

Подземка
.pdfДля придания невозмущаемости |
погрешностей системы линейными |
|
|
|
|
ускорениями составляющие вектора |
h |
в (15) должны вычисляться по |
значениям линейной скорости (VN ,VE ) и значениям широты места,
выработанным в БИНС на основе информации, полученной от акселерометров СП.
|
|
E |
VN |
|
|
|
|
|
|
VE |
|
||||
|
|
|
|
|
|
, N cos cos |
|
, |
|||||||
|
R |
|
R |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
VE |
|
|
|
|
|
|
|
h sin sin |
|
tg , |
|
|
(16) |
||||||||
|
R |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где |
7,292116 10 51/ c |
- угловая скорость суточного вращения Земли, а |
|||||||||||||
|
|
a(1 e2 ) |
|
|
|
|
|
a |
|
|
|
|
|
|
|
R |
|
|
h, |
R |
|
|
|
|
|
h, - |
радиусы кривизны |
||||
|
(1 e2 sin 2 )3 / 2 |
|
|
(1 e2 sin 2 |
)1/ 2 |
||||||||||
эллипсоида Красовского: |
e2 |
0,0066934 , |
a 6378245 |
м. |
|
|
|||||||||
|
Задача преобразования |
|
кажущихся ускорений |
в |
бесплатформенном |
||||||||||
гироинклинометре в режиме БИНС формулируется как задача нахождения
проекций nN , nE , nh вектора |
|
на оси географического трехгранника по |
||||
n |
||||||
информации |
об измеренных |
акселерометрами |
составляющих nх0, ny 0, nz 0 |
|||
|
|
|
|
|
|
o x0 y0 z0 и по |
вектора n в осях связанного с |
корпусом СП трехгранника |
|||||
вычисленной |
матрице |
C 0 |
, |
определяющей |
взаимную |
ориентацию |
|
|
h |
|
|
|
|
трехгранников oNEh и
В блоке выработки параметров поступательного движения осуществляется вычисление составляющих линейной скорости и координат
места путем интегрирования составляющих nN , nE , nh .
Исходя из выражения (15) могут быть получены кинематические уравнения углового движения бесплатформенного инклинометра в углах
Эйлера:
N sin A E cos A x0 sin y0 cos ,
Asin h sin cos N cos A E sin A x0 cos y0 sin , |
(17) |
sin N cos A E sin A z 0 sin cos y0 sin x0 cos .
71
Из (15) можно получить соотношения, связывающие угловые скорости
вращения трехгранника o x0 y0 z0 с угловыми скоростями вращения географического трехгранника oNEh и скоростями изменения углов азимута
A , зенитного угла и угла поворота : |
||
|
|
|
x0 |
sin h A sin cos N sin A sin cos A cos cos |
|
|
|
|
y0 |
E cos A sin sin A cos cos , |
|
cos h A sin sin N sin A cos cos A cos sin (18) |
||
|
|
|
E cos A cos sin A cos sin ,
z0 h A cos sin N cos A E sin A .
Для автокомпенсации инструментальных погрешностей чувствительных элементов в гироинклинометре могут быть предусмотрены модуляционные развороты измерительного блока (ИБ), включающего блок акселерометров и блок гироскопов, вокруг продольной оси СП в диапазоне 180 . Тогда
положение связанной |
с ИБ системы координат |
o xb yb zb |
относительно |
|||||||||||
|
|
|
|
|
|
|
|
|
cos |
sin |
0 |
|
|
|
трехгранника |
o x |
|
y |
|
z |
|
характеризуется матрицей C b sin |
cos |
0 |
, где |
|
|||
|
|
0 |
|
0 |
|
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- текущее значение угла разворота вокруг продольной оси СП, которое вычисляется с помощью датчика угла (ДУ), расположенного на этой оси.
Матрица направляющих косинусов Coh , определяющая ориентацию географического трехгранника oNEh (h) относительно трехгранника
(o), вычисляется как:
|
c11 |
c12 |
c13 |
|
|
|
|
|
|||
h |
|
|
|
|
|
|
|
h |
b |
|
|
C0 |
c21 |
c22 |
c23 |
|
Cb |
Co |
, |
(19) |
|||
|
c |
31 |
c |
32 |
c |
33 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где Cob - матрица направляющих косинусов, определяющая системы координат o xb yb zb (b) относительно o x0 y0 z0 (o).

Вычисление азимутального, зенитного углов A , и угла может быть
осуществлено по вычисленным элементам матрицы направляющих |
|||||||||||||||||||||
косинусов Ch . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
A arctg |
|
c |
23 |
|
|
1 (c )2 |
arctg |
|
d |
32 |
|
|
||||||||
|
|
|
, arctg |
|
|
33 |
|
, |
|
|
. |
(20) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
c13 |
|
|
c33 |
|
|
|
|
|
|
d 31 |
|
||||||
|
Модель погрешностей определения азимута в трехосной схеме |
||||||||||||||||||||
|
|
|
|
|
|
|
гироинклинометра в режиме БИНС |
|
|||||||||||||
|
Матрицы Ch , Cb , C h определяются в БИНС с погрешностями, т. е. могут |
||||||||||||||||||||
|
|
|
|
|
b o |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
быть определены лишь некоторые оценки C h , C b , |
C h этих матриц, причем |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
o |
|
0 |
|
|||
|
C h C h |
, |
|
|
|
|
|
Ch Ch , |
|
|
|
|
|
(21) |
|||||||
C h |
Cb Cb Cb , |
Ch |
|
|
|
|
|
||||||||||||||
o |
o |
o |
|
|
|
o |
o |
|
o |
b |
|
|
|
b |
b |
|
|
|
|
|
|
где |
C h , C b |
, C h |
- |
матрицы, |
элементы |
|
которых |
определяются |
|||||||||||||
|
|
b |
o |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
варьированием соответствующих матриц Ch |
, Cb |
, C h . |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
o |
|
|
|
0 |
|
|
Подставляя соотношения (21) в алгоритм (19) и, при этом не учитывая
величин второго порядка малости относительно рассматриваемых переменных, получим следующее уравнение:
C h C h C b C h |
C b |
(22) |
||||||||
|
0 |
|
|
b o |
|
|
b |
|
o |
|
Умножая левую и правую части равенства (21) на матрицу C 0 |
, получим |
|||||||||
|
|
|
|
|
|
|
|
|
h |
|
следующее выражение для кососимметрической матрицы погрешностей: |
||||||||||
Ch |
Ch |
Ch Cb |
Cb , |
(23) |
||||||
|
0 |
|
b |
b |
0 |
|
|
h |
|
|
и соответствующему ей вектору погрешностей: |
|
|||||||||
|
|
|
|
C h |
|
|
|
|
|
(24) |
|
0h |
|
bh |
|
0b |
, |
|
|||
|
|
b |
|
|
|
|
||||
которые характеризуют суммарные погрешности гироинклинометра в построении географической системы координат относительно осей корпуса СП.
Составляющие веторов в выражении (24) имеют вид:
0h
sin A cos Asin
cos A sin Asin ,A cos
|
|
|
, |
|
0 |
|
(25) |
|
|
|
0 |
, |
|||
|
|
|
|
|
|
|
|
|
bh |
|
|
0b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
73
Если считать, что ДУ измеряет угол без ошибок (т.е. =0) и
представить векторное уравнение (24) в скалярной форме, то получим уже известные кинематические соотношения (12) и (13) для погрешностей в выработке параметров ориентации.
Воспользовавшись выводом модели погрешнстей БИНС на ДУС,
приведенным в , можно получить уже известное кинематическое уравнение,
в котором «дрейф восточного гироскопа» E в бесплатформенном гироинклинометре определяется выражением (11).
74
Лекция № 8
Двухосные гироинклинометры. Режим точечного компасирования в
продольной схеме гироинклинометра: алгоритмы, погрешности
Применение бесплатформенной инклинометрической системы,
построенной на одном двухосном ДУС c расположением вектора кинетического момента по оси скважины (продольная схема) - наиболее естественное решение в условиях малого диаметра скважин.
Вычисление азимута скважины при использовании продольной схемы с
одним двухосным ДУС, измеряющим только две составляющие x0 , y 0
угловой скорости вращения Земли, традиционно производится так же, как и в трехосной схеме, т.е. с помощью функцию arctg :
A arctg |
y cos |
(1) |
|
|
|
||
x sin sin |
|||
где: y x0 sin y0 cos , x x0 |
cos y0 sin |
||
в основе которой лежат следующие выражения, вытекающие из первых двух соотношений в (1) лекции №9:
sin A |
y |
(2) |
|||
|
|
|
|||
cos |
|||||
|
|
||||
cos A |
x |
sin sin |
(3) |
||
cos cos |
|||||
|
|
||||
Для погрешности определения азимута нетрудно получить:
A |
x sin A y cos cos A |
|
|
||
|
|
|
(4) |
||
|
cos cos |
||||
|
|
|
|||
(cos tg sin cos A sin 2 A sin tg ) sin A(tg cos A tg ), |
|
||||
где: y |
x 0 sin y 0 |
cos , x x 0 cos y 0 sin |
|
||
Первое слагаемое уравнения (4) определяет «гироскопическую» составляющую ошибки определения азимута, выражение для которой подтверждает известное положение о неработоспособности продольной схемы гироинклинометра при приближении зенитного угла к 90 .
Второе и третье слагаемые уравнения (4) определяют составляющую
75
ошибки азимута, обусловленную погрешностями акселерометров. «Акселерометрическая» составляющая A в (4) содержит члены, которые пропорциональны tg и при значении 90 , также как и «гироскопическая» составляющая (4), стремятся к бесконечности. Таким образом, даже при идеальном гироскопе погрешность вычисления азимута по алгоритму (1) в
продольной схеме будет расти с увеличением угла из-за погрешностей акселерометров.
Сегодняшнее применение продольной схемы в режиме точечного компасирования ограничено зенитными углами - 60 -75 .
76
Лекция № 9
Продольная схема гироинклинометра: измерение угловых параметров наклонно-направленных и горизонтальных скважин,
особенности построения траекторий скважин.
Если в качестве источника информации об азимуте A рассматривать только выражение (2) (см. лекцию №8), то можно получить следующий
алгоритм его вычисления:
A arcsin |
y |
|
|
|
(5) |
|||
|
|
|
|
|
|
|||
cos |
|
|
|
|||||
Варьируя (5), получим: |
|
|||||||
|
|
y |
1 |
|
|
|||
A |
|
|
(cos tg sin |
|
) |
(6) |
||
cos cos A |
cos A |
|||||||
Как видим, в отличие от (4) «гироскопическая» составляющая ошибки вычисления азимута (5) вообще не зависит от значений зенитного угла, а ее
«акселерометрическая» составляющая свободна от зависимости от tg .
Таким образом, ошибки определения азимута (1) и (5) обладают разными свойствами. Пользуясь этими соотношениями и при этом, учитывая только составляющие, обусловленные погрешностями ДУС, можно определить условие, при котором для вычисления азимута предпочтительней
пользоваться алгоритмом (5).
Значения ошибки азимута A, полученные из выражения (4) и (6)
обозначим соответственно At |
и As . |
|
|||||||||||||||||
Проверяя условия выполнения неравенства: |
|
||||||||||||||||||
|
|
|
A |
|
|
|
|
A |
|
|
At |
|
1, |
|
|||||
|
|
|
|
|
< |
|
|
или |
|
(7) |
|||||||||
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
t |
|
|
|
|
|
s |
|
|
|
|
As |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|||
получим: |
|
cos2 |
A |
|
sin Acos A |
|
1, и, далее, используя |
свойство |
|||||||||||
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||
x |
cos |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
транзитивности и известное соотношение модуля суммы и суммы модулей,
77
получим: cos2 A |
|
y |
|
sin Acos A |
|
|
1. Теперь |
условие, при котором |
||||||||||||||||||||||||
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
x |
|
|
|
cos |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
cos A |
|
|
|
|
|
|||
выполняется A A , будет иметь вид: |
|
|
|
|
|
|
|
sin A |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
t |
|
s |
|
|
|
|
|
|
x |
|
|
|
cos |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
И, наконец, рассматривая (7) применительно к максимально допустимой |
||||||||||||||||||||||||||||||
ошибке |
|
и |
принимая |
|
условие |
равноточности погрешностей ДУС |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
( |
|
x |
|
max |
|
y |
|
|
max ), |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
получим: |
|
|
tgA |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
(8) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
cos |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
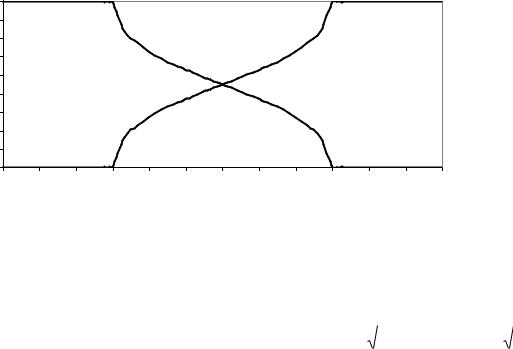
Таким образом, при выполнении условия (8) следует пользоваться для вычисления A алгоритмом (1), в противном случае ─ алгоритмом (5).
Области предпочтительного использования обоих алгоритмов вычисления угла A наглядно иллюстрируются на картинной плоскости
(рис.1). Очевидно, что суммарно эти области гораздо шире, чем области использования традиционного алгоритма, что делает перспективным применение комбинированного алгоритма, предполагающего переключение с одного алгоритма на другой.
, град |
|
|
|
|
|
|
|
|
|
|
|
|
180 |
|
|
|
|
|
|
|
|
|
|
|
|
160 |
|
|
|
|
Область |
|
|
|
|
|
|
|
|
|
|
|
использования |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
140 |
|
|
|
|
"полного" |
|
|
|
|
|
|
|
120 |
|
|
|
|
алгоритма |
|
|
|
|
|
|
|
|
Область |
|
|
|
|
|
|
|
Область |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
100 |
|
использования |
|
|
|
|
|
|
использования |
|
||
80 |
|
"усеченного" |
|
|
|
|
|
|
"усеченного" |
|
||
|
алгоритма |
|
|
|
|
|
|
алгоритма |
|
|||
|
|
|
|
|
|
|
|
|
||||
60 |
|
|
|
|
|
Область |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
использования |
|
|
|
|
|
|
40 |
|
|
|
|
|
"полного " |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
алгоритма |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
15 |
30 |
45 |
60 |
75 |
90 |
105 |
120 |
135 |
150 |
165 |
180 |
|
|
|
A, град |
|
|
|
|
Рис.1 |
|
|
|
|
|
|
|
В то же время при значении зенитного угла = |
90 азимут можно |
|
|
||||
вычислить только в соответствии с алгоритмом (5). |
|
|
|
|
|
|
|
Анализ показал, что при пересечении траекторией |
скважины |
зоны, |
|||||
граничные значения азимутов которой равны 90 (270 ) |
|
|
, 90 (270 ) |
|
|
|
|
2 |
y |
|
2 |
y |
|||
|
|
|
|
|
|
||
78
(где |
y |
y |
|
), приборное |
значение |
Ac |
перестает меняться. |
|||
cos |
|
|||||||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
||||
Гироинклинометр |
оказывается в |
«мертвой |
зоне» |
протяженностью 2 2 y |
||||||
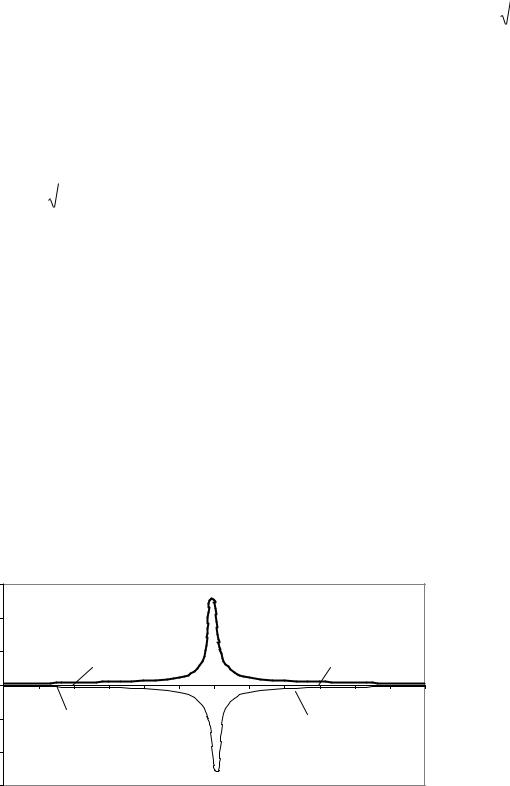
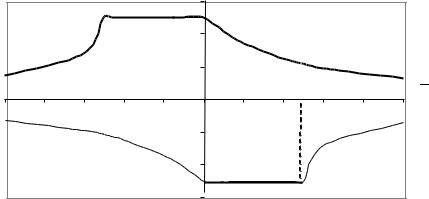
(рис.2, рис.3). Такую же величину имеет диапазон возможных значений,
принимаемых Ac (рис.2, рис.3). При попадании в этот «квадрат» и нахождении в нем сверх той протяженности проходки, которая обеспечивает выполнение критерия гладкости:
|
dA |
(l l |
|
) 2 |
|
|
|
|
|
|
|
|
0 |
2 |
y |
, |
|
|
(9) |
||||
|
dl |
|
|||||||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||
где: |
dA |
─ допустимое искривление скважины ( |
|
); |
(l l0 ) ─ протяженность |
||||||
|
|||||||||||
dl |
м |
||||||||||
|
|
|
|
|
|
|
|
|
|||
проходки на рассматриваемом интервале,
теряется возможность измерения угловых параметров скважины. При выполнении условия (9) выбор между значениями Ac и (180 - Ac )
(«определение четверти») неоднозначен - выход азимута из «мертвой зоны» становится неконтролируемым, а дальнейшая траектория скважины – ненаблюдаемой и приходится констатировать невозможность решения задач проводки или контроля скважины гироинклинометром в режиме точечного компасирования.
A (град) |
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
при значении |
|
|
|
|
при значении 0 |
|
|
||||
|
|
|
|
|
|
|
||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
A,град |
0 |
15 |
30 |
45 |
60 |
75 |
90 |
105 |
120 |
135 |
150 |
165 |
180 град |
-1 |
при значении 0 |
|
|
|
|
при значении 0 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||
-2 |
|
|
|
|
|
|
|
|
|
|
|
|
-3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2 |
|
|
|
|
|
|
79
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
(град) |
|
-5 |
-4 |
-3 |
-2 |
-1 |
1 |
2 |
3 |
4 |
5 |
|
|
|
|
|
|
-1 |
|
|
|
|
|
|
|
|
|
|
-2 |
|
|
|
|
|
|
|
|
|
|
-3 |
|
|
|
|
|
Рис.3
Таким образом, подводя итог всему вышесказанному, можно сделать
следующие выводы:
1. Для измерения угловых параметров скважин произвольной ориентации с помощью продольной схемы в режиме точечного компасирования следует пользоваться комбинированным, т. е. меняющимся в зависимости от углов ориентации ( A , ) алгоритмом ( arcsin или arctg ), при
этом условием «перехода» с |
одного алгоритма на другой является |
|||
|
cos tgA |
|
1. Следует отметить, |
что область применения алгоритма arcsin |
|
|
|||
|
|
|
|
|
гораздо шире, чем arctg , а для горизонтальной скважины с зенитным углом
= 90 этот алгоритм является единственным, позволяющим вычислить ее азимут.
2.Анализ погрешностей компасирования участков скважин, лежащих в плоскости горизонта и приближающихся к линии «восток - запад» показывает, что и в этом случае сопровождение бурения скважины одногироскопным скважинным прибором возможно, а его погрешности ограничены. Однако, при достаточной протяженности такого участка может произойти потеря наблюдаемости его траектории и, в силу этого, дальнейшая невозможность проводки любого другого горизонтального участка.
80