

Курсач / Курсовая 1
.docxМинистерство образования и науки Российской Федерации
Федеральное государственное автономное образовательное учреждение высшего образования
«Национальный исследовательский Томский политехнический Университет»

Инженерная школа энергетики
Отделение электроэнергии и электротехники
13.03.02 «Электроэнергетика и электротехника»
Рычажный механизм
Задание 1
Вариант 9
по дисциплине:
Механика 1.2
Исполнитель:
|
|
||||
студент группы |
5А21 |
|
Кулешов К.Д |
|
30.03.2024 |
|
|
|
|
|
|
Руководитель:
|
|
||||
преподаватель |
|
|
Горбенко М.В. |
|
|
|
|
|
|
|
|
Томск – 2024
Задача
Согласно техническому заданию, необходимо выполнить:
Структурный анализ механизма.
Кинематический анализ механизма.
Силовой расчет механизма c учетом веса звеньев и сил инерции.
Определение уравновешивающего момента методом «рычага Жуковского».
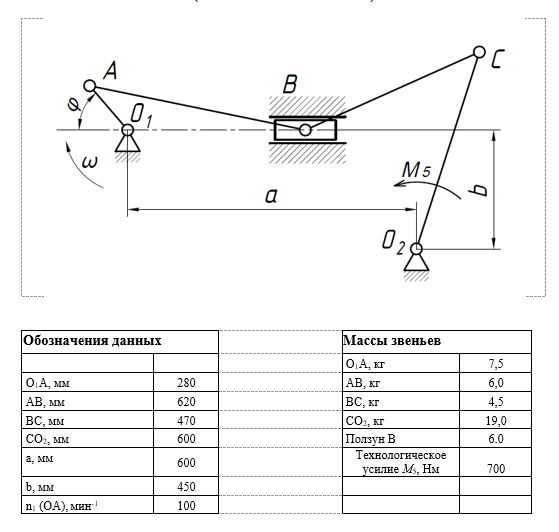

Рис.1 – План механизма

Рис.2 – 12 положений механизма
Структурный анализ механизма
0 – стойка
1 – кривошип
2 – шатун
3 – ползун
4 – шатун
5 – коромысло
Кинематические пары:
Точка |
Движение |
Классификация |
Класс |
O1: |
В0,1 |
низшая |
Р5 |
A: |
В1,2 |
низшая |
Р5 |
О2: |
В3,0 |
низшая |
Р5 |
С: |
В4,5 |
низшая |
Р5 |
B: |
В2,3 В3,4 П0,3 |
низшая низшая |
Р5 Р5 |
Схема |
Название |
Число кинематических пар |
Формула строения |
|
|
Начальный вращательный механизм первого класса |
1 |
В0,1 |
|
|
Группа Ассура второго класса, второй вид |
3 |
В1,2 – В2,3 – П3,0 |
|
|
Группа Ассура второго класса, первый вид |
3 |
В3,4 – В4,5 – В5,0 |
|



Структурная формула:
В0,1 – [В1,2 – В2,3 – П3,0] – [В3,4 – В4,5 – В5,0]
Степень подвижности механизма: W = 3 * 5 – 2 * 7 – 0 = 1
2) Кинематический анализ
Линейные скорости всех точек механизма и угловые скорости звеньев методом планов.
Вычисляем скорость точки А звена 1 при заданном положении механизма:

Строим
план скоростей (рис.3). Выбираем масштабный
коэффициент плана скоростей μv
= 0.05
 .
Из произвольно выбранного полюса pv
проводим луч pva,
изображающий в выбранном масштабе
скорость точки А (рис.3):
.
Из произвольно выбранного полюса pv
проводим луч pva,
изображающий в выбранном масштабе
скорость точки А (рис.3):

Для определения скорости точки B, рассмотрим ее движение относительно точек А и B0. Скорость B0 равна нулю, поэтому на плане скоростей она будет находиться в полюсе pv. Составим систему уравнений, описывающих движение точки B:

Вектор
скорости
 направлен перпендикулярно отрезку АB,
а вектор скорости
направлен перпендикулярно отрезку АB,
а вектор скорости
 ,
направлен параллельно оси движения
ползуна. Проводим луч pvb
из полюса вдоль направления
.
Из точки а вдоль
проводим луч ab.
На получившемся пересечении ставим
точку b
(рис.3).
,
направлен параллельно оси движения
ползуна. Проводим луч pvb
из полюса вдоль направления
.
Из точки а вдоль
проводим луч ab.
На получившемся пересечении ставим
точку b
(рис.3).


Угловая
скорость второго звена:

Для определения скоростей в C необходимо составить систему уравнений:

Скорость
 =0
т.к. стойка O2 неподвижна.
=0
т.к. стойка O2 неподвижна.
Вектор скорости
 направлен перпендикулярно отрезку BC,
а вектор скорости
направлен перпендикулярно отрезку BC,
а вектор скорости
 направлен перпендикулярно отрезку CO2
направлен перпендикулярно отрезку CO2


Угловая скорость четвертого звена:

Угловая скорость пятого звена:

Построение плана ускорений
Линейные ускорения точек механизма и угловые ускорения звеньев методом планов.
Определяем ускорение точки А при помощи теоремы об ускорениях точек плоской фигуры:

Ускорение О равно нулю, т.к. точка
неподвижна. Звено вращается равномерно,
поэтому
 .
Следовательно
.
Следовательно

Вектор направлен параллельно OA
от А к О. Строим план ускорений. Выбираем
масштаб плана ускорений μa
= 0.5
 .
.
Из произвольно выбранного полюса pa
проводим луч paa,
изображающий в выбранном масштабе
ускорение точки А (рис.4).

Для определения ускорения точки B, рассмотрим движение этой точки относительно точек A и B0, на плане ускорений точка B0 находится в полюсе pa. Составим систему уравнений, описывающих движение точки B:

Вектор нормального ускорения точки B, возникающий при рассмотрении движения относительно точки A, направлен параллельно AB от точки B к точке A. Величина этого ускорения равна:

На плане ускорений из точки a провести отрезок an1, показывающий направление и величину нормального ускорения точки B относительно точки A. Длина отрезка an1 с учетом масштабного коэффициента:

Вектор тангенциального ускорения точки B в ее движении относительно точки A направлен перпендикулярно к звену AB. Кориолисово ускорение точки B отсутствует, так как отсутствует вращательное движение точки B, релятивное же ускорение точки B в свою очередь направленно параллельно движению ползуна и находится из плана ускорений, и равно:

Зная длины найдем тангенциальное ускорение и полное ускорение В.



Определим угловое ускорение звена 2:

Для того, чтобы определить ускорение точки C, необходимо рассмотреть движение относительно точек B и O2. Составим систему уравнений:

Точка
О2 находится в полюсе. Нормальное
ускорение
 направлено вдоль CB
к точке B,
а нормальное ускорение
направлено вдоль CB
к точке B,
а нормальное ускорение
 направленно вдоль CO2
направленно вдоль CO2


Нормальное ускорение равно


Из плана ускорений находим:





Угловое ускорение звена 4 будет направлено против часовой стрелки относительно точки B.
3) Силовой расчет механизма c учетом веса звеньев и сил инерции
Моменты инерций стержней:



Знак
“ - “ означает то, что момент инерции
направлен в противоположную от углового
ускорения сторону.
 ,
т.к. звено движется поступательно, и
,
т.к. звено движется поступательно, и
 ,
т.к.
,
т.к.
 и
и

Вес звеньев:





Силы инерций:





Знак “ - “ означает то, что сила инерции направлена в противоположную от ускорения точки сторону.
Центры масс звеньев находятся на середине стержней, т.к. они однородные. Находим их ускорения из плана ускорений:
К звеньям группы (рис.3) приложены: F5, G5, G4, Fi5, Fi4, Mi4 и силы реакций во внешних кинематических парах R5,0 и R4,3, разложенную на нормальную и тангенциальную составляющие. Кинематическая пара 5,0 – поступательная, значит сила реакции будет направлена перпендикулярно движению звена 5 через центр шарнира B. Кинематическая пара 3,4 – вращательная, поэтому реакция будет проходить через центр шарнира C.

Рис.3 – Схема нагружения группы 4-5
Записываем уравнение равновесия группы в форме сил:

Чтобы найти тангенциальную составляющую R4,3, составим уравнение моментов сил относительно точки C, т.к. система находится в равновесии, то сумма моментов должна равняться нулю.

где μ = 0,004 – масштабный коэффициент, hG4, hi4 – плечо силы, определяемое по чертежу.

Чтобы найти тангенциальную составляющую R5,0, составим уравнение моментов сил относительно точки C, т.к. система находится в равновесии, то сумма моментов должна равняться нулю.

где μ = 0,004 – масштабный коэффициент, hG4, hi4 – плечо силы, определяемое по чертежу.

Стоится
план сил в масштабе
 (рис.7), из которого находится значение
R4,3
=1119.8 Н.
(рис.7), из которого находится значение
R4,3
=1119.8 Н.

Рис.4 – Схема нагружения группы Ассура 2-3
На рис.4 представлена группа Ассура 2-3, к звеньям которой приложены: G3, G2, Mi2, Fi3, Fi2, R0,3 , R3,4 = R4,3 по модулю и противоположна по направлению, силы реакций во внешних кинематических парах R0,3 и R2,1, разложенные на нормальные и тангенциальные составляющие, но R0,3 может быть направленна лишь перпендикулярно плоскости движения, а значит раскладывать ее на составляющие нет смысла. Для начала определим точку приложения R0,3 для этого составим уравнение моментов звена 3


Так
как если
 ,
то и
,
то и

Теперь составим уравнение равновесия группы 2-3 в форме сил

Чтобы найти тангенциальную составляющую, составим уравнение моментов для второго стержня относительно точки B

где μ = 0,004 – масштабный коэффициент, hG2, hi2, – плечо силы, определяемое по чертежу.

Стоится
план сил в масштабе
 (рис.9), из которого находится значение
R2,1
= 1060.65 Н.
(рис.9), из которого находится значение
R2,1
= 1060.65 Н.
К звену 1 (рис.5) приложены: F, G1, Fi1, R1,2 = R2,1 по модулю и противоположна по направлению и сила реакции во внешней вращательной кинематической паре R1,0, проходящая через центр шарнира O.
Записываем равновесие группы в форме сил:

Чтобы найти движущую силу, запишем уравнение моментов относительно точки O:

где h8 – плечо силы, определяемое из чертежа.

Стоится план сил в масштабе (рис.11), из которого находится значение R1,0 = 199.05 Н.

Рис.5– Схема нагружения группы 1-0
4) Определение уравновешивающего момента методом «рычага Жуковского»
Замена моментов инерций на пары сил:




Повернув план скоростей на 90°, расставляем силы инерций и веса звеньев, причем пары сил приложены к концам звеньев, на которые действует замененный момент. Приняв повернутый план скоростей за твердое тело, составляем уравнение равновесия относительно полюса.


Расхождения в значениях величины уравновешивающей силы, полученных из плана сил и рычага Жуковского:

Движущий момент:
