

Метрические задачи
.pdfПример решения задачи на определение натуральной величины плоскости АВС, если ось вращения - горизонталь, приведен на рисунке 6.
Построения выполняют согласно следующему алгоритму:
1.В плоскости АВС через точку А проводят горизонталь h (h1, h2), которая будет являться осью вращения;
2.Точка А принадлежит оси вращения, следовательно, она останется неподвижной, изменят положение точки В и С;
3.Через точку В проводят плоскость вращения (плоскость Σ).
Данная плоскость перпендикулярна горизонтали h (h1, h2), на комплексном чертеже ее горизонтальная проекция будет перпендику-
лярна горизонтальной проекции горизонтали (Σ1 ┴ h1);
4.Находят проекции центра вращения - точки О (О1, О2). Проекцию О1 определяют как точку пересечения горизонтальной проекции плоскости Σ и горизонтальной проекции горизонтали h
(Σ1 ∩ h1), фронтальную проекцию строят по принадлежности точки прямой;
5.Определяют натуральную величину радиуса вращения ОВ (О1В0) по правилу прямоугольного треугольника;
6.на линии Σ1 от точки О1 откладывают отрезок О1В*1, рав-
ный натуральной величине радиуса вращения (отрезку О1В0), точка В*1 – горизонтальная проекция нового положения точки В;
7.Для определения нового положения точки С (С*1) через точки В*1 и 11 (11 принадлежит горизонтальной проекции горизон-
тали) проводят прямую, через точку С1 - проекцию ∆1 плоскости вращения точки С. Точка их пересечения – искомая горизонтальная проекция С*1 нового положения точки С;
8. Линия А1В*1С*1 - натуральная величина треугольника
АВС.
10
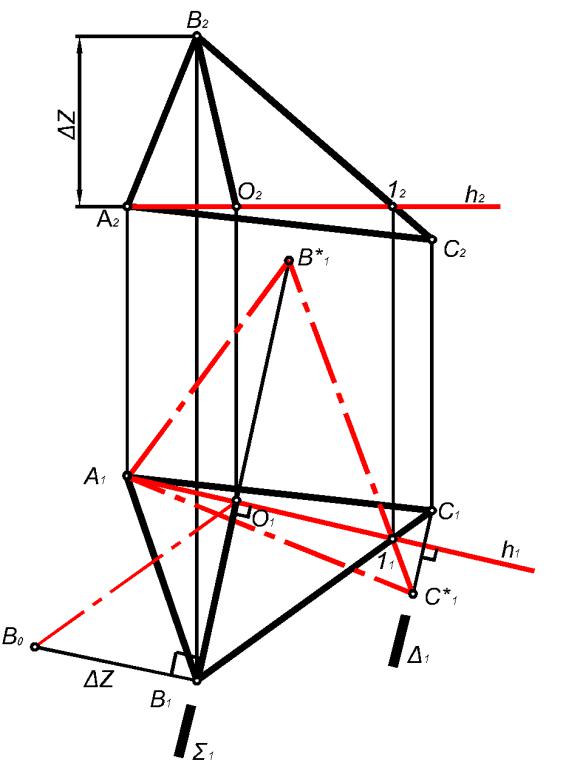
Рисунок 6 – Решение задачи вращением вокруг горизонтали
11
Пример решения задачи, если ось вращения - фронталь, приведен на рисунке 7.
Построения выполняют согласно следующему алгоритму:
1.В плоскости АВС через точку А проводят фронталь f (f1, f2), которая будет являться осью вращения;
2.Точка А принадлежит оси вращения, следовательно, она останется неподвижной, изменят положение точки В и С;
3.Через точку В проводят плоскость вращения (плоскость Σ).
Данная плоскость перпендикулярна горизонтали f (f1, f2), на комплексном чертеже ее фронтальная проекция будет перпендикуляр-
на фронтальной проекции фронтали (Σ2 ┴ f2);
4.Находят проекции центра вращения точки О (О1, О2). Проекцию О2 определяют как точку пересечения фронтальной проекции плоскости Σ и фронтальной проекции фронтали f (Σ2 ∩ f2), горизонтальную проекцию строят по принадлежности точки прямой;
5.Вращением вокруг горизонтально проецирующей прямой определяют натуральную величину радиуса вращения ОВ (О2В0);
6.На линии Σ2 от точки О2 откладывают отрезок О2В*2, рав-
ный натуральной величине радиуса вращения (отрезку О2В0), точка В*2 – фронтальная проекция нового положения точки В;
7.Для определения нового положения точки С (С*2) через точки В*2 и 12 (12 принадлежит фронтальной проекции фронтали)
проводят прямую, через точку С2 - проекцию ∆2 плоскости вращения точки С. Точка их пересечения – искомая фронтальная проекция С*2 нового положения точки С;
8. Линия А2 В*2 С*2 - натуральная величина треугольника
АВС.
12
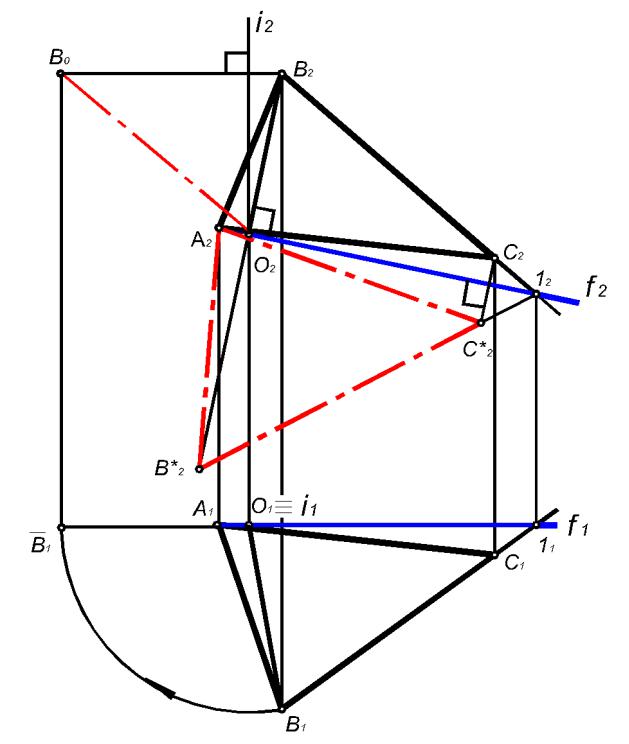
Рисунок 7 – Решение задачи вращением вокруг фронтали
13
Определение кратчайшего расстояния от точки до плоскости
Кратчайшим расстоянием от точки до плоскости является перпендикуляр, опущенный из точки на эту плоскость. Прямой угол проецируется без искажения на плоскость проекций, если одна из его сторон - линия уровня, а другая не перпендикулярна этой плоскости. Перпендикуляр к плоскости будет линией уровня, если сама эта плоскость будет плоскостью проецирующей. Таким образом, для решения данной задачи плоскость общего положения необходимо преобразовать в плоскость проецирующую.
Пример решения задачи приведен на рисунке 8. Построения выполняют согласно следующему алгоритму:
1.Проводят ось х12, разделяющую проекции на плоскости П1
иП2, в удобном для выполнения построений поле чертежа;
2. В плоскости АВС через точку С проводят горизонталь h
(h1, h2);
3.Вводят новую плоскость проекций П4, перпендикулярную плоскости проекций П1 и горизонтали h. Новую ось х14 проводят перпендикулярно горизонтальной проекции горизонтали h1;
4.Из точек А1, В1, С1, S1 проводят линии связи, перпендикулярные оси х14, замеряют расстояния от оси х12 до фронтальных проекций этих точек и откладывают их по соответствующим лини-
ям связи от оси х14;
5.В системе плоскостей проекций (П1, П4) плоскость АВС стала проецирующей плоскостью, а перпендикуляр к ней будет ли-
нией уровня (параллелен плоскости П4), проекция А4В4С4 – прямая линия;
6.Из точки S4 опускают перпендикуляр S4К4 к линии А4В4С4, отрезок S4К4 – натуральная величина расстояния от точки S до плоскости АВС;
7.Для определения горизонтальной и фронтальной проекций
точки К из точки К4 проводят линию связи, перпендикулярную оси х14, а из точки S1 – линию, параллельную оси х14. Точка пересечения этих линий будет горизонтальной проекцией К1 основания перпендикуляра к плоскости. Для нахождения фронтальной проекции
проводят линию связи из точки К1 перпендикулярно оси х12 и откладывают расстояние, замеренное от оси х14 до проекции К4. Отрезок SК (S1К1, S2К2) - кратчайшее расстояние до плоскости АВС.
14
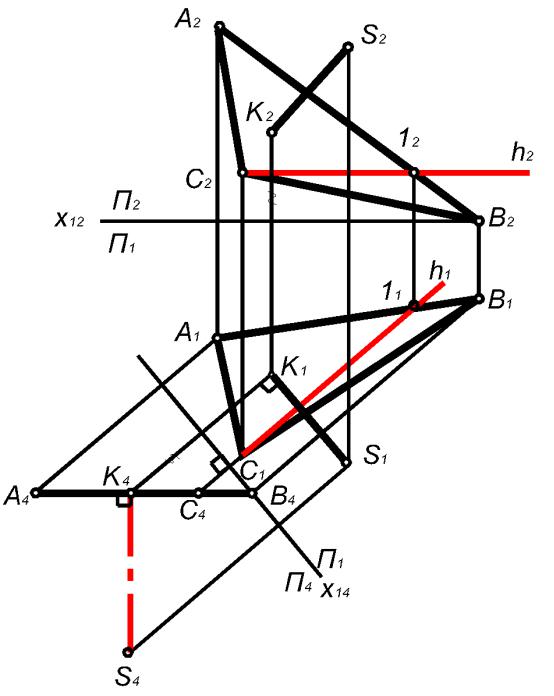
Рисунок 8 – Определение расстояния от точки до плоскости
15
Определение натуральной величины двугранного угла
Двугранный угол между плоскостями измеряют линейным углом, который получается, если эти плоскости пересечь третьей плоскостью, перпендикулярной линии пересечения заданных плоскостей (ребру АВ). В случае, когда линия пересечения является проецирующей прямой, третья плоскость будет плоскостью уровня и линейный угол спроецируется в натуральную величину. Таким образом, для определения натуральной величины двугранного угла при ребре АВ необходимо прямую преобразовать в проецирующую.
Пример решения задачи приведен на рисунке 9. Построения выполняют согласно следующему алгоритму:
1.Проводят ось х12, разделяющую проекции на плоскости П1
иП2, в удобном для выполнения построений поле чертежа;
2.Вводят новую плоскость проекций П4, перпендикулярную плоскости проекций П1 и параллельную прямой АВ. Новую ось х14 проводят параллельно горизонтальной проекции ребра АВ (х14 ║
А1В1);
3. Из точек А1, В1, С1, S1 проводят линии связи, перпендикулярные оси х14, замеряют расстояния от оси х12 до фронтальных проекций этих точек и откладывают их по соответствующим линиям связи от оси х14;
4.В системе плоскостей проекций (П1, П4) прямая АВ стала прямой уровня, А4В4 – натуральная величина отрезка АВ;
5.Вводят еще одну плоскость проекций П5, перпендикулярную плоскости проекций П4 и перпендикулярную прямой АВ. Новую ось х45 проводят перпендикулярно проекции ребра А4В4 ;
6.Из точек А4, В4, С4, S4 проводят линии связи, перпендикулярные оси х45, замеряют расстояния от оси х14 до проекций А1, В1, С1, S1 и откладывают их по соответствующим линиям связи от оси
х45;
7. В системе плоскостей проекций (П4, П5) прямая АВ стала проецирующей прямой, плоскости АВС и АВS – проецирующими плоскостями и двугранный угол между ними (угол φ) спроецировался в натуральную величину.
16
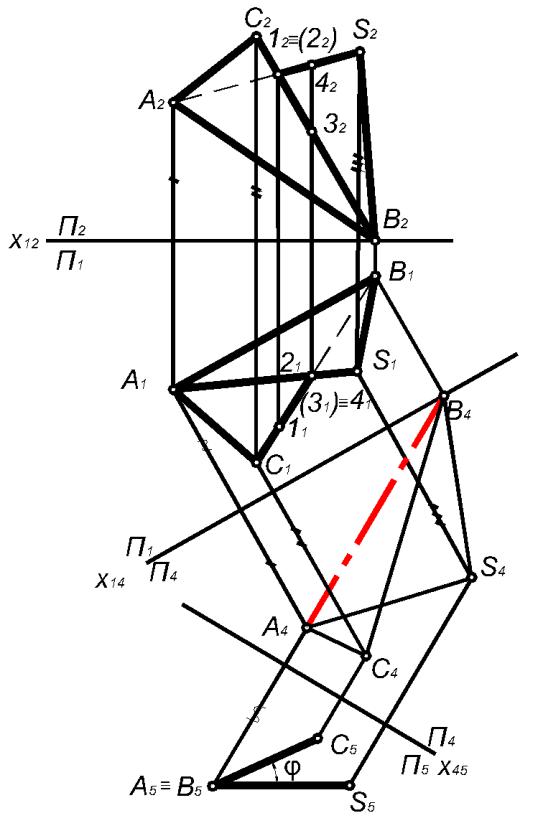
Рисунок 9 – Определение натуральной величины двугранного угла
17
Определение кратчайшего расстояния между скрещивающимися прямыми ВС и АS
Кратчайшее расстояние между двумя скрещивающимися прямыми определяется длиной перпендикуляра MN, общего к заданным прямым. Если одна из прямых является прямой уровня, то перпендикуляр к ней будет прямой уровня и угол по теореме о проецировании прямого угла изобразится в натуральную величину. Для решения задачи на определение кратчайшего расстояния необходимо преобразовать прямую (например, ВС) в прямую уровня.
Пример решения задачи приведен на рисунке 10. Построения выполняют согласно следующему алгоритму:
1.Проводят ось х12, разделяющую проекции на плоскости П1
иП2, в удобном для выполнения построений поле;
2.Вводят новую плоскость проекций П4, перпендикулярную плоскости проекций П1 и параллельную ребру ВС. Новую ось х14 проводят параллельно горизонтальной проекции ребра ВС (х14 ║
В1С1);
3. Из точек А1, В1, С1, S1 проводят линии связи, перпендикулярные оси х14, замеряют расстояния от оси х12 до фронтальных проекций этих точек и откладывают их по соответствующим линиям связи от оси х14;
4.В системе плоскостей проекций (П1, П4) прямая ВС стала прямой уровня, В4С4 – натуральная величина отрезка ВС;
5.Вводят еще одну плоскость проекций П5, перпендикулярную плоскости проекций П4 и перпендикулярную ребру ВС. Новую ось х45 проводят перпендикулярно проекции ребра В4С4 ;
6.Из точек А4, В4, С4, S4 проводят линии связи, перпендикулярные оси х45, замеряют расстояния от оси х14 до проекций А1, В1, С1, S1 и откладывают их по линиям связи от оси х45;
7.В системе плоскостей проекций (П4, П5) прямая ВС стала проецирующей прямой. Из точки В5 (В5 ≡ С5) проводят перпендикуляр M5N5 к проекции A5S5. Отрезок M5N5 является натуральной величиной кратчайшего расстояния между прямыми BC и AS.
8.Проекции точки N находят по принадлежности точки прямой AS, проводя линии связи перпендикулярно осям проекций;
9.Для нахождения проекции М4 из точки N4 проводят линию, параллельную оси х45 до пересечения с A4S4, остальные проекции строят по принадлежности точки прямой ВС.
18
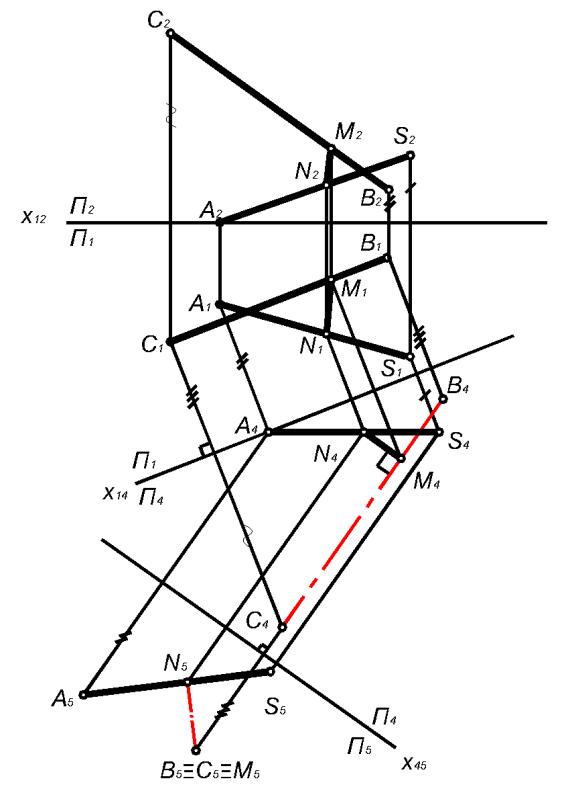
Рисунок 10 – Определение кратчайшего расстояния между скрещивающимися прямыми
19