

Голобородько Е.И. Электрические машины
.pdfпротекающие по трем катушкам, расположенным в пространстве под углом 120° друг к другу.
y |
i |
|
|
|
|
iax |
iby |
icz |
iax |
|
|
a |
c |
|
|
|
|
Х |
|
|
|
|
|
|
|
|
|
|
|
Х |
|
|
|
|
|
Вb |
|
|
|
t |
t |
|
|
|
|
|
|
|
x |
|
|
|
|
 z
z
b cВ
Вa |
Х |
Рис. 3.3. Индукция магнитного поля, трех катушек, по которым протекает трёхфазный ток для t = 0
Представим себе такую картину (рис.3.3). Имеем три катушки, плоскости которых расположены перпендикулярно листу, так что мы видим их с ребра. Один край каждой катушки, где ток течет от нас при положительном его значении, пометим крестиком, другой, где ток течет к нам, жирной точкой. Эти катушки, как это принято в теории трехфазных токов, назовем «а-х», «b-y» и «с-z». Как видим, катушка «b-y» расположена вертикально. При положительном значении тока в ней создавалось бы магнитное поле, вектор магнитной индукции которого был бы направлен вправо, однако в начальный момент ток ib в этой катушке отрицательный и, стало быть, вектор магнитной индукции Вb окажется сориентированным влево. Используя аналогичные рассуждения, определим направление вектора Bc магнитной индукции, созданной током в катушке «c-z». Ток в катушке «b-y» положительный и больше по модулю, чем остальные, поэтому и вектор Ba , изображенный на рисунке 3.3, длиннее остальных. Для того чтобы легче было определить его направление по правилу буравчика (или по правилу правого винта), рядом с ним показан винт, направление поступательного движения которого показывает направление вектора Ba , если его шляпку, расположенную параллельно плоскости витков катушки, вращать в ту сторону, куда течет ток в катушке. Как можно видеть, он течет к нам в нижней правой стороне,
31
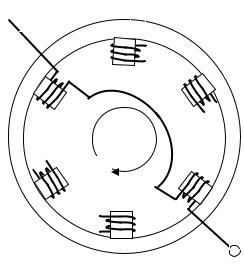
помеченной рядом буквой «х», и от нас в верхней левой, помеченной буквой «а». Понятно, что сумма этих трех векторов будет направлена так же как вектор Ba. Проследите теперь, какова будет картина через треть периода, когда максимальным станет ток в катушке «b-y». Вся картина развернется на 120° против часовой стрелки. При этом суммарный вектор магнитной индукции станет направлен, как самый большой к этому времени вектор Bb . Еще через треть периода вся картина повернется еще на 120°, и, таким образом, магнитное поле сделает полный оборот. Надо обратить внимание на то, что катушки, создающие магнитное поле, сами остаются неподвижными и ток к ним может быть подведен через неподвижные контакты. Так катушками с трехфазным током мы можем заменить вращающийся кольцевой магнит. Если теперь в пространство, охватываемое катушками, поместить постоянный магнит, получим простейший синхронный двигатель.
Если в полученном устройстве вращать магнит, то в катушках будет индуктироваться ЭДС, причем в одной катушке относительно другой она будет сдвинута по фазе на 120°. Так работает трехфазный синхронный генератор. Для усиления магнитного поля, создаваемого вращающейся деталью, на этот стержень наматывают провод и пропускают по нему постоянный ток. Полученная новая обмотка в данном случае называется обмоткой возбуждения, а ток в ней – током возбуждения. Строго говоря, ее надо бы называть обмоткой возбуждения магнитного поля, но это оказалось слишком длинно и с течением времени название сократилось.
В рассмотренном варианте магнитное поле делает один оборот за один период подведенного напряжения. При частоте промышленной сети f = 50 с-1

 А Z частота вращения магнитного поля оказывается равной
А Z частота вращения магнитного поля оказывается равной
B
Y
Х
C
Рис. 3.4. Статор машины, имеющий одну пару полюсов на
одну пару полюсов на фазу.
n0 = 50c−1 60c / мин = 3000мин−1 .
Представим себе, что обмотки мы наматывали не так, как показано на рисунке, на специально выделенных полюсах внутри статора (см. рис. 3.4). Все рассуждения применительно к этому новому рисунку остаются в силе. Заметим, что для обмоток на каждую фазу выделены два полюса, расположенные диаметрально противоположно. На рисунке показано пунктиром соединение обмоток только фазы А-Х. Так же надо соединить обмотки остальных фаз. Говорят, что такая конструкция имеет
32

Представим теперь, что мы разрезали статор |
А |
||
вдоль по линии, |
разделяющей полюса, |
||
Y |
|||
помеченные буквами А и Z, и разогнули цилиндр |
|||
|
|||
статора так, что он стал образовывать только |
|
||
половину цилиндра, как показано на рисунке 3.5. |
|
||
Понятно, что теперь за время одного периода |
|
||
вращающееся поле пробежит только половину |
|
||
окружности, и если к такому статору приложить |
|
||
справа вторую такую же половину, то |
Х |
||
вращающееся магнитное поле пройдет полный |
|
||
круг за два периода. Частота вращения |
|
||
магнитного поля уменьшится вдвое. Но тогда на |
Z |
||
полной окружности статора будет по две пары |
|||
полюсов на фазу, всего двенадцать полюсов, а не |
Рис. 3.5. Развернутая |
||
шесть, как на рисунке |
. Число пар полюсов на |
половинка статора с |
|
шестью полюсами |
|||
фазу принято обозначать буквой «р». В принципе |
|||
|
|||
число пар полюсов на фазу может быть любым. Частоту вращения магнитного поля теперь можно найти как n0 = 3000/р.
3.1.3. Асинхронный двигатель
Рассмотрим теперь силовое взаимодействие замкнутого контура с приближающимся или удаляющимся магнитом (рис. 3.6).
iинд 


 Финд
Финд 

Ф 
 i ни д
i ни д

V
Рис. 3.6. Ориентация силовых линий магнитного поля приближающегося магнита и магнитного поля, индуктированного увеличивающимся магнитным потоком, пронизывающим замкнутый контур
33

Пусть к контуру, ближняя сторона которого показана на рисунке 3.6 самой |
|||||||||||
жирной линией с самой большой стрелкой, направленной вниз, приближается |
|||||||||||
полосовой магнит, обращенный северным полюсом к контуру. Магнитный |
|||||||||||
поток Ф, пронизывающий контур, увеличивается. Положительное направление |
|||||||||||
обхода контура связано с потоком правилом буравчика или правого винта. То |
|||||||||||
есть, если расположить шляпку винта в плоскости контура, то положительным, |
|||||||||||
направлением будет считаться направление вращение винта при его |
|||||||||||
поступательном движении в сторону потока. В нашем случае это направление |
|||||||||||
совпадает с направлением движения часовой стрелки. ЭДС индукции, |
|||||||||||
рассчитываемая по закону электромагнитной индукции |
e = −dФ , |
оказывается |
|||||||||
|
|
|
|
|
|
|
dt |
|
|
|
|
отрицательной, то есть она направляет ток против положительного направления |
|||||||||||
обхода контура или как раз по направлению стрелки показанной на контуре. |
|||||||||||
В свою очередь направление магнитного потока, созданного этим током тоже |
|||||||||||
связано с током правилом правого винта, то есть при вращении в направлении |
|||||||||||
тока шляпки винта, расположенной в плоскости контура, его поступательное |
|||||||||||
движение показывает направление магнитного потока, созданного |
|||||||||||
индуктированным током. |
|
|
|
|
|
|
|
|
|
|
|
Как видим, магнитный поток, созданный индуктированным током |
|||||||||||
направлен вправо (силовые линии показаны пунктирными линиями). Значит, |
|||||||||||
справа от контура расположен северный полюс магнитного поля контура и |
|||||||||||
обращен он к северному полюсу приближающегося магнита. Как известно, |
|||||||||||
одноименные магнитные полюса отталкиваются. Поэтому контур будет |
|||||||||||
испытывать силу, действующую со стороны приближающегося магнита и |
|||||||||||
отталкивающую его от магнита. |
|
|
|
|
|
|
|
|
|
|
|
Ваша задача теперь проследить, что изменится, если магнит будет |
|||||||||||
двигаться не справа налево, а сверху вниз, а потом, если будет удаляться, а не |
|||||||||||
приближаться. Результаты такого рассмотрения должны привести к тому, что |
|||||||||||
ω0 |
при |
движении |
магнита |
в |
плоскости, |
||||||
параллельной |
|
контуру, |
так |
же |
с |
||||||
N |
приближением |
|
магнита |
контур |
будет |
||||||
|
отталкиваться, а при удалении увлекаться |
||||||||||
|
за магнитом. |
|
|
|
|
|
|
|
|
|
|
|
Теперь |
перейдем |
к |
рассмотрению |
|||||||
|
принципа |
|
действия |
|
асинхронного |
||||||
|
двигателя. Для начала вспомним, что |
||||||||||
ω |
вращающееся магнитное поле, создаваемое |
||||||||||
тремя катушками с трехфазной системой |
|||||||||||
S |
токов. |
идентично |
полю |
вращающегося |
|||||||
кольцевого |
|
магнита. |
|
Для |
начала |
||||||
|
|
|
|||||||||
Рис. 3.7. Беличья клетка в |
рассмотрение будем проводить как если бы |
||||||||||
у нас в наличии был |
именно |
этот |
|||||||||
качестве ротора |
кольцевой магнит. |
|
|
|
|
|
|
||||
|
34 |
|
|
|
|
|
|
|
|
|
|
Поместим в полость вращающегося кольцевого магнита прямоугольный контур из проводящего материала. Как мы только что рассмотрели, этот контур будет испытывать на себе действие силы, отталкивающей его от приближающегося полюса магнита, то есть сдвигать его вправо, по часовой стрелке.
Усложним конструкцию. Поместим в полость кольцевого магнита так называемую беличью клетку из проводящего материала (рис. 3.7).
Она состоит из двух колец, соединенных между собой стержнями. Каждая пара стержней образует замыкающийся через отрезки колец контур. Таким образом, по окружности беличьей клетки можно обнаружить столько замкнутых контуров, сколько стержней установлено между кольцами. Приближаясь к каждому из них, полюс магнита будет его отталкивать и создавать вращающий момент в направлении собственного вращения. Пройдя над контуром и удаляясь от него, он будет его тянуть за собой и продолжать поддерживать вращающий момент того же направления. При этом угловая скорость ω беличьей клетки должна быть меньше угловой скорости ω0 вращения кольцевого магнита. Ведь при одинаковых скоростях их взаимное расположение не будет меняться, а значит магнитный поток, пронизывающий контуры беличьей клетки, не будет изменяться. В то же время закон электромагнитной индукции говорит о том, что именно изменение магнитного потока, сцепленного с контуром, порождает в нем ЭДС. Не будет ЭДС, не будет и индукционного тока в контуре, не будет он создавать своего магнитного поля, и не с чем будет взаимодействовать магнитному полю кольцевого магнита и не сможет он создавать вращающий момент.
В связи с разными скоростями вращения ротора и вращающегося магнитного поля двигатель, основанный на этом принципе, называется асинхронным. Как вы уже догадались, в асинхронном двигателе вместо кольцевого вращающегося магнита используются три катушки с трехфазным током, создающие вращающееся магнитное поле. В остальном все наши рассуждения остаются в силе.
Надо добавить еще только, что такой двигатель называется асинхронным двигателем с замкнутым ротором в отличие от асинхронного двигателя с так называемым фазным ротором, в котором на роторе только три контура. Точнее это даже не просто контуры, а катушки, расположенные на роторе со сдвигом на 120° в пространстве по ободу ротора. Концы их выводятся на контактные кольца. К кольцам подходят скользящие контакты, к которым присоединены реостаты. Сопротивление реостатов можно изменять, изменяя таким образом сопротивление цепи ротора. Это, конечно, усложняет конструкцию, удорожает изделие, однако дает и дополнительные преимущества, о которых поговорим позже.
Важнейшей характеристикой двигателя является его механическая характеристика. Это зависимость частоты вращения от момента нагрузки на валу двигателя. Для асинхронных двигателей вводят в рассмотрение еще одну величину: скольжение. Оно показывает, как сильно ротор отстает
35

(проскальзывает) относительно магнитного поля. Значение скольжения определяется формулой
s = ω0 −ω = n0 −n
ω0 n0
и составляет обычно несколько сотых, то есть скорость вращения ротора меньше скорости вращения магнитного поля всего на несколько процентов.
В этой формуле через s обозначено скольжение,
ω0 и ω – угловые скорости магнитного поля и ротора, а n0 и n – частоты вращения того и другого (об/мин).
Как видим, при n = 0, например, при запуске, когда напряжение уже подключили, а ротор из-за инерционности еще не начал вращаться, скольжение s = 1. Когда же нагрузки нет (в режиме холостого хода), для равномерного вращения по инерции не надо прикладывать вращающий момент к ротору (точнее надо приложить очень малый момент для преодоления сил трения в подшипниках и сил сопротивления о воздух), скорость ротора ω стремится к ω0, а скольжение s к 0.
По оси ординат графика механической характеристики часто откладывают
не только n, но и s. |
|
|
|
|
|
||||||||
Одной |
из |
простейших |
n |
s |
|
||||||||
формул |
для |
|
расчета |
графика |
|
||||||||
|
|
|
|||||||||||
механической |
характеристики |
n0 |
s=0 |
|
|||||||||
является формула Клосса |
|
|
|||||||||||
M = |
|
2M max |
. |
|
|
|
nном |
s=sном |
|
||||
|
|
s |
sкр |
|
|
|
|
|
|
|
|||
|
|
|
+ |
|
|
|
|
|
|
|
s=sкр |
|
|
|
|
sкр |
|
s |
|
|
|
|
|
||||
Ее |
можно |
принять |
как |
|
|
|
|||||||
довольно хорошее приближение |
|
|
|
||||||||||
к правильной зависимости между |
|
|
|
||||||||||
s и M или между n |
и |
M , |
n=0 |
s=1 |
М |
||||||||
несмотря на то, что многие, |
|
Mном Mпуск |
Mmax |
||||||||||
незначительно |
влияющие |
на |
|
||||||||||
процесс факторы |
в этой формуле |
Рис. 3.8. Механическая характеристика |
|||||||||||
не учитываются. |
|
|
|
||||||||||
|
|
|
асинхронного двигателя с фазным ротором |
||||||||||
В этой формуле и на графике |
|||||||||||||
|
|
|
|||||||||||
(рис.3.8), построенном по этой |
|
|
|
||||||||||
формуле |
|
|
|
|
|
|
|
|
|
|
|
||
Мmax – максимальный |
момент, который |
может развивать |
двигатель. Ему |
||||||||||
соответствует критическое скольжение sкр. Если приложить к валу двигателя тормозящий момент больший, чем Мmax , двигатель остановится. Мном -
номинальный вращающий момент, с которым двигатель может работать, не перегреваясь долгое время. Величина тесно связана с перегрузочной
36
способностью двигателя и может иметь значение для разных двигателей от 1,5
до 3,5.
|
Из формулы |
Клосса можно найти, что |
, |
где |
, а |
и относятся к номинальному режиму. |
|
Интересно, что при увеличении сопротивления обмотки ротора rР, скольжение при тех же моментах на валу двигателя увеличивается, однако максимальный момент Мmax, который может развивать двигатель, не меняется до тех пор, пока значение максимального момента не станет приходиться на скольжение, равное 1. Иными словами, пока максимальный момент не будет приходиться на включение двигателя, когда ротор еще неподвижен, не успел раскрутиться.
Новое скольжение, соответствующее прежним моментам, по которым строилась механическая характеристика, можно найти по формуле
или .
Последняя формула применяется для расчета скольжения (или с его помощью расчета частоты вращения) в асинхронных двигателях специальной конструкции, в которых концы обмоток ротора выведены на контактные кольца, к которым через скользящие контакты подключаются дополнительные сопротивления rД. Такие двигатели называются асинхронными двигателями с фазным ротором, в отличие от двигателя без выводов концов обмоток ротора на контактные кольца, которые называются двигателями с короткозамкнутым ротором. Используются двигатели с фазным ротором там, где надо с помощью дополнительного сопротивления регулировать скорость вращения двигателя или когда надо увеличить пусковой момент для более быстрого разгона двигателя или пуска под нагрузкой. Механическая характеристика двигателя без дополнительного сопротивления называется естественной, а при включении дополнительного сопротивления искусственной. Понятно, что в этом смысле искусственные механические характеристики могут быть только у двигателей с фазным ротором.
3.2. Задание
По данным таблицы 3.1 для вашего варианта найти :
1.Число пар полюсов на статоре двигателя р;
2.Определить частоту вращения магнитного поля n0;
3.Скольжение при номинальной нагрузке sH ;
4.Номинальный MH, пусковой MП и максимальный Mmax вращающие моменты;
5.Активную мощность, потребляемую из электросети Р;
6.Номинальный и пусковой токи статора IH и IП.
37
Во всех вариантах будем считать, что задан двигатель, рассчитанный на напряжение 380 В при включении трехфазных обмоток ротора звездой и на напряжение 220 В при включении их треугольником.
Таблица 3.1 Сведения о трехфазных двигателях с короткозамкнутым ротором.
№ |
Тип |
Рн, |
nн, |
ηн, |
CosφН |
Mmax/МН |
МП/MH |
IП/IH |
вар |
двигателя |
кВт |
об/мин |
% |
|
|
|
|
1 |
4А80А4У3 |
1,1 |
1420 |
75,0 |
0,81 |
2,2 |
2,0 |
5,0 |
2 |
4А80B4У3 |
1,5 |
1415 |
77,0 |
0,83 |
2,2 |
2,0 |
5,0 |
3 |
4А90L4У3 |
2,2 |
1425 |
80,0 |
0,83 |
2,4 |
2,1 |
6,0 |
4 |
4А100S4У3 |
3,0 |
1435 |
82,0 |
0,83 |
2,4 |
2,0 |
6,0 |
5 |
4А00L4У3 |
4,0 |
1430 |
84,0 |
0,84 |
2,4 |
2,0 |
6,0 |
6 |
4А112M4У3 |
5,5 |
1445 |
85,5 |
0,85 |
2,2 |
2,0 |
7,0 |
7 |
4А132S4У3 |
7,5 |
1455 |
87,5 |
0,86 |
3,0 |
2,2 |
7,5 |
8 |
4А132M4У3 |
11,0 |
1460 |
87,5 |
0,87 |
3,0 |
2,2 |
7,5 |
9 |
4А160S4У3 |
15,0 |
1465 |
88,5 |
0,88 |
2,3 |
1,4 |
7,0 |
10 |
4А160M4У3 |
18,5 |
1465 |
89,5 |
0,88 |
2,3 |
1,4 |
7,0 |
11 |
4А180S4У3 |
22,0 |
1470 |
90,0 |
0,90 |
2,3 |
1,4 |
6,5 |
12 |
4А180M4У3 |
30,0 |
1470 |
91,0 |
0,90 |
2,3 |
1,4 |
6,5 |
13 |
4А200M4У3 |
37,0 |
1475 |
91,0 |
0,90 |
2,5 |
1,4 |
7,0 |
14 |
4А200L4У3 |
45,0 |
1475 |
92,0 |
0,90 |
2,5 |
1,4 |
7,0 |
15 |
4А225M4У3 |
55,0 |
1480 |
92,5 |
0,90 |
2,5 |
1,3 |
7,0 |
16 |
4А250S4У3 |
75,0 |
1480 |
93,0 |
0,90 |
2,3 |
1,2 |
7,0 |
17 |
4А250M4У3 |
90,0 |
1480 |
93,0 |
0,91 |
2,3 |
1,2 |
7,0 |
18 |
4А80B6У3 |
1,1 |
920 |
74,0 |
0,74 |
2,2 |
2,0 |
4,0 |
19 |
4А90L6У3 |
1,5 |
935 |
75,0 |
0,74 |
2,2 |
2,0 |
4,5 |
20 |
4А100L6У3 |
2,2 |
950 |
81,0 |
0,73 |
2,2 |
2,0 |
5,0 |
21 |
4А112MB6У3 |
3,0 |
955 |
81,0 |
0,76 |
2,5 |
2,0 |
6,0 |
22 |
4А112MB6У3 |
4,0 |
950 |
82,0 |
0,81 |
2,5 |
2,0 |
6,0 |
23 |
4А132S6У3 |
5,5 |
965 |
85,0 |
0,80 |
2,5 |
2,0 |
6,5 |
24 |
4А132M6У3 |
7,5 |
970 |
85,5 |
0,81 |
2,5 |
2,0 |
6,5 |
25 |
4А160S6У3 |
11,0 |
975 |
86,0 |
0,86 |
2,0 |
1,2 |
6,0 |
26 |
4А160M6У3 |
15,0 |
975 |
87,5 |
0,87 |
2,0 |
1,2 |
6,0 |
27 |
4А180M6У3 |
18,5 |
975 |
88,0 |
0,87 |
2,0 |
1,2 |
5,0 |
28 |
4А200M6У3 |
22,0 |
975 |
90,0 |
0,90 |
2,4 |
1,3 |
6,5 |
29 |
4А200L6У3 |
30,0 |
980 |
90,5 |
0,90 |
2,4 |
1,3 |
6,5 |
30 |
4А225M6У3 |
37,0 |
980 |
91,0 |
0,89 |
2,3 |
1,2 |
6,5 |
31 |
4А250S6У3 |
45,0 |
985 |
91,5 |
0,89 |
2,1 |
1,2 |
6,5 |
32 |
4А250M6У3 |
55,0 |
985 |
91,5 |
0,89 |
2,1 |
1,2 |
6,5 |
33 |
4А280S6У3 |
75,0 |
985 |
92,0 |
0,89 |
2,2 |
1,4 |
5,5 |
34 |
4А280M6У3 |
90,0 |
985 |
92,5 |
0,89 |
2,2 |
1,4 |
5,5 |
38
3.3.Порядок выполнения
1.Так как n0 = 3000/p, а номинальная частота вращения ротора на несколько процентов ниже синхронной, число пар полюсов на фазу можно найти, взяв целую часть от деления 3000 на nH .
2.Используя все ту же исходную формулу n0 = 3000/p, найдем синхронную скорость вращения.
3.По формуле из теоретической части к разделу Машины переменного
тока найдем номинальное скольжение |
. |
4. Из формулы мощности для вращающихся тел: |
|
найдем номинальный момент |
. В последней формуле не |
забудьте перевести мощность из киловатт в ватты. Максимальный момент найдем по заданному в таблице значению λ = Mmax/MH. Прежде чем искать
пусковой момент, найдем критическое скольжение |
. Теперь, |
положив в формуле Клосса s = 1 (значения всех остальных величин мы уже знаем), найдем соответствующий этому скольжению пусковой момент.
5. Мощность, потребляемую из сети, найдем по номинальной мощности и коэффициенту полезного действия в номинальном режиме:
6. Из формулы мощности для трехфазной системы токов
получаем, что при включении обмоток звездой |
. При соединении |
нагрузки звездой фазные токи (в нашем случае токи в обмотках) равны линейным токам. Пусковой ток найдем по заданному в таблице 3.1
соотношению |
между пусковым и номинальным токами. |
39
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1.Немцов, Н. В. Электротехника и электроника : учебник для вузов/ Н.В.Немцов. – М.: Издательство МЭИ, 2003. – 597[3]с.,ил.
2.Борисов, Б. М. Электротехника : учебник для вузов /Ю. М. Борисов, Д. Н. Липатов, Ю. Н. Зорин.– 2-е изд. – М. : Энергоатомиздат, 1985.– 552 с.,ил.
3.Иванов, И. И. Электротехника/И. И. Иванов, А. Ф. Лукин, Г. И. Соловьев. Основные положения, примеры и задачи. – СПб. : Издательство «Лань», 1999. – 192 с. Серия «Учебники для вузов. Специальная литература»
4.Графики в студенческих работах : методические указания студентам к оформлению графиков в расчетно-графических работах, индивидуальных заданиях заочников и в отчетах о выполнении лабораторных работ по дисциплинам цикла ТОЭ и ОЭ /сост. Е. И. Голобородько. – Ульяновск : УлГТУ, 2006. – 16 с.
Учебное издание
Электрические машины
Методические указания и задания Составитель ГОЛОБОРОДЬКО Евгений Иванович
Редактор Н. А. Евдокимова
Подписано в печать 30.11.2007. Формат 60х84/16. Бумага писчая. Печать трафаретная. Усл.печ. л. 2,32.
Тираж 100 экз.
Ульяновский государственный технический университет 432027, Ульяновск, Сев. Венец, 32.
Типография УлГТУ, 432027, Ульяновск, Сев. Венец, 32.
40