точке A a с параметрами s1 и s2 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
соответственно. Уравнение проекции a1 имеет вид |
|
r1 |
|
( |
|
|
|
|
|
, |
что позволяет |
|||||||||||||||||||||||||||||||||||||||||||||||
|
r |
r |
k |
)k |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
(с) МАИ, 1999-2011
Корчагин Д.С., Панчук К.Л./ Прикладная геометрия, вып 13, № 27 стр. 1-11 3
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
dr1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
определить производную радиус-вектора |
|
r |
: |
|
|
|
|
|
|
|
|
|
r2 |
|
|
( |
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
k |
)k . |
На |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
ds |
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|||||
основании чего запишем выражение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
r |
2 1 ( |
|
|
)2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4) |
|||||||||||||||||
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Последнее уравнение на основании (2) можно преобразовать к виду |
|
|||||||||||||||||||||||||||||||||||||||||||
|
r |
2 1 |
( |
|
|
|
) |
ds2 |
2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(5) |
|||||||||
|
2 |
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
ds |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
ds |
2 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Учитывая, что имеет место |
выражение |
|
r |
|
|
|
|
|
r |
|
|
|
1 |
|
, уравнение |
(5) |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
ds |
|
|
|
|
|
|
|
|
|||||
можно записать следующим образом: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
ds |
2 |
|
|
|
|
|
|
|
ds |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
k) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
1 |
1 |
( 2 |
|
|
|
2 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(6) |
|||||||||||||||||
ds |
|
ds |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Для кривых a1 и a2, принятых в качестве ортогональных проекций некоторой кривой a пространства, имеют место тождественные равенства
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r1 i |
r2 i |
|
|
r |
i . |
|
|
|
|
|
|
|
|
(7) |
||||||||||||||||||||||||||||||
Дифференцируя эти равенства по параметру s, получим |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
1 |
|
|
|
ds1 |
|
|
2 |
|
|
|
|
|
|
|
ds2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
i |
|
i |
|
i |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(8) |
||||||||||||||||||||||||||||||||||||||||||
|
ds |
ds |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
откуда следует: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ds1 |
|
|
|
|
|
|
|
|
ds2 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(9) |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
ds |
1 i |
|
|
|
|
|
|
|
ds |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
Из сравнения уравнений (6) и (9) следует выражение производной |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ds |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
|
|
|
|
|
|
)2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1/2 |
|
|
|
|||||||||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
(10) |
|||||||||||||
|
ds |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
( |
2 k) |
|
|
|
|
( 1 i) |
|
|
( 2 i) |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
Последнее уравнение позволяет преобразовать выражение (9) к виду |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
ds |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
|
|
|
|
|
|
)2 |
|
|
|
|
|
|
|
|
|
1/2 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
i |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
(11) |
||||||||||||||||
|
|
|
ds |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
2 |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( 1 i) |
( 2 i) |
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
( 2 k) |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
Повторное дифференцирование (11) приводит к выражению второй производной
(с) МАИ, 1999-2011
4 Корчагин Д.С., Панчук К.Л./ Прикладная геометрия, вып 13, № 27 стр. 1-11
|
|
|
|
|
|
|
|
d2s |
|
|
3 k |
2 |
2 2 k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
1 |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(12) |
|||||
|
|
|
|
|
|
|
|
ds2 |
|
|
2 2 |
2 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
в котором приняты следующие обозначения: 1 i |
; |
|
1 i |
; |
2 i ; |
2 i ; |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
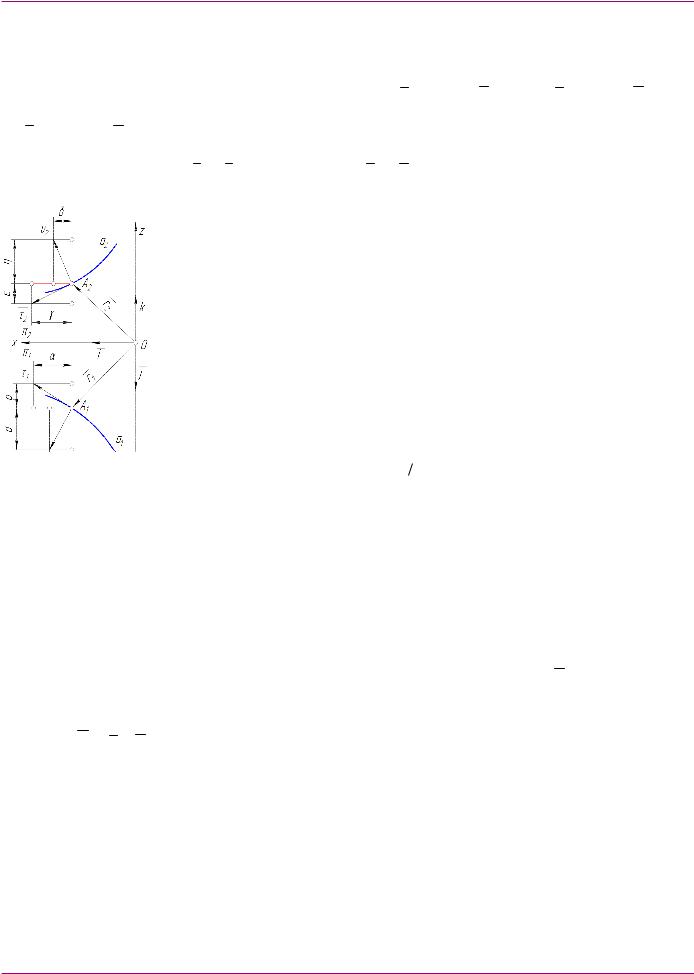
2 k |
; |
2 k (где α, |
β, |
|
γ, |
|
δ, ε, |
|
η – направляющие косинусы единичных |
|||||||||||||||||||||||||||||
векторов касательных 1, |
2 |
и |
|
нормалей 1 , |
2 |
проекций |
a1 и a2 кривой a, |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
образованные |
|
с |
ортами |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
i |
, |
|
|
j, k |
базовой |
системы |
||||||||||||||||||||||||
|
|
|
|
|
|
|
координат xOyz кривой a (рис.2). Повторное |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
дифференцирование выражения (10) также приводит к |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
выражению второй производной: |
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
d2s |
2 |
|
|
2 2 k |
2 |
3k |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
. |
|
|
|
|
|
|
|
(13) |
||||||
|
|
|
|
|
|
|
|
|
|
|
ds2 |
|
|
2 2 |
2 2 |
|
|
|
|
|
|
|
|
|||||||||||||||
Рис.2 Единичные векторы касательных и нормалей проекций кривой
Полученные формулы позволяют выразить из уравнения (3) кривизну k искомой кривой a пространства
(14)
|
|
|
|
|
|
|
|
|
|
|
|
|
d2s |
|
где |
приняты следующие |
|
обозначения: A |
1 |
, |
|||||||||
|
ds2 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ds |
|
2 |
d2s |
|
|
|
ds |
|
2 |
|
|
||
B k |
|
1 |
|
, C |
|
2 |
k |
|
|
|
2 |
. |
|
|
ds |
ds2 |
|
ds |
|
|
|||||||||
1 |
|
|
|
|
2 |
|
|
|
|
|||||
Вновь обращаясь к уравнению (3) видим, что оно с учетом выражений (10), (11), (12), (13) позволяет определить в пространстве вектор нормали кривой а, по ее заданным ортогональным проекциям. Это дает возможность из известной
формулы определить вектор бинормали рассматриваемой кривой, а значит и трехгранник Френе, связанный с этой кривой.
Далее перейдем к раскрытию взаимосвязи кручения кривой линии а с ее заданными ортогональным проекциям a1 и a2, для чего выполним дифференцирование выражения (3) по параметру s, в результате чего получим:
(с) МАИ, 1999-2011
Корчагин Д.С., Панчук К.Л./ Прикладная геометрия, вып 13, № 27 стр. 1-11 5
|
|
|
|
|
|
|
ds |
2 |
|
|
|
|
|
|
|
ds 2 |
|
|
|
|
|
|
ds d2s |
|
|
|
|
|
|
|
|
d2s |
|
|
|
|
|
|
|
d3s |
|
|
|
d2s |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
|||||||||||||
r |
|
k |
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
k 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|||||||||||||||||||||
|
|
ds |
ds |
|
|
ds ds2 |
|
|
|
|
ds2 |
|
|
|
|
ds3 |
ds2 |
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
1 1 |
|
|
|
|
|
|
1 1 |
|
|
|
|
1 1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
(15) |
||||||||||||||||||||||||||||||
|
|
|
|
|
d3s |
|
|
|
|
|
|
|
ds |
|
|
|
2 |
|
|
|
|
|
ds |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
ds |
|
|
d2s |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
k |
|
2 |
k k |
|
2 |
|
k k |
|
2 |
|
k k |
|
2 |
2 |
2 |
|
, |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
ds3 |
|
|
|
ds |
|
|
|
|
|
|
|
|
ds |
|
|
ds2 |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
ds |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
d 1 ds1 |
|
|
|
|
|
|
|
|
|
|
ds1 |
|
|
|
|
|
d 1 ds1 |
|
|
|
|
|
ds1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
где 1 |
|
|
|
|
|
|
|
|
|
|
|
1k1 |
|
|
|
; 1 |
|
|
|
|
|
|
|
|
|
|
1k1 |
|
|
- производные единичных векторов |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
ds |
|
|
ds |
|
|
ds |
|
ds |
|
|
|
|
ds |
ds |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1 |
и 1 |
проекции a1 |
по длине дуги s пространственной кривой линии а, |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
ds1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
ds2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
|
|
|
k2 |
|
|
|
; |
|
|
|
|
|
|
|
k2 |
|
|
|
; |
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
ds |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 2 2 |
|
|
|
ds |
|
2 2 2 |
|
|
|
|
|
2 2 2 |
2 2 2 |
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
d3s |
|
|
|
|
ds |
|
2 |
|
2 |
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
k |
2 |
|
|
|
|
|
2 |
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
k |
|
2 |
|
|
|
1 |
|
k |
|
|
|
k 5 4 |
|
|
|
k |
|
|
|
k |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
2 |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
ds3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
1 |
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
ds |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
4 k |
|
|
k |
ds |
2 |
|
|
d |
2s |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
α2ε2 γ2 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
1 ds ds2 2 2 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
d3s |
2 |
|
|
ds |
2 |
|
2k k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 2 1 2k 2 2k |
2 1 2 2 |
2 k |
2 |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
ds3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
ds |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
4 k2 k2 |
ds2 |
d2s2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
2 2 2 2 |
ds |
|
ds2 |
|
|
2 2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
- производные по s, выраженные через направляющие косинусы единичных векторов касательных и нормалей проекций кривой.
Подставляя выражения для 1 , 1 и следующие за ними выражения в (15),
после приведения подобных членов, получаем
|
|
|
|
|
|
|
|
|
r 1F 1K |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
kL, |
|
|
|
|
3 |
||||||||||
|
|
|
|
|
|
|
|
|
|
F |
d |
3s |
k |
2 |
ds |
|||||||||
где |
приняты |
обозначения |
|
|
1 |
|
|
|
1 |
|
, |
|||||||||||||
|
ds |
|
ds |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
ds |
2 |
2 |
|
|
|
|
d2s |
|
|
ds |
2 |
|
|
|
|
|
d3s |
2 |
|
|
|
|
||
L |
|
k |
|
k |
|
2 |
2 k |
|
|
|
|
|
|
|
|
. |
|
|
||||||
ds |
|
ds2 |
2 ds |
|
|
|
|
|
|
|
||||||||||||||
|
|
2 |
|
2 |
|
|
|
|
|
|
|
ds3 |
|
|
|
|||||||||
|
|
|
|
|
|
(16) |
|
K 3k |
ds |
|
d2s |
k |
ds |
2 |
|
1 |
|
1 |
|
1 |
, |
||
|
ds2 |
ds |
|||||
1 ds |
|
1 |
|
||||
Обозначив |
ds1 |
D, |
( |
|
|
|
) |
ds2 |
E , запишем первую производную радиус- |
|
2 |
k |
|||||||||
|
||||||||||
|
ds |
|||||||||
|
ds |
|
|
|
|
|
|
|||
вектора кривой а (2) в следующем виде:
(с) МАИ, 1999-2011
6 Корчагин Д.С., Панчук К.Л./ Прикладная геометрия, вып 13, № 27 стр. 1-11
|
|
|
|
|
|
|
|
|
|
|
|
|
r 1D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(17) |
||||||||||
|
|
|
|
|
|
|
|
kE, |
|
|||||||||||||||||||||||||||||
|
|
|
С учетом принятых обозначений A, B и C запишем выражение второй |
|||||||||||||||||||||||||||||||||||
производной радиус-вектора кривой а (3) в виде: |
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(18) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
r 1A 1B kC. |
|
||||||||||||||||||||||||
|
|
|
Выразив в (16), (17), (18) единичные векторы касательных 1, 2 и нормалей 1 , |
|||||||||||||||||||||||||||||||||||
2 |
проекций a1 и a2 кривой a их направляющими косинусами, представим векторы r |
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
,r |
,r компонентами по ортам i , j, k базовой системы координат xOyz кривой а в |
|||||||||||||||||||||||||||||||||||||
следующем виде: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
r i |
D |
|
|
|
|
|
|
|
E, |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
D k |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
j |
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(19) |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
r i ( A B) j ( A B) k C , |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
r i |
( F K) |
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
( F K) k |
L, |
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
j |
|
|
||||||||||||||||||||||||||||
где 1 |
|
, 1 |
|
|
- направляющие косинусы (см. рис.2), |
откуда очевидно |
||||||||||||||||||||||||||||||||
j |
j |
|||||||||||||||||||||||||||||||||||||
x D, y D, z E, |
x A B, y A B, z C , x F K, y F K , |
|||||||||||||||||||||||||||||||||||||
z L. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таким образом, получены зависимости производных r , |
r , |
r радиус-вектора |
|||||||||||||||||||||||||||||||||
|
r |
по длине дуги s (19) от данных, заданных на проекциях кривой, что позволяет на |
||||||||||||||||||||||||||||||||||||
основе известного из дифференциальной геометрии выражения для кручения кривой линии [2]
x y z
x y z
x y zx2 y2 z2
определить зависимость кручения рассматриваемой линии a от ее проекций a1 и a2
|
BL CK D AK FB E |
. |
(20) |
|
|||
|
k2 |
|
|
Из формул (2), (10), (11) вытекают следующие предложения:
1. Касательная к кривой проецируется в общем случае в касательную к проекции кривой, что соответствует известной теореме [3].
(с) МАИ, 1999-2011
Корчагин Д.С., Панчук К.Л./ Прикладная геометрия, вып 13, № 27 стр. 1-11 7 2. Касательные к проекциям кривой в их проекционно-соответственных точках определяют касательную к кривой в пространстве.
Из формул (3), (10),…,(14) вытекают следующие предложения:
1.Нормаль к кривой в пространстве в общем случае не проецируется в нормаль к проекции кривой.
2.Задание касательных к проекциям кривой в их проекционно-соответственных точках и задание в этих точках значений кривизны проекций кривой определяют: а)
трехгранник Френе пространственной кривой в точке, соответствующей ее точкам-
проекциям; б) значение кривизны пространственной кривой в этой точке.
Из формулы (20) и входящих в нее выражений вытекает следующее предложение:
задание касательных к проекциям кривой в их проекционно-соответственных точках и задание в этих точках значений кривизны проекций кривой и скоростей изменения кривизны определяют кручение пространственной кривой в этой точке.
2. Пример восстановления кривизны и кручения цилиндрической винтовой
линии по ее проекциям
Пусть цилиндрическая винтовая линия задана на плоскости проекций π1
окружностью a1, уравнения которой имеют вид: x1 R1cos t1; |
y1 R1sin t2; |
|||
0 |
2 , а |
на |
плоскости проекций π2 косинусоидой a2 |
с уравнением |
x |
2 R2cos z2 |
t3 |
(рис. 3). Из условия выполнения проекционного соответствия |
|
рассматриваемых линий a1 и a2 на комплексном чертеже вытекают следующие |
||||
равенства: R1=R2=R; t1=t3=t; x1=x2, которые, приводят к уравнению cos z2 |
cos . |
||||
Из него следует |
z2 |
. |
Для обеспечения |
проекционной |
взаимной |
однозначности линий |
a1 |
и a2 |
принимаем z2 , |
где λ - вещественный |
|
коэффициент. Таким образом, φ является общим параметром в уравнениях кривых a1 и a2. Учитывая это обстоятельство, запишем уравнения радиус-векторов,
описывающих кривые a1 и a2: r1 Rcos i Rsin j, r2 Rcos i k .
(с) МАИ, 1999-2011
8 Корчагин Д.С., Панчук К.Л./ Прикладная геометрия, вып 13, № 27 стр. 1-11
Продифференцировав r1и r2 по параметру φ получим:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dr1 |
|
dr1 |
|
|
ds1 |
|
|
1 |
|
ds1 |
, |
|
dr2 |
|
|
dr2 |
|
ds2 |
|
2 |
|
|
ds2 |
, |
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d ds |
|
|
d |
|
|
|
|
|
|
d d ds |
|
|
|
|
d |
|
|
d |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ds |
|
|
|
|
|
|
|
dr |
|
|
|
|
|
|
|
|
dr |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
R, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ds |
|
|
|
|
|
|
|
|
|
|
dr |
|
|
|
|
|
|
|
dr |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R2 sin2 2 . |
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Рис. 3 Проекции винтовой линии |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Откуда |
|
|
|
|
|
|
|
|
|
определим |
|
|
|
|
|
|
|
|
|
|
единичные |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
касательные векторы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
dr |
|
|
|
ds |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dr |
|
|
|
|
ds |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rsin i |
k |
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
1 |
|
|
|
1 |
|
|
|
|
1 |
|
sin i |
cos j, |
2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(R2 sin |
2 2)1 2 |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
d |
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
d |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Повторное дифференцирование дает выражения: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
d2 |
r |
|
|
|
|
|
|
|
|
ds 2 |
|
|
|
|
d2s |
|
|
|
d |
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ds |
|
2 |
|
|
|
|
|
d |
2s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
k |
|
|
1 |
|
1 |
|
|
|
1 |
, |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
k |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
2 |
|
|
, |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
d |
2 |
|
|
|
1 1 |
|
|
|
|
|
|
|
|
2 |
|
|
d |
2 |
|
|
|
|
|
|
|
|
|
2 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
где k |
|
|
1 |
, |
|
d2s1 |
|
|
0, k |
|
|
|
|
|
|
|
|
|
Rcos |
|
|
|
|
|
|
|
|
|
|
, |
|
d2s2 |
|
|
|
|
R2 cos sin |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
1 |
|
R |
|
d 2 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
(R2 sin2 2)3 |
2 |
|
|
|
|
|
|
d 2 |
|
|
|
|
|
|
|
(R2 sin2 2)1 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Отсюда определим единичные векторы нормалей: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d2 |
r |
|
|
|
|
d2s |
|
|
|
|
|
|
|
ds 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
k |
|
|
|
|
1 |
|
|
|
|
|
cos i sin j, |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d2 |
r |
|
|
|
|
d2s |
|
|
|
|
|
|
|
|
|
|
|
ds |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
Rsin k |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
k |
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
2 1 2 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
d |
|
|
|
|
(R |
|
sin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
Теперь, зная единичные векторы касательных и нормалей, найдем выражения для их направляющих косинусов:
1 i sin ;
1 i cos ;
(с) МАИ, 1999-2011
Корчагин Д.С., Панчук К.Л./ Прикладная геометрия, вып 13, № 27 стр. 1-11 9
Rsin
2 i (R2 sin2 2)1 2 ;
2 ;
2 i (R2 sin2 2)1 2 ;
2 ;
2 k (R2 sin2 2)1 2 ;
2 ;
Rsin
2 k (R2 sin2 2)1 2 ;
2 ;
1 j cos ;
1 j sin .
Подставляя найденные выражения параметров в (10), (11), (12) и (13),
находим:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ds1 |
|
|
|
|
|
|
R |
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(R |
2 |
|
|
|
|
|
2 |
|
1 2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ds |
|
|
|
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ds |
2 |
|
|
|
(R2 sin2 2)1 2 |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(R |
2 |
|
|
|
|
|
2 |
|
1 2 |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ds |
|
|
|
|
|
|
|
|
|
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
2s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
0; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ds2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d2s |
|
|
|
|
|
|
|
|
|
|
|
R2 sin cos |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ds |
2 |
|
(R |
2 |
|
|
|
|
|
2 |
|
|
|
2 |
|
sin |
2 |
|
|
|
|
2 1 2 |
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
)(R |
|
|
|
) |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
Откуда получаем выражения для коэффициентов: |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A 0; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
R |
|
|
|
|
|
2 |
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2 |
; |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(R |
|
|
|
2 1 2 |
|
R |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R2 sin cos |
|
|
|
|
|
|
|
Rsin |
|
|||||||||||||||||||||||||
(R |
2 |
sin |
2 |
|
|
|
2 1 2 |
(R |
2 |
|
|
|
|
2 |
|
|
2 |
sin |
2 |
|
|
|
|
|
2 1 2 |
|
(R |
2 |
sin |
2 |
2 1 2 |
|||||||||||||||||||||||||||||
|
|
|
|
|
) |
|
|
|
|
|
|
|
|
)(R |
|
|
|
) |
|
|
|
|
) |
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
Rcos |
|
|
|
|
|
|
(R |
2 |
sin |
2 |
|
|
|
|
|
2 |
1 2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0, |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
2 |
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 1 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
(R |
sin |
|
|
3 2 |
|
|
|
|
|
|
(R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
дающие |
на |
|
основании |
|
|
формулы |
|
|
(14) |
|
окончательное |
|
выражение |
кривизны |
||||||||||||||||||||||||||||||||||||||||||||||
(с) МАИ, 1999-2011
10 Корчагин Д.С., Панчук К.Л./ Прикладная геометрия, вып 13, № 27 стр. 1-11
R
k R2 2 , совпадающее с известной формулой [2] для вычисления кривизны
цилиндрической винтовой линии.
Для определения кручения винтовой линии найдем недостающие коэффициенты выражения (20), которые принимают следующий вид:
D |
|
|
R |
|
|
|
; |
|||
(R |
2 |
2 |
1 2 |
|
||||||
|
|
|
|
) |
||||||
E |
|
|
|
|
|
|
; |
|||
|
|
|
|
|||||||
|
2 |
2 |
1 2 |
|||||||
|
|
|
(R |
|
) |
|||||
F |
|
|
R |
|
|
; |
||||
|
2 |
2 |
|
3 2 |
||||||
|
|
|
(R |
|
) |
|
|
|
|
|
K0;
L0,
после подстановки, которых в (20), получим выражение для кручения R2 2 ,
совпадающее с известной формулой [2] для вычисления кручения цилиндрической винтовой линии.
Выражение (2) дает единичный вектор касательной для рассматриваемой линии в виде:
|
|
|
Rsin |
|
|
|
Rcos |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
i |
j |
|
|
|
k . |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
(R |
2 |
|
2 1 2 |
(R |
2 |
|
2 1 2 |
(R |
2 |
|
2 1 2 |
|||||||||||
|
|
|
) |
|
|
|
|
) |
|
|
|
|
) |
|
|
|
||||||
Выражение (3) дает единичный вектор нормали для рассматриваемой линии в
виде:
cos i sin j.
На основании формулы получаем единичный вектор бинормали в
виде:
|
|
|
sin |
|
|
|
cos |
|
|
|
|
|
R |
|
|
|
||||
|
i |
j |
|
|
k . |
|||||||||||||||
(R |
2 |
2 1 2 |
(R |
2 |
2 1 2 |
(R |
2 |
2 1 2 |
||||||||||||
|
|
|
|
) |
|
|
|
|
) |
|
|
|
|
) |
|
|
|
|||
Таким образом, восстановленный по проекциям a1 и a2 трехгранник Френе,
(с) МАИ, 1999-2011