

MET
.pdfДля равновесия твердого тела, к которому приложена пространственная система сходящихся сил, необходимо и достаточно, чтобы равнодейст-
вующая равнялась нулю: R 0. При этом уравнения равновесия имеют вид:
|
|
|
Fi x 0; Fi y 0; Fi z 0. |
|
|
|||
|
Z |
|
|
M |
D |
|
A |
B |
|
L |
B |
|
|
|
|
||
|
|
|
|
|
|
|
||
H |
A |
|
|
C |
K |
H |
|
L |
|
|
|
|
|||||
|
M |
C |
Y |
L |
H |
|
K |
C |
D |
K |
|
|
B |
A |
D |
|
M |
X |
3.0 |
|
|
|
3.1 |
|
|
3.2 |
|
H |
L |
|
A |
|
B |
|
K |
|
|
|
|
|
C |
|
||
|
|
|
|
|
|
M |
|
|
A |
B |
|
|
K |
C |
|
D |
|
|
|
|
|
|||||
|
D |
M |
|
H |
L |
|
B |
A |
|
|
|
|
|
||||
K |
C |
|
|
D |
M |
L |
|
H |
|
3.3 |
|
|
|
3.4 |
|
|
3.5 |
D |
K |
|
|
B |
L |
|
M |
D |
|
|
|
|
|
||||
|
|
|
|
|
|
|||
A |
C |
|
|
A |
H |
L |
|
H |
H |
|
M |
|
C |
M |
|
C |
K |
L |
B |
|
|
K |
D |
B |
|
A |
|
3.6 |
|
|
|
3.7 |
|
|
3.8 |
|
|
|
|
|
Рис. 3 |
|
|
|
40
|
|
|
Z |
|
P |
|
|
|
45¥ |
|
|
||
|
|
|
|
L |
||
|
|
|
2 |
|
||
|
|
|
|
|
||
C |
|
K |
|
|
3 |
|
|
A |
|
B |
|||
B |
A |
4 |
1 |
|||
|
|
|
||||
|
|
|
6 |
|
Q |
|
M |
D |
D |
θ |
Y |
||
|
||||||
φ |
|
|
M |
|||
|
|
|
|
|||
L |
H |
|
|
|
5 |
|
|
|
X |
|
C |
|
|
3.9 |
|
3.10 |
|
|
||
|
|
Рис. 3. Окончание |
|
|
|
|
1 |
|
z |
D |
|
z |
|
|
|
|
|
|||
|
|
|
|
|
||
M |
|
A y |
|
E |
y |
|
|
|
M |
||||
H |
|
|
|
|
B |
|
D |
|
1 |
H |
|
||
|
|
|
||||
|
|
|
|
|||
E |
|
B |
|
A |
|
|
|
x |
|
x |
|
|
|
|
4.0 |
|
4.1 |
|
|
z |
|
B |
z |
|
B |
|
|
|
|
||
|
|
|
y |
|
|
M |
|
|
A |
|
y |
|
|
|
|
||
x |
|
|
|
M |
E |
K |
|
|
|
||
|
x |
|
|
||
|
|
|
|
||
|
D |
|
|
|
|
H |
|
1 |
|
D |
|
|
|
|
|||
1 |
|
|
H |
|
|
4.2 |
|
|
Рис. 4 |
4.3 |
|
|
|
|
|
|
41
|
|
z |
|
|
|
z |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
E |
|
|
30 |
y |
|
|
B |
|
|
|
|
|
||
|
|
M |
|
|
D |
|
|
B |
|
|
|
|
M |
|
|
|
|
|
|
|
x |
|
E |
|
|
H |
A y |
|
|
H |
|
|
|
|
|
|
D |
|
1 |
|
x |
|
|
4.4 |
|
|
|
4.5 |
|
z |
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
M |
|
|
|
B |
|
|
|
|
H |
|
|
|
|
|
D |
|
|
|
|
H |
D |
1 |
|
|
|
|
y |
|
|
|
||
|
A |
|
|
|
|
|
|
|
|
|
|
|
E |
K |
M |
A |
y |
|
||||
B |
|
|
|
300 |
|
|
|
|
|
x |
|
|
x |
1 |
|
|
|
4.6 |
4.7 |
|
|
|
|
|
z |
2 |
|
1 |
H |
H |
D K |
|
z |
D |
|
||
B |
M |
M |
E |
|
|
|
|||
|
K |
|
|
|
|
|
1 |
B |
y |
|
|
A |
||
|
y |
|
|
|
A |
|
|
|
|
|
|
|
|
|
x |
|
x |
|
|
4.8 |
4.9 |
|
|
|
|
|
Рис. 4. Окончание |
|
|
42
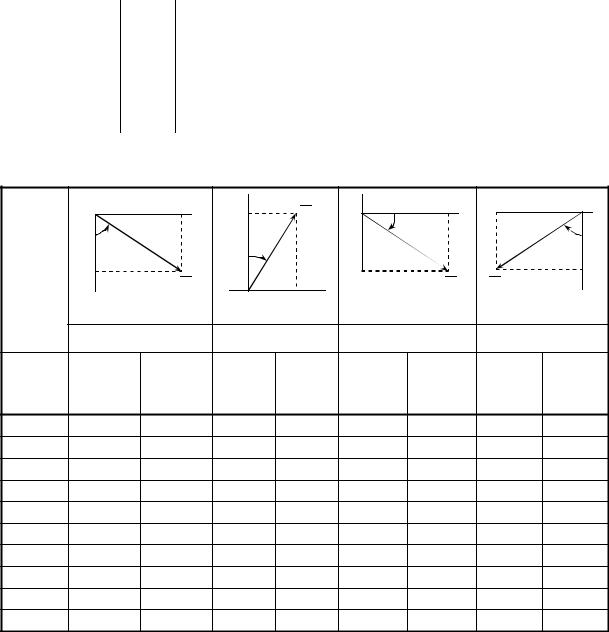
Таблица 4
Номер |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
условия |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
Узлы |
H, M |
L, M |
K, M |
L, H |
K, H |
M, H |
L, H |
K, H |
L, M |
K, M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
HM, HA |
LM, LA |
KM, KA |
LH, LC |
KH, KB |
MH, MB |
LH, LB |
KH, KC |
LM, LB |
KM, KA |
|
Стержни |
|
|
|
|
|
|
|
|
|
|
|
HB, MA |
LD, MA |
KB, MA |
LD, HA |
KC, HA |
MC, HA |
LD, HA |
KD, HA |
LD, MA |
KD, MA |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
MC, MDMB, MCMC, MD |
HB, HC |
HC, HD |
HC, HD |
HB, HC |
HB, HC |
MB, MC |
MB, MC |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 5 |
||
|
|
y |
z |
F 2 |
z |
y |
|
y |
|
|
|
|
|
|
3 |
|
|
||
|
1 |
|
2 |
|
|
|
4 |
||
|
|
|
|
|
|
||||
Силы |
|
F1 |
x |
|
|
F 3 |
F 4 |
x |
|
|
x |
|
|
||||||
|
F1 6 кH |
F2 8 кH |
F3 10 кH |
F4 12 кH |
|||||
Номер |
Точка |
10 |
Точка |
20 |
Точка |
30 |
Точка |
40 |
|
прило- |
прило- |
прило- |
прило- |
||||||
условия |
|||||||||
жения |
|
жения |
|
жения |
|
жения |
|
||
0 |
|
|
Д |
90 |
|
|
Н |
30 |
|
1 |
Д |
45 |
|
|
К |
60 |
|
|
|
2 |
|
|
|
|
Н |
30 |
К |
45 |
|
3 |
|
|
Н |
30 |
Д |
90 |
|
|
|
4 |
Н |
60 |
К |
60 |
|
|
|
|
|
5 |
|
|
Е |
30 |
|
|
Д |
90 |
|
6 |
К |
45 |
|
|
Д |
60 |
|
|
|
7 |
|
|
|
|
К |
60 |
Е |
30 |
|
8 |
|
|
Д |
90 |
Е |
30 |
|
|
|
9 |
Е |
60 |
Н |
45 |
|
|
|
|
|
|
|
Проекции силы на координатные оси |
|
|
|||||
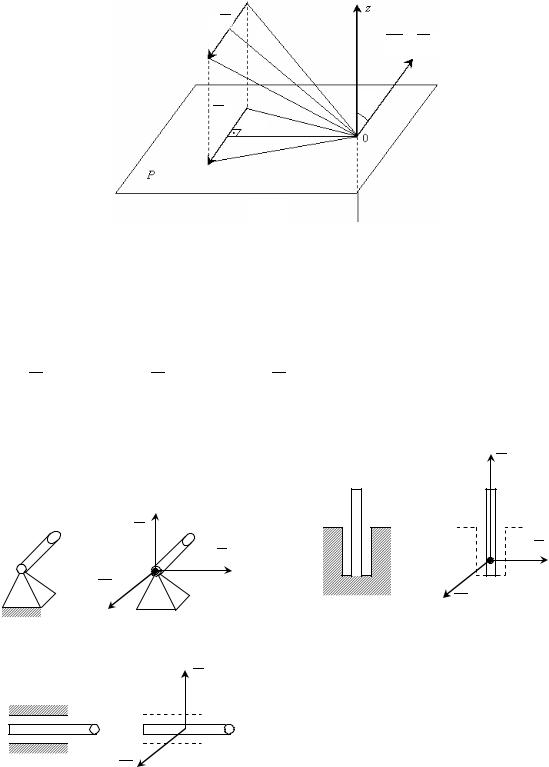
При определении проекции силы на координатную ось, когда неизвестен угол между осью и линией действия силы, используют метод двойного проектирования. Вначале находят проекцию Fx y силы F (рис. 5) на
координатную плоскость xy , а затем вычисляют проекцию вектора Fx y на ось x или y . Fx F cos cos; Fy F cos sin ; Fz F sin .
43
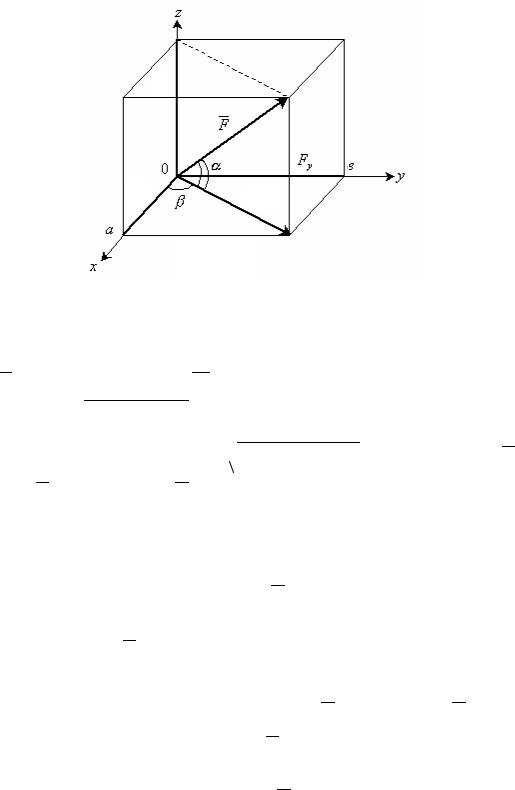
Нужно помнить, что проекция силы на ось является алгебраической величиной, проекция силы на плоскость – есть вектор.
Fz
|
|
|
|
|
|
|
|
Fy |
|
|
|
Fx |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
F xy |
|
|
||||
|
|
|
|
|||||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 5
Произвольная пространственная система сил
Произвольная пространственная система сил приводится к главному вектору R/ и главному моменту M 0 . Модуль главного вектора определяется по формуле R/ 
 Rx2 Ry2 Rz2 , где Ry Fi x ; Ry Fi y ; Rz Fi z .
Rx2 Ry2 Rz2 , где Ry Fi x ; Ry Fi y ; Rz Fi z .
Модуль главного момента M0 
 Mx2 M y2 Mz2 , где M x M x Fi ;
Mx2 M y2 Mz2 , где M x M x Fi ;
M y M y F i ; M z M z Fi .
Момент силы относительно оси
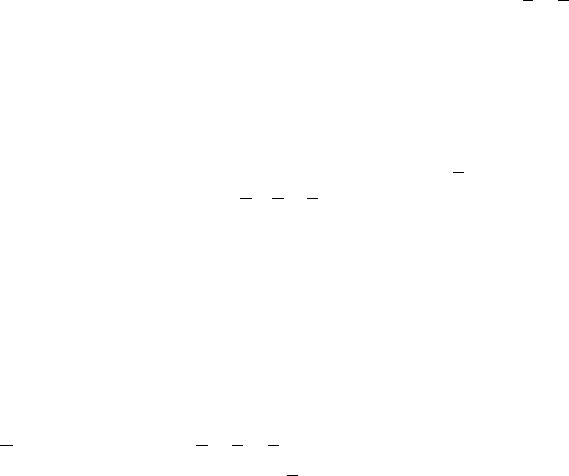
Момент силы относительно оси M z F (рис. 6) определяется как алгебраическая величина, абсолютное значение которой равно произведению модуля проекции силы F p на плоскость P , перпендикулярную к оси z , на кратчайшее расстояние hp от точки 0 пересечения оси с этой плоскостью до линии действия проекции силы на плоскость F p , то есть M z F Fphp .
Если с конца оси z видно, что сила F p стремится повернуть тело вокруг точки 0 против часовой стрелки, то момент положителен, если по часовой стрелке, то отрицателен, то есть M z F Fphp .
44
Момент силы относительно оси равен нулю, если линия действия силы параллельна оси или ее пересекает.
F
h |
M 0 |
(F) |
|
F p hp
Рис. 6
Условия равновесия произвольной пространственной системы сил
Для равновесия твердого тела под действием произвольной пространственной системы сил необходимо и достаточно, чтобы главный вектор и главный момент равнялись нулю.
Получаем уравнения равновесия: Fi x 0; Fi y 0; Fi z 0;M x Fi 0 ; M y Fi 0 ; M z F i 0.
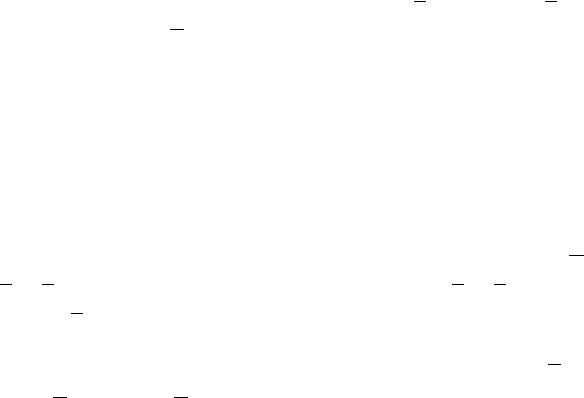
Связи и реакции в пространстве |
|
||
Шаровой (сферический) шарнир |
Подпятник |
Z A |
|
Z A |
|
Y A |
|
Y A |
A |
||
|
|||
A |
|
|
|
X A |
X A |
|
|
|
|
||
Цилиндрический шарнир
Z A
A
X A
45
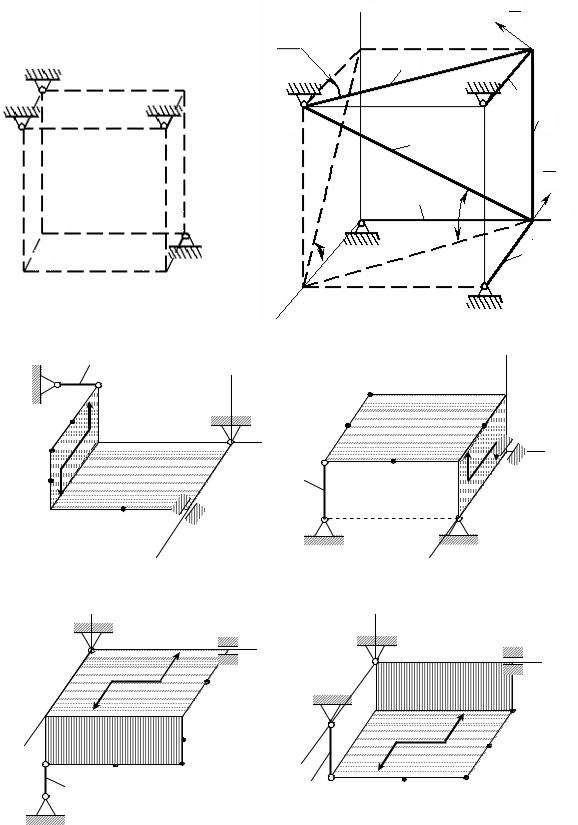
Пример выполнения заданий 3 и 4
Задание 3.
Конструкция состоит из невесомых стержней 1, 2…6, соединенных друг с другом (в узлах H и L ) и с неподвижными опорами А, В, С, Д шарнирами (прил. 2, задание 3, рис. 1). В узлах H и L приложены силы P и Q.
Дано: P 200 H ; Q 100 H ; 1 30 ; 1 60; 2 45;2 45; 45; 60 ; 45.
Требуется определить усилия в стержнях 1 – 6. Решение.
Нарушив связи (стержни), получим два объекта равновесия: узлы Н и L. Сначала рассмотрим равновесие узла Н. Строим расчетные схемы (прил. 2,
задание 3, рис. 2). На узел Н действуют активная сила P и реакции в
стержнях 1, 2, 3 соответственно S1, S 2 , S3 , они направлены по стержням от узла. Получили сходящуюся систему сил в пространстве, для которой
составим три уравнения равновесия: Fi x 0; Fi y |
0; Fi z |
0. |
|
Fi x |
0; S3 cos45 S2 cos45 0; |
|
(1) |
Fi y |
0; S1 S2 cos45 Pcos60 0; |
|
(2) |
Fi z |
0; S3 cos45 Pcos30 0 . |
|
(3) |
Решив уравнения (1), (2), (3), получим: S1 273 H ; S2 |
245 H; |
||
S3 245 H .
Затем рассмотрим равновесие узла L. На узел действуют активная сила Q и реакции стержней S 2 , S5 , S6 . При этом по аксиоме о равенстве
действия и противодействия реакцию S 2 направляем в противоположную сторону. (Равенство действия и противодействия). Составим уравнения равновесия:
Fi x 0; Fi y 0; Fi z 0. |
|
|
Fi x |
0; Qcos45 S4 S2 cos45 S5 cos30cos45 0; |
(4) |
Fi y |
0; S2 cos45 S5 cos30cos45 0; |
(5) |
Fi z |
0; Qcos45 S6 S5 cos60 0. |
(6) |
Решив уравнения (4), |
(5), (6) и учитывая, что S2 245 H, найдем |
S4 71,05 H , S5 281,6 H , |
S6 40,8 H . Знаки показывают, что стержень |
6 сжат, а остальные растянуты.
46
Ответ: S1 273 H ; S2 245 H; S3 245 H
S4 71,05 H ; S5 281,6 H ; S6 40,8 H .
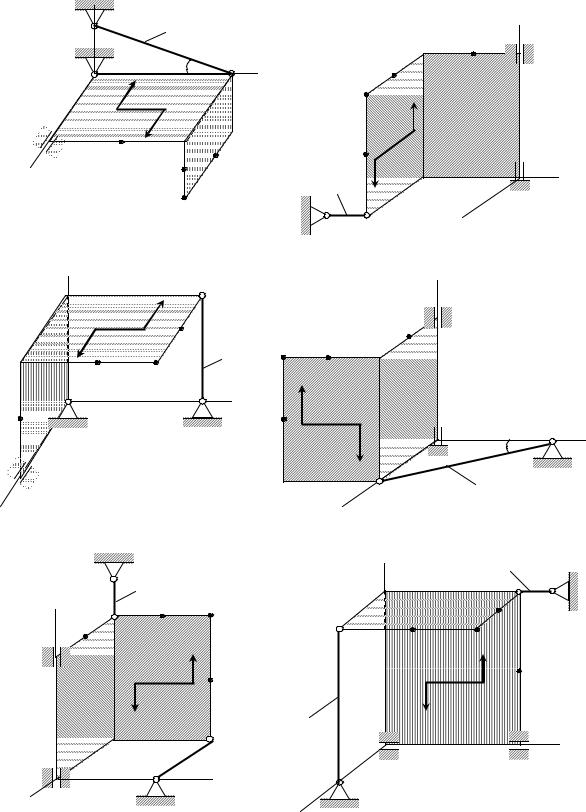
Задание 4.
Две однородные прямоугольные плиты жестко соединены под прямым углом и закреплены в точке А сферическим шарниром, в точке В цилиндрическим шарниром и невесомым стержнем 1. Стержень соединен с плитой и опорой шарниром. Вес большей плиты P1, меньшей – P2 . На
плиту действует сила F и пара сил с моментом M (прил. 2, задание 4, рис. 3).
Дано: P1 2 кH ; |
P2 1кH ; |
M 2 кH м; |
F 4 кH; |
60 ; |
a 0,4 м ; |
CH HД . |
|
|
|
|
|
Вектор силы F находится в плоскости, параллельной плоскости ZBX. Требуется определить реакции в точках А, В и усилие в стержне 1. Решение.
За объект равновесия примем конструкцию жестко соединенных плит. Строим расчетную схему (прил. 2, задание 4, рис. 4). На конструкцию действуют заданные силы P1, P2 , F и пара с моментом M, а также реакции
связей. Реакцию сферического шарнира задаем тремя составляющими X A,
Y A, Z A , цилиндрического – двумя составляющими Z B , Y B , реакцию
стержня S1 направляем по стержню от объекта равновесия. Получим произвольную пространственную систему, для которой можем составить шесть уравнений равновесия. Fi x 0; Fi y 0; Fiz 0 ; M x Fi 0;M y Fi 0 ; M z F i 0.
Задача статически определимая, так как число неизвестных не пре-
вышает шести. |
|
|
|
|||||||
Составим уравнения. |
|
|||||||||
Fi x |
0; X A F cos 0; |
(1) |
||||||||
Fi y |
0; YA YB |
0 ; |
(2) |
|||||||
Fi z |
0; ZA P1 |
P2 S1 F sin ZB 0 ; |
(3) |
|||||||
M x |
|
|
|
i 0 |
; P1a S1 2a F sin 2a 0; |
(4) |
||||
F |
||||||||||
M y |
|
|
i 0 |
; P1a P2a S1 2a F sin a F1 cos a ZA |
2a 0; (5) |
|||||
F |
||||||||||
M z |
|
i 0; YA 2a M F cos 2a 0. |
(6) |
|||||||
F |
||||||||||
47
Для определения момента силы F относительно осей разлагаем ее на составляющие F cos и F sin и применяем теорему Вариньона.
Подставив в составленные уравнения числовые значения всех данных величин и решив эти уравнения, найдем искомые величины.
Ответ: ХА = 2 кH; YA = 0,6 кH; YB = –0,6 кH; ZA = –2,24 кH; ZB = 4,24 кH;
S1 = –4,48 кH.
Знак минус указывает на то, что реакции Z А и S 1 направлены противоположно показанным на рисунке.
Контрольные вопросы к защите заданий 3 и 4.
1.Условия равновесия сходящейся системы сил в пространстве.
2.Условия равновесия произвольной пространственной системы сил.
3.Момент силы относительно точки и оси.
48
ПРИЛОЖЕНИЯ
Приложение 1. Образец оформления титульного листа
Министерство образования РФ Владимирский государственный университет
Кафедра теоретической механики
Курсовая работа
Определение реакций связей Задания: 1, 2, 3, 4
Выполнил студент гр. ЗТ-2002 И.И. Иванов
Принял преподаватель И.П. Сидоров
Владимир 2002
49