

СТАТИКА
.pdf2.МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ЦЕНТРА
ИОСИ
Рассмотрим некоторое тело, на которое действует сила F, приложенная в точке А.
Мо мент о м с илы F от но сит ел ьно ц ент р а О н а з ыв а е т с я в е к то р н о е п р о и з в е де н и е р а ди у с - в е к то р а то ч к и п р и л о ж е н и я с и - л ы н а с и л у :
|
|
|
|
|
|
|
|
|
|
o F |
rA F. |
(2.1) |
|||
m |
|||||||
Момент силы относительно центра |
|
||||||
есть вектор, перпендикулярный плоско- |
|
||||||
сти моментного треугольника и по мо- |
|
||||||
дулю равный произведению модуля силы |
|
||||||
на плечо, где плечо h есть расстояние |
|
||||||
от центра до линии действия силы. Этот |
|
||||||
вектор направлен в ту сторону, откуда |
|
||||||
поворот, совершаемый телом под дей- |
|
||||||
ствием силы, виден происходящим про- |
|
||||||
тив часовой стрелки.
mO F O, F . |
Рис. 2.1 |
|
mO F F h 2 SOAB .
Треугольник ОАВ (рис. 2.1) называется м о м е н т н ым тре у г о л ь н и к о м . Размерность момента силы:
|
|
|
|
|
|
|
Н м СИ, |
|
m |
F |
|
||||
|
O |
|
кгс м ТС. |
||||
|
|
|
|
|
|
|
|
Если точка О тела закреплена, то момент силы можно рассматривать как меру вращательного действия силы относительно этого центра.
10
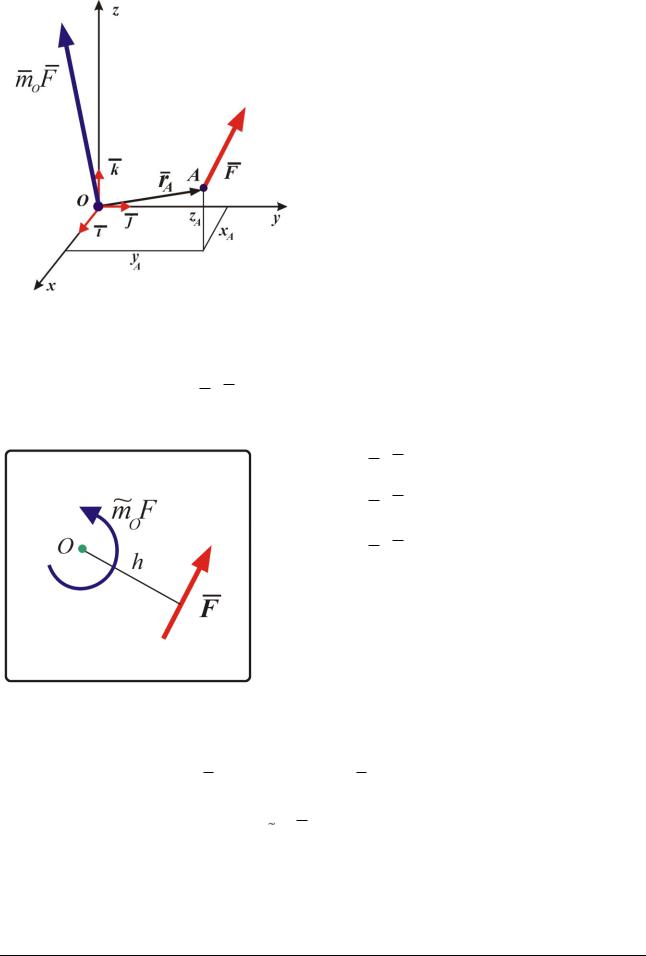
В декартовых координатах с началом в центре О можно записать:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
i |
|
j |
|
||||||
|
|
|
|
|
|
k |
|
||||||
|
|
|
|
|
|
|
|
|
|
||||
|
m |
O F xA |
yA |
zA |
|
||||||||
|
|
|
|
F |
F |
F |
|
||||||
|
|
|
|
|
x |
|
y |
|
z |
|
|||
|
|
|
yAFz zAFy |
|
zAFx xAFz |
||||||||
|
i |
j |
|||||||||||
|
|
|
|
|
|
|
xAFy yAFx . |
||||||
|
|
|
k |
||||||||||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
где i , j , k - орты координатных |
||||||||||
Рис. 2.2 |
осей. Fx, Fy, Fz проекции силы на оси |
||||||||||||
|
координат. x, y, z координаты точки |
||||||||||||
приложения силы. |
|
|
|
|
|
|
|
|
|
|
|
|
|
Проекции вектора mo F на оси с началом в центре O равны алгебраическим дополнением элементов первой строки определителя (2.1):
mo F x
mo F y
mo F z
yAFz zAFy ;
zAFx xAFz ;
xAFy yAFx .
|
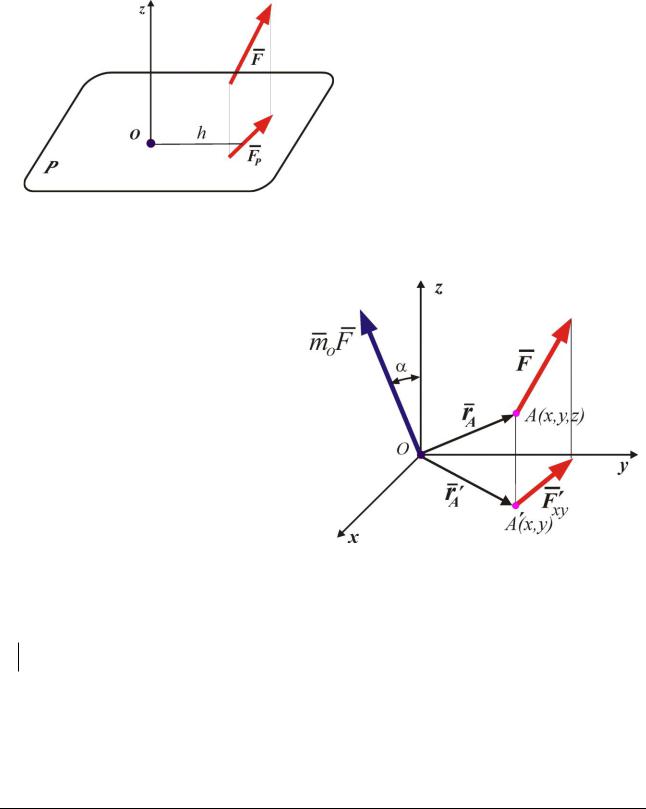
В плоскости, проходящей через силу и |
|
данный центр, момент силы можно рассмат- |
|
ривать как величину алгебраическую и изоб- |
|
ражать кривой стрелкой. |
Рис. 2.3 |
А лг ебр а и че ск им м о ме нт о м си лы |
|
от но сит ел ьно ц ент р а н а з ыв а е тс я |
в з я то е с о з н а к ом + и л и п р о и з в е де н и е м о ду л я с и л ы н а п л е ч о :
mz F FPhp mz F 2SOA1B1 .
mO F F h .
Знак +, если сила стремится вращать тело против часовой стрелки
(рис.2.3).
11
Моментом силы относительно оси называется алгебраический момент проекции силы на плоскость перпендикулярную оси относительно точки пересечения оси с плоскостью (рис. 2.4).
|
|
|
|
|
|
||
mz F |
mO FP FPhp |
mz F 2 SOA B . |
|||||
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
Если тело может вращаться |
||
|
|
|
вокруг данной оси, то момент |
||||
|
|
|
силы |
можно |
рассматривать как |
||
|
|
|
меру |
вращательного действия |
|||
|
|
|
силы относительно этой оси. |
||||
|
|
|
|
|
Знак момента силы относи- |
||
|
|
|
тельно оси принято считать по- |
||||
|
|
|
ложительным, когда сила стре- |
||||
|
|
|
мится повернуть тело против ча- |
||||
|
Рис. 2.4 |
совой стрелки, если смотреть с |
|||||
конца оси.
Т ЕО РЕ МА о связи между моментом силы относительно центра и оси проходящей через этот центр
Момент силы относительно оси равен проекции на эту ось момента силы относительно какоголибо центра на данной оси:
|
|
|
|
O F |
. (2.2) |
mz F |
|
||||
m |
|||||
|
|
|
|
z |
|
Д о к а за те ль с т во :
По определению для модулей |
Рис. 2.5 |
|
|
имеем: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
j |
k |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
x |
F y |
F |
|
|
|
|
|
|
|
|
|
m |
F |
|
|
|
m |
F |
|
r |
F |
|
A |
y |
A |
0 |
|
m |
F |
|
. |
||||||||||||||||||
z |
|
|
|
|
|
|
O xy |
|
A' |
|
xy |
|
|
|
|
|
|
|
|
|
A y |
A x |
|
|
|
O |
z |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
F |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Легко проверить также совпадение знаков. Таким образом, выражение (2.2) справедливо. Теперь можем записать:
12
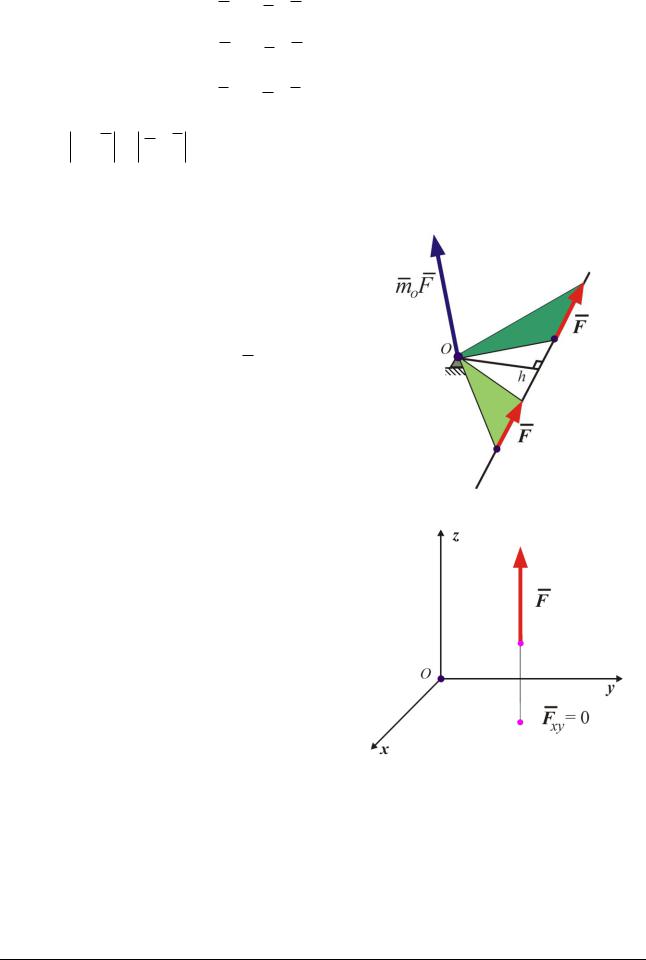
mx F mO F x yAFz zAFy ; my F mO F y zAFx xAFz ; mz F mO F z xAFy yAFx .
а также mz F mO F cos , где угол между осью и вектором момента си-
лы.
Примечания:
1. Момент силы не изменится, если силу перенести вдоль линии ее действия.
В самом деле, из определения момента силы относительно центра следу-
ет что при переносе силы F не изменится ни произведение F h, ни направ-
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ление вектора |
|
|
O F , а т.к. |
|
|||||||||
m |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
||||
mz F |
|
O F |
|
|
|
||||||||
m |
z |
то не изменится и мо- |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
мент силы относительно оси. (Рис. 2.6). |
Рис. 2.6 |
||||||||||||
2. Если сила параллельна оси, то момент силы относительно этой оси равен нулю.
В самом деле, в этом случае проекция силы на плоскость перпендикулярную оси обращается в нуль.
Рис. 2.7
13
3. Если сила пересекает ось, то ее момент относительно этой оси равен нулю.
В самом деле, проекция силы на плоскость оси проходит через точку пересечения оси с плоскостью и момент ее относительно данной точки равен нулю
Рис. 2.8
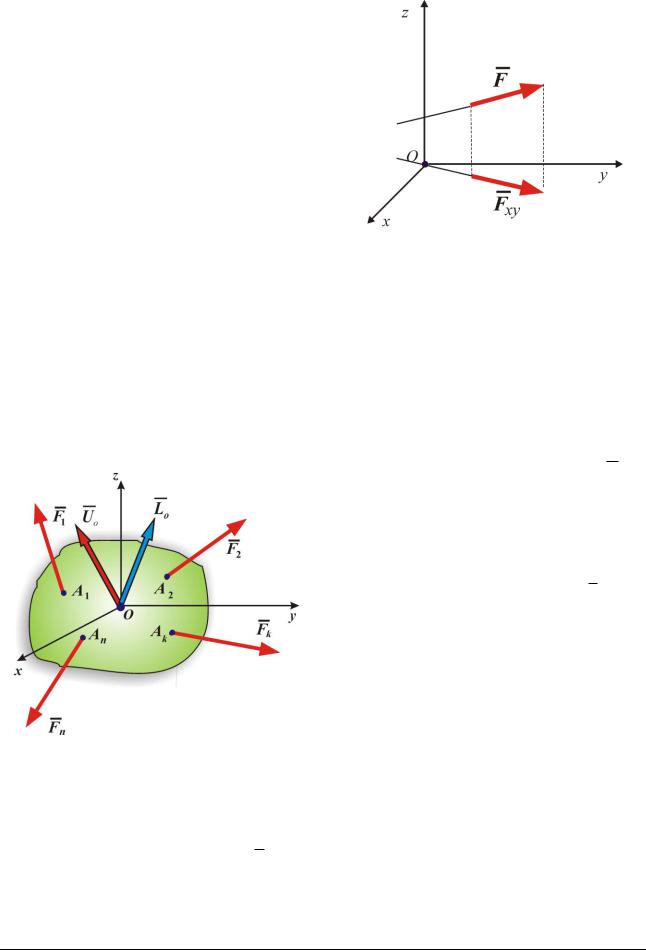
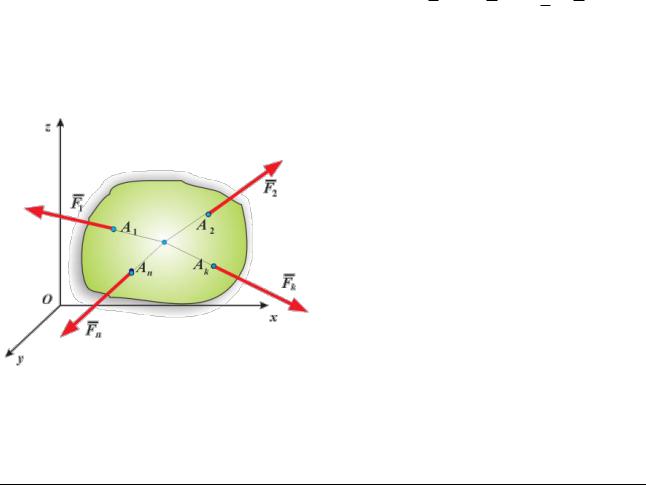
3. ГЛАВНЫЙ ВЕКТОР И ГЛАВНЫЙ МОМЕНТ СИСТЕМЫ СИЛ
Пусть дана система сил |
|
Fk n , |
приложенных в точках Ak n |
некото- |
|
рой механической системы, и пусть О - произвольная точка пространства.
Г лав ным в е ктором UO си-
стемы сил называется вектор, приложенный в точке О, и равный сумме векторов сил системы:
|
|
|
n |
|
|
|
U |
O Fk . |
|||
Рис. 3.1 |
|
|
k 1 |
||
|
|
|
|
|
|
Геометрически главный вектор определяется замыкающей стороной силового многоугольника, (векторного многоугольника, построенного на силах, как на сторонах).
Г лав ным момен том LO системы сил относительно центра O назы-
вается вектор, приложенный в точке О и равный сумме моментов сил системы относительно этого центра:
14

n
LO mO Fk .
k 1
Главный вектор и главный момент системы сил являются характеристиками действия системы сил на тело. В дальнейшем будет показано, что результат действия системы сил на МС вполне определяется главным вектором и главным моментом системы сил относительно центра.
Точка О, в которой приложены главный вектор и главный момент системы сил, назовем п о л ю с о м .
Из определения главного вектора и главного момента системы сил относительно центра следует, что:
1. Главный вектор и главный момент системы сил не изменятся, если точки приложения сил системы перенести вдоль линий их действия.
2. Главный вектор и главный момент системы сил
Fk n Qk m Sk r
найдутся как: |
|
UO F UO Q UO S ; |
LO F LO Q LO S . |
Проецируя выражения для главного вектора и главного момента на оси координат, получим:
n |
n |
n |
||||||
UO x Fkx ; |
UO y Fky ; |
UO z Fkz . |
||||||
k 1 |
k 1 |
k 1 |
||||||
n |
|
|
n |
|
|
n |
|
|
LO x mx Fk ; |
LO y my Fk ; |
LO z mz Fk . |
||||||
k 1 |
k 1 |
k 1 |
||||||
Здесь UO x , UO y , UO z - |
проекции главного вектора на оси координат; |
|||||||
LO x , LO y , LO z - проекции главного момента на оси координат, или главные
моменты системы сил относительно координатных осей.
Главный момент системы сил относительно оси равен проекций на эту ось главного момента относительно какой-либо точки на оси.
15
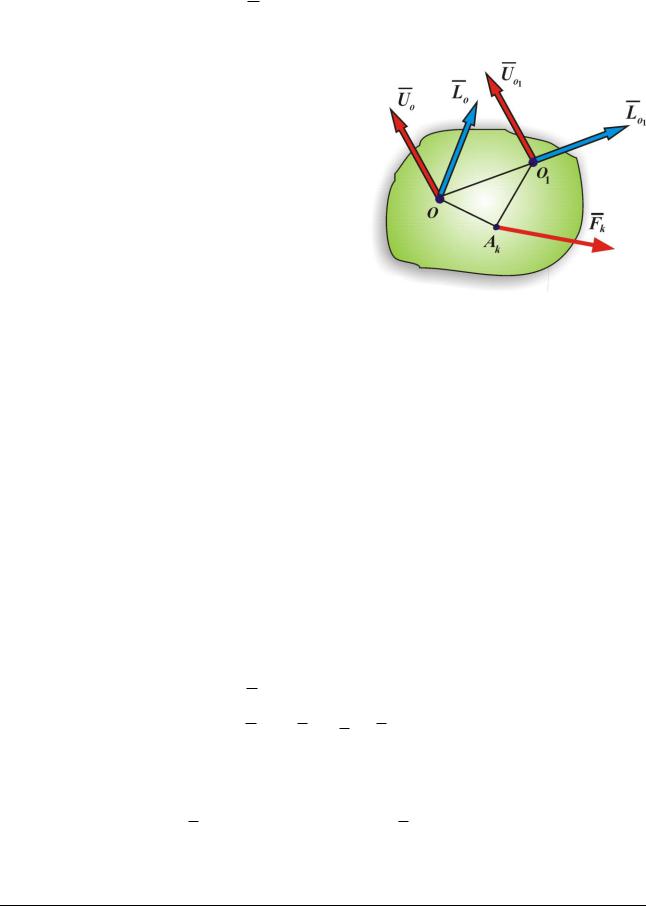
ТЕОРЕМА об изменении главного вектора и главного момента с изменением полюса
Пусть дана система сил Fk n , приложенных в точках Ak n некоторой ме-
ханической системы, и пусть О - полюс.
|
|
|
|
n |
|
|
|
|||||
U |
O Fk - |
главный вектор систе- |
||||||||||
|
|
|
|
k 1 |
|
|||||||
мы сил; |
|
|||||||||||
|
|
|
|
n |
|
|||||||
|
|
O |
|
|
|
|
|
|||||
L |
O Fk |
- главный момент си- |
||||||||||
|
m |
|||||||||||
|
|
|
|
k 1 |
|
|||||||
стемы сил. |
|
|||||||||||
Найдем главный вектор и главный |
||||||||||||
моменты системы сил относительно ново- |
||||||||||||
го центра О1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.2 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
U |
O1 Fk UO . |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k 1 |
||||||||||||||||||||||||
|
|
|
n |
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
n |
||||||||||||||||||||
|
|
O1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
L |
O1 Fk O1 Ak F k (O1 O O Ak ) F k |
|||||||||||||||||||||||||||||||||||||||||
|
m |
|||||||||||||||||||||||||||||||||||||||||
|
|
|
k 1 |
|
|
|
|
|
k 1 |
|
|
|
|
|
|
|
|
|
k 1 |
|||||||||||||||||||||||
|
|
n |
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
n |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
O1 O |
Fk OAk Fk O1 O Fk LO O1 O UO LO . |
|||||||||||||||||||||||||||||||||||||||||
|
|
k 1 |
|
|
|
|
|
k 1 |
|
|
|
|
|
|
|
|
|
|
|
k 1 |
||||||||||||||||||||||
Итак, можем сформулировать теорему:
-Главный вектор не зависит от выбора полюса.
-Главный момент системы сил относительно нового полюса равен главному моменту системы сил относительно старого полюса, сложенному с моментом главного вектора сил системы в старом полюсе относительно нового.
UO idem O; LO1 LO mO1UO .
Следствие: Если главный вектор системы сил равен нулю, то главный
момент одинаков для любого полюса |
|
LC idem C, |
если UC O . |
16
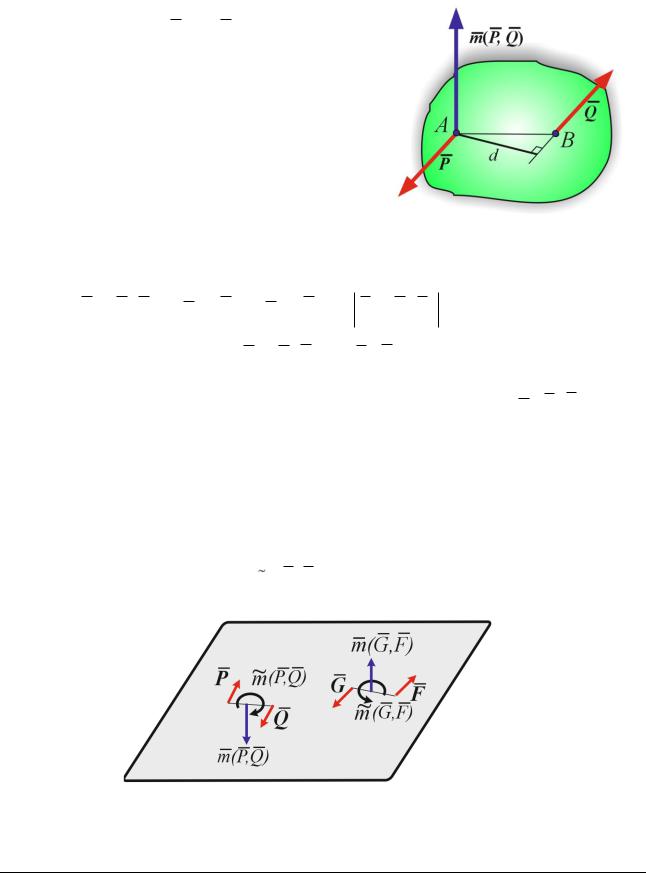
4 ПАРА СИЛ
Парой сил называются две равные по модулю, параллельные и противоположные по направлению силы, приложен-
ные к данному телу P Q .
Расстояние между линиями сил пары |
|
|
называется пле чо м па р ы . Плоскость, про- |
|
|
ходящая через линии действия сил пары, |
|
|
называется п ло с кост ью па р ы . |
|
|
Главный вектор пары сил равен нулю, |
|
|
следовательно, главный момент пары сил |
|
|
одинаков для любого полюса. |
Рис. 4.1 |
|
В частности, если за полюс взять точку |
||
|
||
приложения одной из сил пары, то получим: |
|
LA P,Q mA P mA Q LA P,Q Q d P d ,
LA P,Q P, Q .
Эта величина называется мо м ент пар ы и обозначается m P,Q .
Момент пары сил - вектор, перпендикулярный плоскости пары, направленный в ту сторону, откуда вращение тела парой видно против часовой стрелки, и по модулю равный произведению одной из сил пары на плечо.
Для плоской системы сил моменты пар отличаются лишь знаком и модулем, поэтому их можно рассматривать как величины алгебраические:
m P,Q Pd Qd
Рис. 4.2
17

5 АКСИОМА РАВНОВЕСИЯ СВОБОДНОГО ТВЕРДОГО ТЕЛА
Все результаты статики свободного твёрдого тела можно получить на основании только одной аксиомы равновесия.
Для равновесия системы сил {Fk}n, приложенных к свободному твердому телу, необходимо и достаточно, чтобы главный вектор и главный момент сил системы относительно какого либо центра были равны нулю.
Fk n ~ 0 U |
O 0, |
|
O 0.. |
|
L |
(5.1) |
Это выражение можно записать иначе:
|
|
|
|
n |
|
n |
|
|
|
||
Fk |
|
~ 0 Fk 0, |
|
O Fk . |
(5.2) |
||||||
n |
m |
||||||||||
|
|
|
k 1 |
|
k 1 |
|
|||||
|
|
|
|
|
|
||||||
Для равновесия системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы суммы векторов сил и их моментов относительно какоголибо центра были порознь равны нулю.
Замечание: На основании теоремы об изменении главного вектора и главного момента можно утверждать, что если главный вектор и главный момент равны нулю относительно какого-либо центра, то они будут равны нулю и относительно любого другого центра.
УСЛОВИЯ РАВНОВЕСИЯ РАЗЛИЧНЫХ СИСТЕМ СИЛ В АНАЛИТИЧЕСКОЙ ФОРМЕ
а. Уравнения (5.2) представляют собой условия равновесия произвольной системы сил в векторной форме. Проецируя их на оси координат, получим:
18
|
|
|
|
n |
n |
|
|
|
||
|
|
|
|
Fkx 0; |
mx Fk =0; |
|
||||
|
|
|
|
k 1 |
k 1 |
|
||||
|
|
|
|
n |
n |
|
||||
|
|
|
|
|
|
|
|
|
|
|
Fk |
|
my Fk =0; |
|
|||||||
n |
Fky 0; |
(5.3) |
||||||||
|
|
|
k 1 |
k 1 |
|
|||||
|
|
|
|
|
||||||
|
|
|
|
n |
n |
|
||||
|
|
|
|
Fkz 0; |
|
|
|
|
||
|
|
|
|
mz Fk 0. |
|
|||||
|
|
|
|
|
k 1 |
|
||||
|
|
|
|
k 1 |
|
|||||
Это условия равновесия произвольной системы сил в координатной форме
Для равновесия произвольной системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы суммы проекций этих сил на три координатные оси и суммы их моментов относительно к о о р ди н а тн ых о с е й б ы - л и п о р о з н ь р а в н ы н у л ю
Координатные оси для первых трех уравнений (5.3) и последующих трех уравнений могут быть разными, т.к. UO и LO можно проецировать на разные оси.
б. Система сходящихся сил. Если силы системы пересекаются в некоторой точке О, то LO 0. Если же при этом UO = 0, то LO1 = LO + mO1UO 0 , т.е. уравнения моментов сил становятся бесполезными, т.к. они будут следствием первых трех уравнений.
Рис. 5.1
координатные оси равны нулю
|
|
|
|
n |
|
|
|
|
Fkx 0; |
|
|
|
|
k 1 |
|
|
|
|
n |
|
|
сход. |
|
|
|
|
|||
Fk |
n |
Fky 0; (5.4) |
||
|
|
|
k 1 |
|
|
|
|
|
|
n
Fkz 0.k 1
Для равновесия сходящейся системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы суммы проекций этих сил на три
19