

Лаб работа Автоматика2
.pdf(ПР) и объекта регулирования (ОР), охваченных отрицательной обратной связью (рисунок 2.1). Основным возмущающим воздействием здесь является нагрузка объекта Z, изменение которой компенсируется регулирующим воздействием X. Выходная величина двухпозиционного регулятора Х может принимать только два значения, соответствующие максимальному (Хmах) и минимальному (Хmin) регулирующему воздействию на объект.
 YЗ
YЗ
Х Y 
 ПР
ПР  ОР
ОР 
 Y
Y
Рисунок 2.1 - Структурная схема автоматической системы двухпозиционного регулирования
Х |
|
|
Х |
||||||||
Хмах |
|
|
|
Хмах |
|
|
|
|
σy |
||
|
|
|
|
|
|||||||
Хмин |
|
|
Y |
Хмин |
|
|
|
|
|||
|
|
|
|
|
|
|
Y |
||||
|
|
|
|
|
|
|
|||||
|
Yз |
|
|
|
Yн Yз Yм |
||||||
Рисунок 2.2а – Статическая |
|
|
Рисунок 2.2б – Статическая |
||||||||
характеристика идеального |
|
|
характеристика реального |
||||||||
двухпозиционного регулятора |
|
двухпозиционного регулятора |
|||||||||
На рисунке 2.2а изображена статическая характеристика идеального двухпозиционного регулятора, мгновенно меняющего свой выходной сигнал Х при достижении регулируемой величиной Y заданного значения YЗ. Реальный регулятор обладает некоторой зоной нечувствительности σу (рисунок 2.2б), в пределах которой изменение регулируемой величины Y не приводит к изменению регулирующего воздействия Х Другими словами, регулятору необходимо некоторое время для срабатывания, поэтому он начинает вступать в работу с запаздыванием.
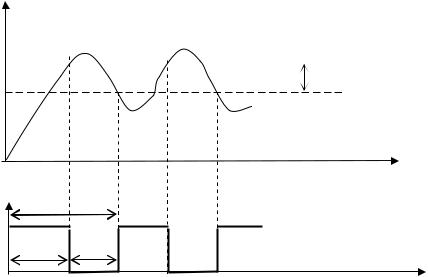
При Y<Yз идеальный позиционный регулятор вырабатывает регулирующее воздействия Х=Хmax, вызывающее изменение выходной величины Y (см. рисунок 2.3).
11
Y
Yз 
 σy
σy
0 |
t |
Х |
Т |
|
|
Хмах |
То |
Тв |
|
Хmin |
t |
Рисунок 2.3 - Изменение выходной величины Y и регулирующего воздействия X при симметричных автоколебаниях (регулятор с зоной
нечувствительности σy)
При достижении Y величины Yз регулятор должен был бы сработать, однако, ввиду наличия зоны нечувствительности σу, изменение регулирующего воздействия с Xmax до Xmin происходит с некоторым запаздыванием, при Y>Yз (рисунок 2.3). Таким образом, при использовании двухпозиционных регуляторов величина Y совершает колебания относительно заданного значения Yз. Такие колебания относительно среднего значения с амплитудой А и периодом Т называются автоколебаниями. Период автоколебаний Т = Тв + То, где Тв и Топериоды включения (Х = Xmax) и отключения (Х = Xmin) сигнала регулирующего воздействия соответственно. На рисунке 2.3 изображены так называемые симметричные автоколебания (относительно линии Y = Yз) регулируемой величины.
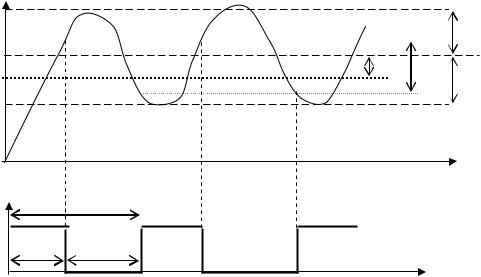
На практике чаще приходится сталкиваться с автоколебаниями, форма которых несимметрична относительно линии Y = Yз (см. рисунок 2.4).
При несимметричных автоколебаниях возникает так называемая квазистатическая ошибка регулирования «а», равная отклонению среднего значения (оси) автоколебаний от заданного значения регулируемой величины Yз. При Тв< То, а >0, т.е. среднее значение автоколебаний лежит выше прямой Y=Yз и наоборот. Качество двухпозиционного регулирования характеризуется параметрами возникающих в системе автоколебаний: амплитудой А, частотой колебаний и смещением «а» среднего значения относительно заданного значения Yз. Эти параметры зависят от времени запаздывания tз и емкости объекта регулирования, его нагрузки Z, величины зоны нечувствительности регулятора σу и пределов изменения регулирующего воздействия ∆Х= Хmах- Хmin .Чем меньше А и «а», тем выше качество регулирования, при этом частота колебаний не должна быть очень большой.
12
У |
|
A |
|
|
|
|
ось реальных |
||
|
a |
σy |
||
Уз |
колебаний |
|||
|
A |
0 |
t |
|
|
Т |
Хмах |
Тв |
То |
Хmin |
|
t |
Рисунок 2.4 - Изменение выходной величины при несимметричных автоколебаниях
С увеличением зоны нечувствительности позиционного регулятора σу качество регулирования ухудшается: увеличивается амплитуда А и период колебаний Т в системе. Амплитуда уменьшается с уменьшением ∆Х, т.е. величины регулирующего воздействия. Однако здесь необходимо иметь в виду, что величины Хmах и Хmin зависят от нагрузки объекта Z. Поэтому большие пределы изменения регулирующего воздействия ∆Х могут быть установлены только при незначительных колебаниях нагрузки объекта регулирования.
От нагрузки объекта зависит, в основном, величина и знак параметра «а» - смещения оси автоколебаний относительно Yз. При определенной нагрузке Z=Zо для данного объекта а=0. При Z>Zo величина а<0, а при Z<Zо для данного объекта а>0. Отклонение нагрузки от Zо в обе стороны приводит к возрастанию периода автоколебаний Т.
Позиционные регуляторы просты по конструкции, надежны в работе, несложные в настройке и обслуживании. Поэтому во всех случаях, когда позиционные регуляторы способны обеспечить требуемое качество регулирования, следует применять именно их. Обычно позиционные регуляторы используют на объектах, обладающих малым запаздыванием, большой емкостью.
2.2 Описание лабораторного стенда
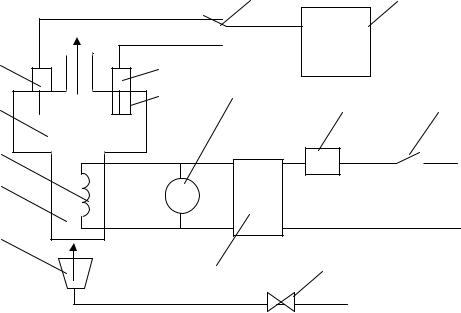
Воздух от компрессора (см. рисунок 2.5) продувается через электрическую печь 1 и камеру 3, в которой установлены два одинаковых датчика температуры 4 и 5 (термоэлектрический преобразователь ТХК-0515), причем датчик 4 помещен дополнительно в чехол 6.
13
|
9 |
10 |
|
|
КСП 2 |
4 |
5 |
|
6 |
12 |
14 |
3 |
13 |
|
2 |
|
|
1 |
|
~220 В |
|
|
|
7 |
|
|
11 |
8 |
|
РРисунок 2.5 - Схема лабораторного стенда для исследования двухпозиционного регулирования привода:
1 - электрическая печь; 2 - электрический нагреватель; 3 - камера; 4,5 - датчики температуры; 6 - чехол; 7 - ротаметр;
8 - вентиль; 9 - переключатель температуры; 10 - автоматический потенциометр с позиционным регулятором; 11 - автотрансформатор;
12 - вольтметр; 13 - реле; 14 - выключатель
Расход воздуха устанавливается по ротаметру 7 с помощью вентиля 8, а напряжение на нагревательном элементе электрической печи 1 - по вольтметру 12. Датчики температуры 4 и 5 через переключатель 9 подсоединяются ко вторичному прибору 10, имеющему встроенное двухпозиционное регулирующее устройство, управляющее реле 13. С помощью реле 13 осуществляется включение и отключение нагревательного элемента 2 в процессе двухпозиционного регулирования температуры в камере 3 (если ко вторичному прибору подключен датчик 5). Подача питания на стенд производится тумблером 14.
Регулирующее устройство КСП-2 установлено в верхней части прибора и подключается к измерительной схеме с помощью штепсельного разъема. Корпус устройства служит основанием, по которому могут перемещаться два микропереключателя с указателями задач зеленого (соответствующий нижнему заданному значению регулируемой величины) и красного цвета (соответствующий верхнему заданному значению регулируемой величины). При движении каретки со стрелкой вдоль шкалы приборов с зафиксированными указателями происходит срабатывание соответствующих микропереключателей, управляющих через реле 3 нагревательным элементом
2.
14
2.3 Задание на выполнение работы
1)Ознакомиться с принципом двухпозиционного регулирования температуры на примере лабораторного стенда.
2)Экспериментально исследовать влияние на качество двухпозиционного регулирования нагрузки объекта, величины регулирующего воздействия и емкости объекта регулирования.
2.4 Методика выполнения работы
При выполнении данной работы необходимо проанализировать влияние на качество двухпозиционного регулирования (амплитуда автоколебаний А, период колебаний Т, смещение оси автоколебаний «а» относительно данного значения температуры) нагрузки объекта Z (расход продуваемого воздуха), величины регулирующего воздействия Х (напряжение на нагревательном элементе электрической печи) и емкости объекта регулирования (камера 3 или чехол 6). Кроме того, в ходе опытов определяется величина зоны нечувствительности позиционного регулятора σу. Показатели качества регулирования определяются из графиков у=f(t), построенных на миллиметровке для каждого из четырех режимов работы позиционной АСР.
Таблица 2.1 Результаты исследования процесса двухпозиционного регулирования температуры (Уз=…)
Режим |
Нагрузка объекта |
Регулирующее воздействие |
Объект регулирования |
Зона нечувствительнос ти |
Амплитуда колебаний |
Смещение оси автоколебаний |
Период автоколебаний |
|
Z |
Х |
σу |
А |
а |
Т |
|||
|
|
|||||||
|
|
|
|
|
|
|
|
Значения Yз, Z1 и Z2, Х1 и Х2 указываются преподавателем.
О влиянии Z на качество регулирования судят, сравнивая показатели качества 1-го и 2-го режимов, влияние ∆Х оценивается по 2-му и 3-му режимам, влияние емкости объекта регулирования - по 3-му и 4-му режимам (см. таблицу
2.3).
2.5 Порядок выполнения работы
Зеленым и красным указателями предельных значений автоматического потенциометра КСП-2 установите заданные преподавателем пределы регулирования температуры. Подключите к автоматическому потенциометру датчик температуры 4 (левое положение переключателя 9). Тумблером 14 подайте питание на стенд, автотрансформатором 11 по вольтметру 12 установить заданную нагрузку объекта. При достижении температуры воздуха
15

вобъекте регулирования (камера 3) заданного диапазона регулирования включите секундомер и через одну минуту (или указанный преподавателем интервал времени) произведите измерения температуры в объекте регулирования по шкале вторичного прибора. Результаты измерений заносятся
втаблицу 2.2.
Таблица 2.2 - Опытные данные
Объект Х, В Z t, мин Y, ˚С Примечание регулирования
Таблица 2.3 – Режимы работы
Режим |
Нагрузка объекта |
Регулирующее |
Объект |
|
Z |
воздействие Х, В |
регулирования |
1 |
без вентилятора |
220 |
без чехла |
2 |
с вентилятором |
220 |
без чехла |
3 |
без вентилятора |
220 |
с чехлом |
4 |
без вентилятора |
150 |
без чехла |
Следует также отметить моменты срабатывания регулятора в колонке «Примечание» (для определения зоны нечувствительности регулятора σу).
Режимы 2 - 4 исследуются по аналогичной методике. Для каждого опыта измерение температуры воздуха в объекте регулирования производится в течение двух периодов автоколебаний.
По завершении последнего режима работы АСР автотрансформатором 2 уменьшите напряжение на нагревательном элементе до нуля, перекройте подачу воздуха вентилем 8, отключите подачу питания на стенд тумблером 14.
Постройте на миллиметровке кривые автоколебаний автоматической системы двухпозиционного регулирования температуры и определите по ним параметры, характеризующие качество регулирования. Результаты заносятся в таблицу 2.1. Сделайте выводы по работе.
2.6 Требования к отчету
Отчет по данной работе должен содержать:
1)цель работы;
2)описание лабораторного стенда;
3)таблицы и кривые автоколебаний исследованных режимов работы системы двухпозиционного регулирования;
4)выводы по работе.
2.7 Контрольные вопросы
1) Как выглядит структурная схема системы двухпозиционного регулирования? Что здесь является основным возмущением?
16
2)Что называется зоной нечувствительности позиционного регулирования?
3)Как влияет величина зоны нечувствительности на качество регулирования?
4)Какое влияние оказывает на процесс позиционного регулирования величина регулирующего воздействия?
5)Каковы достоинства и недостатки двухпозиционного регулирования?
6)Как влияет на качество двухпозиционного регулирования нагрузка
объекта?
7)Какие параметры влияют на амплитуду автоколебаний?
3 Лабораторная работа № 11. Аналого-цифровое преобразование (АЦП)
Цель работы: Изучить принцип действия и назначение АЦП последовательного приближения. Исследовать работу АЦП К1113ПВ1.
3.1 Общие сведения
Схема АЦП зависит от метода преобразования и от способа его реализации. Можно выделить следующие методы построения АЦП:
-временного преобразования;
-последовательного счета;
-последовательного приближения;
-параллельного преобразования.
Всхеме временного преобразования значению аналогового входного напряжения Uвх ставится в соответствие временной интервал, длительность которого пропорциональна Uвх. Этот интервал заполняется импульсами стабильной частоты, количество которых и является цифровым эквивалентом преобразуемого напряжения.
ВАЦП последовательного счета к выходу счетчика подключается ЦАП, преобразующий код в аналоговый сигнал. Этот сигнал сравнивается с входным напряжением на компараторе, выходной сигнал которого, через элемент «И», разрешает или запрещает прохождение на вход счетчика импульсов от генератора тактовых импульсов. Выходной код счетчика при этом является цифровым эквивалентом напряжения на входе ЦАП, т.е. Uвх.
Более быстродействующими являются АЦП последовательного приближения. Структурная схема АЦП последовательного приближения приведена на рисунке 3.1. В состав этого преобразователя входят компаратор напряжений, ЦАП и регистр последовательного приближения.
После поступления импульса «Пуск» на регистр последовательного приближения РПП на выходе его старшего n-го разряда появляется напряжение логической «1», а на остальных выходах – «0».
На выходе ЦАП формируется напряжение Uвых, которое сравнивается с входным напряжением Uвх. Если Uвх< Uвых, то под действием импульса ГТИ
17
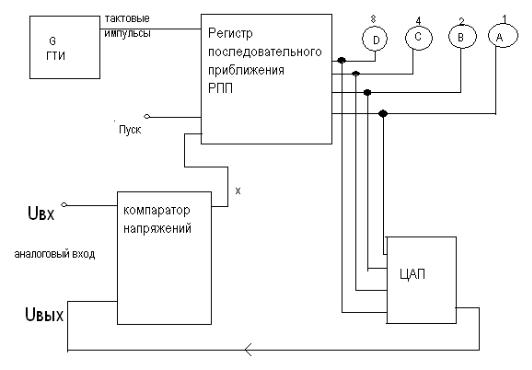
появляется единица на выходе (n-1) разряда и сохраняется единица в старшем разряде. Если Uвх> Uвых, то при появлении единицы в (n-1) разряде РПП содержание предыдущего старшего разряда обнуляется. Так перебираются все разряды до самого младшего. После выполнения последнего n-го сравнения цикл формирования выходного кода заканчивается. Состояние РПП соответствует цифровому эквиваленту входного напряжения. В рассматриваемом АЦП время преобразования t постоянно и определяется числом разрядов n и тактовой частотой f ГТИ.
На рисунке 3.2 приведена блок-схема алгоритма работы АЦП последовательного приближения.
Рисунок 3.1 - Структурная схема АЦП последовательного приближения
Предположим, что на аналоговый вход подано напряжение 7В. РПП засылает «1» в самый старший разряд двоичного числа (в нашем случае – разряд восьмерок). Результат операции – 1000. Компаратор сравнивает двоичное число 1000 и цифровой эквивалент входного напряжения. В нашем случае «больше». Тогда РПП обнуляет разряд восьмерок и устанавливает «1» в разряд четверок. Результат операции (0100) через ЦАП пересылается на вход компаратора.
Компаратор далее отвечает на вопрос, сформулированный в блоке 4: «двоичное число 0100 больше или меньше цифрового эквивалента входного напряжения?» Ответ: «меньше». Регистр последовательного приближения засылает «1» в разряд двоек. Результат (0110) поступает назад к компаратору. Компаратор сравнивает двоичное число 0110 и цифровой эквивалент входного напряжения. Двоичное число 0110 меньше цифрового эквивалента входного напряжения (7В). РПП засылает «1» в самый младший разряд, т.е. в разряд
18
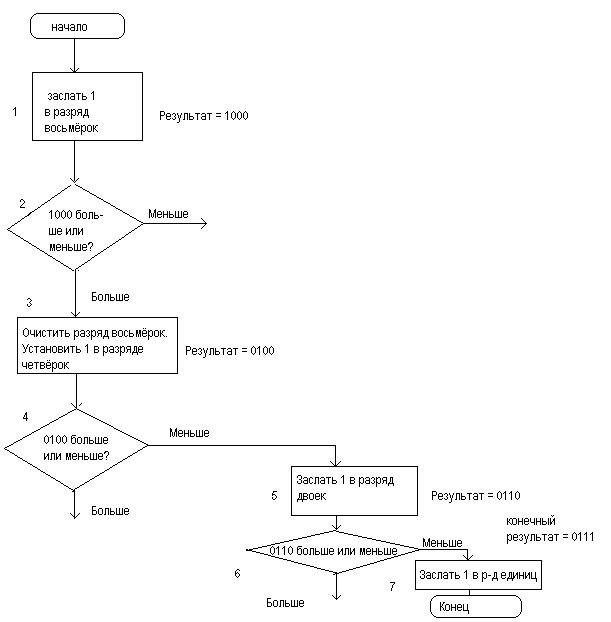
единиц. Окончательный результат: двоичное число 0111. Это и есть цифровой эквивалент входного напряжения 7В.
Рисунок 3.2 - Блок-схема алгоритма работы АЦП последовательного приближения
Исследуемый в лабораторной работе АЦП К1113ПВ1 предназначен для применения в электронной аппаратуре в составе блоков аналогового ввода. Микросхема выполняет функцию 10-разрядного АЦП однополярного или биполярного входного сигнала с представлением результатов преобразования в параллельном двоичном коде.
19
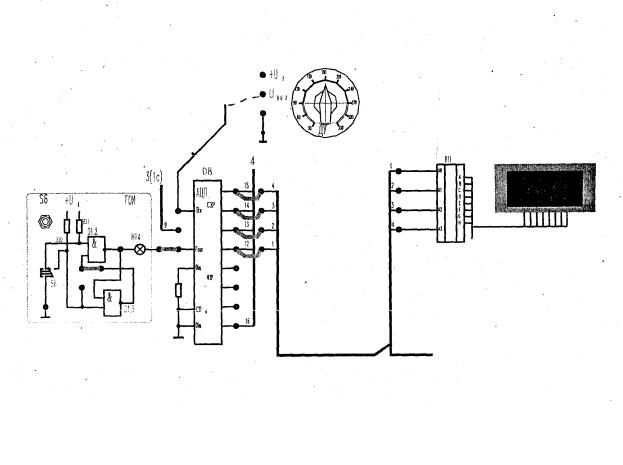
Рисунок 3.3 - Схема установки
3.2 Задание на выполнение работы
1)Изучить принцип действия АЦП последовательного приближения.
2)Собрать схему, изображенную на рисунке 3.3. Питание +15В к ДУ (потенциометрический датчик угла) подсоедините с помощью проводов.
3)Установить ДУ таким образом, чтобы его выходной потенциал был равен нулю. С помощью генератора одиночных импульсов ГОИ подайте управляющий импульс на АЦП и проверьте работоспособность схемы (тумблер S9 включен). Проделайте то же для нескольких ненулевых значений ДУ.
4)Плавно вращая ДУ и используя вольтметр для измерения выходного напряжения ДУ, постройте зависимость Uвых=f(α), где α – угол поворота (30° - 290°). Вместо ГОИ на управляющий вход подайте импульсы «1с». Для этого нужно установить соответствующую перемычку и включить тумблеры S9, S10.
Плавно вращая ДУ и используя вольтметр для измерения входного сигнала и показания семисегментного индикатора, составьте таблицу соответствия: входной сигнал – цифровое значение.
Сравните результаты, полученные при выполнении задания с данными, указанными в документации.
5)Включите в разрыв между Д8 и Д11 регистр Д13 с фильтром G1. На вход одновибратора подайте импульсы готовности данных (выв. 16) с АЦП Д8. Проделайте опыты 3, 4.
20