

4 курс / Лучевая диагностика / ПРИМЕНЕНИЕ_КИЛОВОЛЬТНОГО_РЕНТГЕНОВСКОГО_ИЗЛУЧЕНИЯ_ДЛЯ_ПЛАНИРОВАНИЯ
.pdfЛокализация мишени определяется по костным ориентирам или имплантированным маркерам. Эти системы создают в пациенте относительно малую дозу порядка 0,5 мГр. Недостатком системы является невозможность получения томографического изображения. При отсутствии 3D-верификации положения мишени, невозможно провести количественное определение деформации опухоли или органа и оценить изменения в объеме. В настоящее время существуют две подсистемы визуализации, интегрированные с облучающим аппаратом. Это система Novalis ExacTrac® 6-D X-ray фирмы BrainLAB и система CyberKnife фирмы
Accuray. Название “6-D” указывает на возможность движения стола по 6 степеням свободы: 3 степени линейные и 3 степени вращательные.
Novalis ExacTrac 6-D X-ray (рис. 6.3) объединяет ЛУЭ с системой рентгеновского контроля положения мишени, коррекции укладки и осуществления высокоточного стереотаксического облучения. Дополнительно применяется подсистема с инфракрасным (ИК) излучением, которая следит за положением пациента в реальном времени и состоит из двух ИК-камер и одной видеокамеры. Две рентгеновские трубки вделаны в пол и проектируют изображения на противолежащие плоские детекторные панели размером 20×20 см2, которые укреплены на потолке. Расстояние от трубки до противолежащей панели детекторов составляет около 360 см. Расстояние от каждой трубки до изоцентра ЛУЭ составляет 234 см.
Правильное определение мишени требует калибровки пространственного соотношения рентгеновских трубок, детекторов и изоцентра ЛУЭ. Положение в пространстве относительно изоцентра устанавливается с применением калибровочного фантома с внутренними контрастными маркерами для получения рентгеновского изображения и внешними маркерами, отражающими ИК-излучение при слежении по ИК-датчику.
Главной функцией двух ИК-камер является детектирование в реальном времени положения отражающих маркеров, расположенных на больном или на референсной рамке, прикрепленной к столу. Конфигурация маркера автоматически сравнивается с сохраненной референсной информацией. Затем программа дает указание, как движением стола переместить больного в положение, которое было при планировании. Далее
121

получают рентгеновские проекции и окончательно определяют положение больного путем совмещения костных или имплантированных маркеров с их положением, полученным из реконструкций в планирующей системе.
Роботизированная система CyberKnife®. (рис. 6.4) проводит облучение с использованием тормозного излучения 6 МВ линейного ускорителя, у которого радиационная головка подвешена на роботизированном штативе (robotic arm). Здесь нет механического изоцентра, как у обычных ЛУЭ. Подобно ExacTrac 6D, система CyberKnife снабжена подсистемами планирования и получения кВ-изображения для проведения ЛТКИ. Подсистема визуализации состоит из двух кВ источников и двух панелей детекторов. Рентгеновские трубки фиксированы на потолке, а приемники изображения установлены на полу с противоположной стороны от стола. В новых системах детекторные панели углублены под полом, что создает большее пространство для движения гантри (рис. 6.4б).
а |
б |
Рис. 6.4. Система контроля по изображению аппарата CyberKnife с двумя детекторами, прикрепленными (a) над полом и (б) под полом. Рентгеновские трубки укреплены под потолком
122
Центральные оси подсистем перпендикулярны друг другу и пересекают больного симметрично под углом 45º относительно средней сагиттальной плоскости. Эти линии пересекаются приблизительно в «виртуальном изоцентре» облучающей системы, который соответствует положению облучаемой области. В качестве приемников изображения применяют плоские панели из аморфного кремния размером 41×41 см и 1024×1024 пикселей. Источники находятся на расстоянии около 225 см от виртуального изоцентра и на расстоянии 345–365 см от панели детекторов. Рентгеновские трубки работают в импульсном режиме при напряжении 100–125 кВ в режиме до 90 мАс в зависимости от анатомической области, в которой расположена облучаемая мишень.
Опции облучения по методу слежения за дыханием (Respiratorytracked treatment) и контроля являются частью интегрированной системы. В отличие от других современных систем, CyberKnife передвигает пучок, чтобы компенсировать движение мишени, а не включает и отключает пучок, когда мишень оказывается на пути пучка. Система визуализации объединена с планирующей системой и позволяет совмещать реконструкции, рассчитанные при КТисследованиях с ортогональными изображениями, полученными в аппаратной.
Киловольтные системы, установленные на гантри аппарата (бортовые)
Система крепится к штативу аппарата, обычно перпендикулярно центральной оси облучающего пучка. Могут быть установлены одна или две системы визуализации. КВ-система движется при вращении гантри вокруг того же изоцентра, что и МВ-пучок. Этот тип систем можно использовать для получения снимков, флюороскопических изображений, а также томограмм.
Бортовые устройства кВ-визуализации являются отличительной особенностью новых медицинских ЛУЭ, ориентированных на применение ЛТКИ, в основном благодаря возможности получения томографического изображения в лечебном положении пациента. Два коммерческих продукта – это Synergy X-Ray Volume Imaging
фирмы Elekta и On-Board Imager (OBI) фирмы Varian, совершенно одинаковы по конструкции и управлению. Система получения кВизображений крепится на гантри перпендикулярно системе получения МВ-портального изображения, с использованием одного
123
изоцентра. Преимуществом ортогонального размещения является то, что поле видимости кВ-системы никогда не перекрывается радиационной головкой аппарата. Это гарантирует возможность создавать изображение пациента независимо от угла поворота гантри. Ограничения такой конфигурации заключаются в возможности столкновения при некоторых комбинациях углов поворота стола и гантри и в неточном совпадении изоцентров кВ и МВ-пучков. В обеих системах применяется КТ в конусном пучке, что дает контрастное изображение при локализации мишени в мягких тканях и позволяет применять КТ-числа для прямого вычисления доз.
Опубликовано много работ по применению плоских детекторных панелей для получения изображений при конКТ, в которых определяли эффективность детекторов, задержку сигнала, рассеяние рентгеновского излучения и др. [8]. В настоящее время считается, что наиболее важными факторами, влияющими на КТ в коническом пучке, являются
1.Ограниченный динамический диапазон детекторов кВизлучения,
2.Увеличение количества рассеянного излучения при больших углах конуса и размере объекта,
3.Движение больного во время сканирования.
Несмотря на это, качество получаемых изображений вполне удовлетворительно для клинического использования конКТ для ЛТКИ.
Система Synergy® (рис. 6.5) использует источник кВ-излучения, который поддерживается двумя рельсами, которые можно убрать вручную внутрь под покрытие гантри аппарата, чтобы не мешать укладке больного. Вторая убираемая подставка, укрепленная на поверхности барабана гантри, поддерживает панель детекторов размером 41×41 см (1024×1024 пикселей) на расстоянии источник– детектор 155 см. Эта подставка сконструирована так, что она позволяет сдвигать панель вбок до 19 см относительно центральной оси кВ-пучка. Боковое смещение применяется для увеличения размера объема реконструкции в боковом направлении. Детекторная панель (imager) может находиться в трех положениях: возвращенное в «собранное положение», выдвинутое наполовину и выдвинутое полностью. В собранном виде панель зафиксирована в
124

вертикальном положении для минимизации движений во время поворота гантри.
КонКТ работает по тем же принципам, что и обычная КТ, но имеет преимущество в возможности применения большего размера поля обзора в продольном направлении при использовании одного поворота. Для уменьшения вклада рассеянных фотонов применяется отсеивающая решетка 10:1 и программа внесения поправки с применением полуэмпирического распределения рассеянного излучения.
Рис. 6.5. Аппарат SYNERGY. Система контроля состоит из рентгеновской трубки и детекторной панели, укрепленных на гантри ускорителя
Synergy создает все виды изображений и в плоскости, и при движении, и в объеме. Имеются программы для автоматической и ручной 2D и 3D регистрации изображений. Систему можно использовать для получения прерывистых изображений, которые позволяют оценить движение торакальной части тела при активном контроле за дыханием.
125

Время сканирования с одновременной реконструкцией составляет от 35 с для области головы и шеи при малом поле реконструкции и частичной ротации гантри, до 120 с для простаты при большом поле. Качество изображения достаточно высокое. Например, возможно определить локализацию предстательной железы при значении дозового индекса КТ (см. главу 7) равном около 3 сГр на изображение. Для других опухолей достаточно около 1 сГр для головы и шеи и 2 сГр для легких.
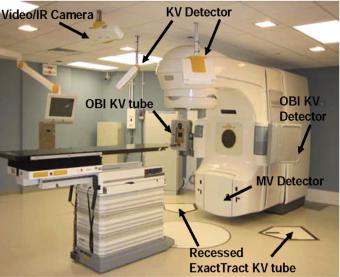
Рис. 6.6. Бортовая система контроля On-Board Imager (OBI)
Бортовая система OBI (рис. 6.6), состоит из двух роботизированных рук-подставок (EXaCT arms), которые держат рентгеновские трубки и детекторные панели размером 40×30 см (PaxScan 4030CB). Третья идентичная «рука» держит приемник МВ-изображения. Устройство PaxScan 4030CB imager изготовлено специально для получения изображения с помощью конКТ. Особенностью технологии OBI является применение электронных
126

серво-рук (servo arms) для поддержания стабильности оборудования. Измерения показывают, что изменение положения проекции металлического шарика, помещенного в изоцентре, при повороте гантри равно 0,3–0,8 мм в разных направлениях.
Система может работать в трех режимах: радиография, флюороскопия и конКТ. Флюороскопические и проекционные изображения на КТ получают при скорости 15 снимков/с. Система RPM respiratory gating применяется, когда используется контроль за дыханием и регулирует включение и выключение пучка в заданной фазе дыхательного цикла.
Рис. 6.7. Анализ двух ортогональных изображений в системе On-board Imager. Возможно применение автоматической и ручной регистрации. Цифровые реконструкции, а также контуры проекций объемов CTV, PTV или органов риска могут накладываться на ежедневные изображения
Получение изображения, регистрация и внесение поправки в позицию больного – все делается дистанционно. Система использует концепцию «укладочного поля», что позволяет подготовить систему КИ до прихода пациента. Укладочное поле
127
содержит все данные, необходимые для получения изображения (угол поворота гантри, референсные изображения, положение детекторов, тип необходимого изображения – снимок или конКТ и т.д.) и часть плана пациента. Все данные передаются в системы онкологической информации с использованием DICOM RT
В большинстве клиник для проведения ЛТКИ применяют режим рентгенографии. На рис. 6.7 показана пара ортогональных снимков. Автоматическая регистрация для анализа изображений является частью системы OBI, с алгоритмами для совмещения анатомии и/или контрастных маркеров. Определение положения контрастных маркеров можно провести вручную или с помощью программы. Исследования показали, что процесс репозиционирования с помощью OBI занимает ~ 4 минуты. Большинство времени тратится на анализ и обзор изображений, чтобы убедиться, что “автоматический” алгоритм дает правильный результат.
Смешанные (гибридные) системы
В них комбинированы системы крепления к потолку и полу и к гантри облучающего аппарата.
Разные типы изображений дают различные возможности для укладки и мониторинга положения больного. Например, томография дает высокое контрастное разрешение для 3D локализации мягких тканей при начальной укладке, но она непрактична для мониторинга движений между фракциями. На ортогональных кВ-снимках обычно плохо видны мягкие ткани, поэтому применяются контрастные маркеры. Однако рентгенографию можно использовать повторно для мониторинга движения между фракциями.
Флюороскопия хороша для кратковременного слежения за дыхательными движениями, в то время как при рентгенографии с целью длительного слежения используют режимы с низкой дозой. Различные возможности методов комбинируют в гибридных конфигурациях, которые состоят из разных систем получения изображения, а именно, кВ-КТ, укрепленного на гантри, и двойной системы, установленной на полу и потолке. Примером гибридной системы является установка NovalisTx™ , показанная на рис. 6.8,
которая объединяет системы Varian OBI и BrainLAB ExacTrac 6-D
128
для получения как 3D томографии, так и изображений в двух плоскостях.
Рис. 6.8. Гибридная система NovalisTx Hybrid
6.5. Тестирование кВ-систем
Приемо-сдаточные испытания (Acceptance Testing), тестирование перед началом клинического использования (сommisionning) и программа гарантии качества (ГК) – это три основные ступени, которые должны быть проведены после установки любой системы ЛТКИ до начала ее клинического применения [3]. Эти процедуры следует проводить под руководством квалифицированного физика при поддержке врачей и среднего персонала. Описанные системы кВ-визуализации состоят из комбинации известных технологий, таких как рентгеновские аппараты, КТ-сканеры, детекторные панели (кВ/МВ), и ЛУЭ. Критерии качества для этих технологий
129
описаны в литературе. Однако некоторые критерии могут изменяться в зависимости от клинических задач.
Вообще говоря, и оборудование и программное обеспечение влияют на качество изображения, точность определения мишени, дозу на изображение и последовательность операций, и должны быть тщательно проверены во время тестирования. Хотя все процедуры и методы измерений похожи на тесты, проводимые во время приемки и ГК, их количество, а также частота проведения и критерии допуска будут другими. Приемку проводят только однажды при установке оборудования, большой модернизации и/или ремонта. Полученные при приемке параметры можно использовать в качестве базовых для критериев ГК и для установления возможности клинического использования.
Приемо-сдаточные испытания
Первичной целью приемочных испытаний является проверка конфигурации, функционирования, сохранности и работоспособности составляющих системы по сравнению со спецификацией, подписанной при заключении договора о покупке и/или в документации об установке оборудования. Тестирование включает проверку следующих позиций, но не ограничивается ими:
•установка всего оборудования и программного обеспечения;
•функционирование каждой компоненты;
•соответствие параметров изображений измеренным величинам кВп, мАс и др.;
•параметры позиционирования (размер поля, положение рентгеновской трубки и детекторов);
•методы калибровки;
•свойства операционной и механической защиты;
•наличие опций получения изображений;
•свойства программного обеспечения, интеграция и точность;
•связь системы с информационной системой, ускорителями, устройствами для управления движением и др.;
•идентификация потенциальных ограничений и проблем.
130