

ЭУР
.pdfРисунок 6.3 Функциональная блок-схема микроконтроллера Atmega16
4.2 Датчик угла поворота рулевого колеса.
Датчик угла поворота рулевого колеса расположен под возвратным и скользящим кольцами подушки безопасности. Он установлен на рулевой колонке между подрулевыми переключателями и рулевым колесом. Этот датчик генерирует сигнал, соответствующий углу поворота рулевого колеса.
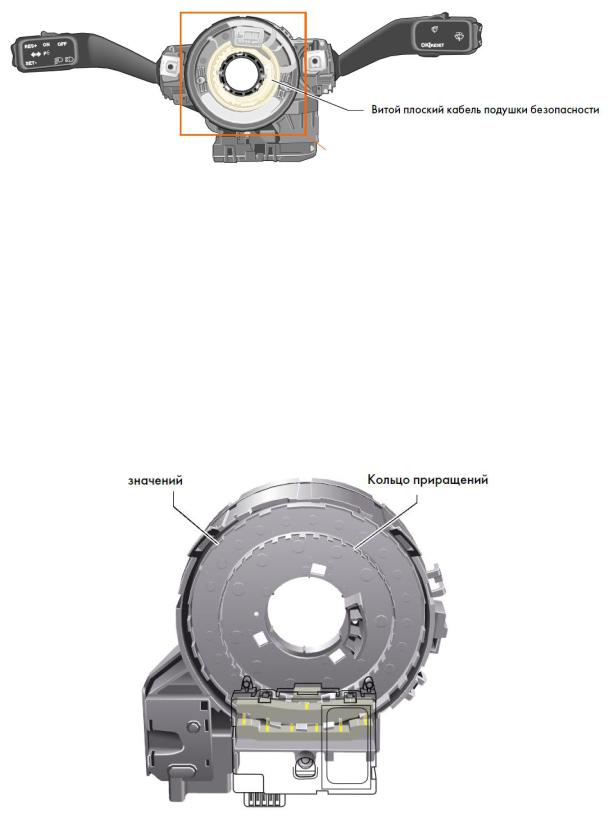
Сигнал датчика передается на микроконтроллер, в котором он подвергается дальнейшей обработке.
Рисунок 6.4 Расположение датчика угла поворота.
Основными деталями датчика угла поворота рулевого колеса являются:
●кодирующий диск с двумя кольцами и
●фотоэлектрические пары, каждая из которых содержит источник света и фотоэлемент.
На кодирующем диске предусмотрены два кольца: внешнее кольцо служит для определения абсолютных значений угла поворота рулевого колеса,
а внутреннее кольцо – для определения приращений этого угла.
Рисунок 6.5 Датчик угла поворота рулевого колеса
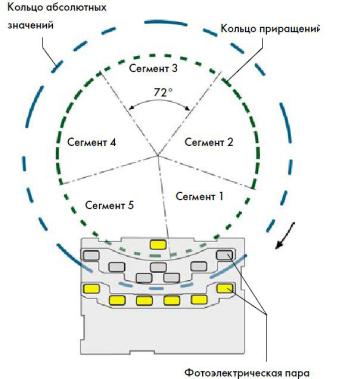
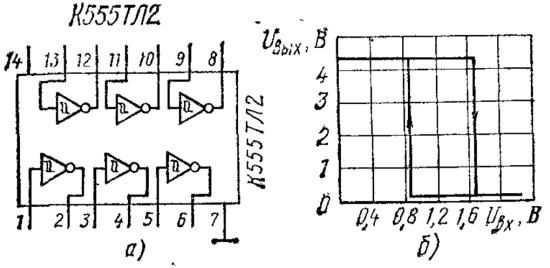
Кольцо приращений разделено на 5 сегментов по 72°. Оно используется в сочетании с одной фотоэлектрической парой. В пределах каждого из сегментов кольцо имеет несколько вырезов. Чередование вырезов в пределах одного сегмента не изменяется, а в отдельных сегментах оно отличается. Благодаря этому осуществляется кодирование сегментов. Внешнее кольцо служит для определения абсолютных значений угла поворота рулевого колеса. Он используется в сочетании с шестью фотоэлектрическими парами.
Рисунок 6.6 Структурная схема датчика угла поворота рулевого колеса
Датчик угла поворота рулевого колеса позволяет отсчитывать его в пределах до 1044°. Отсчет угла производится путем суммирования числа градусов. При переходе через метку, соответствующую 360°, датчик регистрирует завершение поворота на один полный оборот. Конструкцией рулевого механизма предусмотрена возможность поворота рулевого колеса на
2,76 оборота.
Выберем для фотоэлектрических пар датчика угла поворота светодиоды
AL108AM и фотодиоды BPW41N.
Электрическая схема оптических энкодеров работает следующим образом.
При открытой «шторке» оптической пары (светодиод фотодиод),
обратный ток фотодиода может достигать 45 мкА. В нашем случае ток ограничивается резистором 240 Ком и его значение в состоянии насыщения выхода операционного усилителя будет равен 20 мкА. Когда световой поток перекрыт «шторкой» обратный темновой ток светодиода будет составлять 30
нА. Этот ток будет создавать падение напряжения на резисторе обратной связи
(ОС), сопротивление которого 240 Ком, 7,2 мВ. Таким образом, преобразование тока в напряжение будет формировать сигналы соответствующие уровням логического 0 или 1.
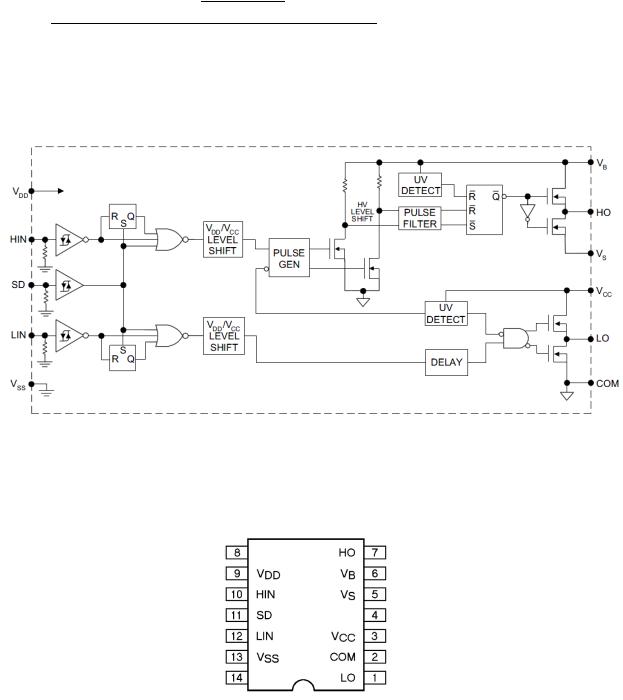
Для предотвращения дребезга в моменты перехода из одного состояния в другое и формирования более крутого фронта (спада) сигнал с выхода оптического преобразователя подается на вход контроллера через буферную схему – Триггер Шмитта, имеющий внутреннюю структуру компаратора с положительной ОС.
Рисунок 6.7 Триггер Шмитта а) Структурная схема б) Гистерезисная передаточная характеристика

4.3 Расчет токоограничивающих резисторов для светодиодов излучателей
Расчет токоограничивающих резисторов будем производить по формуле:
(6.1)
где Uп – напряжение питания;
UVD – падение напряжения на светодиоде;
IVD – ток, проходящий через светодиод.
Для подобранных компонентов электрической схемы:
Uп = 12 В; UVD = 1,6 В; IVD = 100 мА.
Подставим значения в формулу (6.1), получим:
Из стандартного ряда выбираем резистор с сопротивлением 120 Ом.
4.4 Выбор драйверной схемы.
В проектируемой системе был выбран электродвигатель постоянного тока.
Данный двигатель рассчитан на потребление тока 19,2 А. Ток на выходе микроконтроллера составляет порядка 20 мА. Поэтому необходимо использовать схему усиления по току.
В мостовой схеме управления двигателем применяются транзисторы типа
IRF540 параметры когторого:
Id =28 A > Iэд;
Uds= 100 B > Uпдв.

Управление транзисторами осуществляется посредством драйверной схемы.
Для подбора драйверной микросхемы необходимо определить среднюю величину мощности драйвера по формуле:
(6.2)
где f – частота коммутации(несущая частота ШИМ);
Qg – общий заряд затвора;
Ug – напряжение на затворе.
Для транзисторов IRF540:
Qg = 72 нКл;
Ug = 12 В;
f = 20 кГц.
Подставим значения в формулу (6.2), получим:
Так же нам необходимо определить максимальный ток стока IDmax по формуле:
(6.3)
где Qg – общий заряд затвора;
td – время коммутации.
Qg = 72 нКл;
td = 53 нС
Подставим значения в формулу (6.3), получим:

Выбираем драйверную схему IR 2113 у которой:
Iout = 2 A > ;
PD= 1,6 Вт > Рупр.
Величину бутстрепной емкости рассчитаем по формуле:
(6.4)
где Qg – заряд затвора;
Ucc – напряжение питания схемы управления;
Uf – падение напряжения на бутстрепном диоде (0,8..1,0 В);
f – частота коммутации;
Iqbs – ток потребления выходного каскада в статическом режиме;
Qls – циклическое изменение заряда драйвера.
Для подобранных компонентов электрической схемы:
Qg = 72 нКл;
Ucc = 5 В;
Uf = 1 В;
f = 20 кГц;
Igbs= 125·10-6 A;
Qls = 5 нКл.
Подставим значения в формулу (6.4), получаем:
Ниже на рисунке 6.8 представлена функциональная схема драйверной микросхемы IR 2113.
Рисунок 6.7 Функциональная схема микросхемы IR 2113
На рисунке 6.8 приведены выводы микросхемы IR 2113.
Рисунок 6.8 Выводы микросхемы IR2113
4.5 Измеритель тока двигателя
Измеритель тока двигателя реализуем, используя интегрированный инструментальный усилитель (ИУ) INA 122. Коэффициент усиления данного ИУ определяется сопротивлением резистора RG.
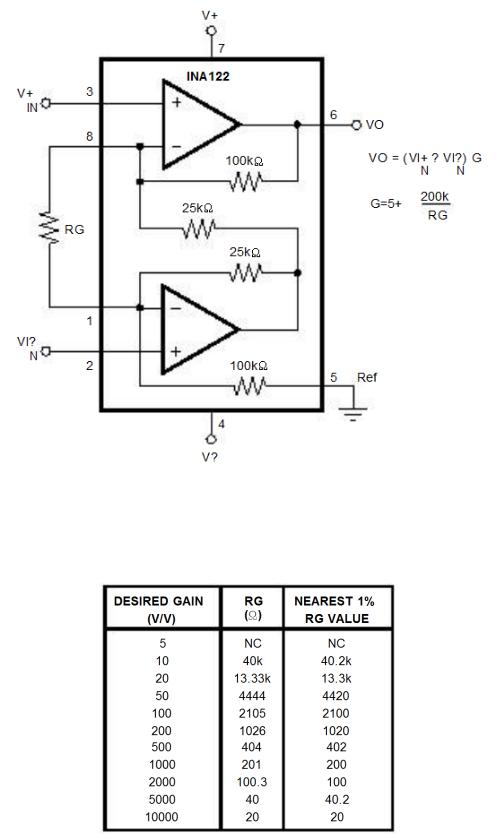
Рисунок 6.9 Структурная схема INA 122
Таблица 1.1 Соответствия Ку и RG
Вкачестве датчика тока используется шунт, включенный последовательно
сякорной обмоткой двигателя. Сопротивление этого резистора выбираем исходя из следующих требований:

падение напряжения на резисторе при максимальном токе двигателя не должно превышать диапазон выходного напряжения ИУ;
Рассеиваемая мощность на резисторе не должна приводить к его разогреву, так как это будет вносить значительные погрешности в измерения.
Принимаем тепловую мощность Р<0,1 Вт, тогда
P = I2·R |
(6.5) |
Из формулы 6.5 получаем, что
R = P/I2 |
(6.6) |
R = 0.1/19.22 = 0.27 мОм
Подберем значение коэффициента усиления ИУ. Он подбирается из условия:
(6.7)
где Iя- ток якоря;
Rш – сопротивление шунта;
Ку – коэффициент усиления;
Uвых – напряжение на выходе.
Диапазон Uвых фактически равен падению напряжения Uп, в нашем случае от 0 до 5 В. Для того, чтобы гарантировано не создавать ситуацию насыщения выхода примем Uвых = 4 В. Следовательно из формулы 6.7: