

10843
.pdf151
опорного узла фермы (Н – высота колонны). На каждой станции, закрепив лимб, визировали при КЛ и брали отсчёты по горизонтальному кругу на левый край оголовка колонны ОЛК, на левый край опорного узла фермы ОЛФ, на правый край опорного узла фермы ОПФ и на правый край оголовка колонны ОПК .
Затем действия повторяли при другом положении вертикального круга (КП)
и выводили средние отсчёты ОЛКср, ОЛФср, ОПКср, ОПФср. По отсчётам при КЛ, КП и средним определяли отсчёты ОК = 0,5(ОЛК + ОПК) и ОФ = 0,5(ОЛФ + ОПФ) на вооб-
ражаемые осевые риски колонны и фермы. Были найдены разности этих отсчётов ОФ
смещению опорного узла фермы на оголовке колоны γ в угловой мере. По расстояниям Li от теодолита до колонны вычислялись величины смещений опорного узла фермы на оголовке колонны по формуле (112).
Результаты моделирования угломерного способа с использованием теодолита 4Т30П представлены в табл. 28. Здесь вычисленные значения с находятся в пределах 19,6 – 21,0 мм, а среднее значение с = 20,28 мм и отличается от истинного на 0,28 мм.
Т а б л и ц а 28
Результаты моделирования угломерного способа (теодолит 4Т30П)
Растояние L, м |
Положение |
круга |
|
ЛК |
|
|
ЛФ |
|
|
ПФ |
|
|
ПК |
|
|
γ |
|
C , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
мм |
||||
° |
´ |
´´ |
° |
´ |
´´ |
° |
´ |
´´ |
° |
´ |
´´ |
° |
´ |
´´ |
|
||||
|
|
|
|
|
|||||||||||||||
10 |
|
КЛ |
|
122 |
55 |
00 |
123 |
23 |
30 |
124 |
31 |
30 |
125 |
14 |
30 |
-0 |
07 |
15 |
-21,0 |
|
ср. |
|
302 |
59 |
00 |
303 |
26 |
45 |
304 |
35 |
45 |
305 |
17 |
45 |
-0 |
07 |
08 |
--20,7 |
|
(1Н) |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КП |
|
303 |
03 |
00 |
303 |
30 |
00 |
304 |
40 |
00 |
305 |
21 |
00 |
-0 |
07 |
00 |
-20,4 |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
15 |
|
КЛ |
|
125 |
44 |
30 |
126 |
03 |
00 |
126 |
48 |
00 |
127 |
16 |
00 |
-0 |
04 |
45 |
-20,7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ср. |
|
305 |
47 |
15 |
306 |
05 |
30 |
306 |
51 |
30 |
307 |
19 |
15 |
-0 |
04 |
45 |
-20,7 |
|
(1,5Н) |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КП |
|
305 |
50 |
00 |
306 |
09 |
00 |
306 |
54 |
00 |
307 |
22 |
30 |
-0 |
04 |
45 |
-20,7 |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20 |
|
КЛ |
|
6 |
14 |
00 |
6 |
27 |
00 |
7 |
02 |
00 |
7 |
22 |
00 |
-0 |
03 |
30 |
-20,4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ср. |
|
186 |
17 |
00 |
186 |
30 |
00 |
187 |
05 |
00 |
187 |
25 |
00 |
-0 |
03 |
30 |
-20,4 |
|
(2Н) |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КП |
|
186 |
20 |
00 |
186 |
33 |
00 |
187 |
08 |
00 |
187 |
28 |
00 |
-0 |
03 |
30 |
-20,4 |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
25 |
|
КЛ |
|
5 |
49 |
30 |
6 |
00 |
00 |
6 |
29 |
00 |
6 |
45 |
00 |
-0 |
02 |
45 |
-20,0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ср. |
|
185 |
52 |
30 |
186 |
03 |
30 |
186 |
31 |
00 |
186 |
48 |
00 |
-0 |
02 |
45 |
-20,0 |
|
(2,5Н) |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КП |
|
185 |
55 |
30 |
186 |
07 |
00 |
186 |
34 |
00 |
186 |
51 |
00 |
-0 |
02 |
45 |
-20,0 |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
30 |
|
КЛ |
|
6 |
25 |
00 |
6 |
34 |
00 |
6 |
56 |
30 |
7 |
10 |
00 |
-0 |
02 |
15 |
-19,6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ср. |
|
186 |
27 |
30 |
186 |
37 |
00 |
186 |
59 |
00 |
187 |
13 |
00 |
-0 |
02 |
15 |
-19,6 |
|
(3,Н) |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КП |
|
186 |
30 |
00 |
186 |
40 |
00 |
187 |
01 |
30 |
187 |
16 |
00 |
-0 |
02 |
15 |
-19,6 |
|
|
|
|
|||||||||||||||||
Моделирование угломерного способа с использованием электронного тахеометра SET530R выполнялось по аналогичной с теодолитом 4Т30П программе (рис. 103). Результаты моделирования представлены в табл. 29. Здесь вычислен-
152
ные значения с находятся в пределах 20,0 – 20,5 мм, а среднее значение с = 20,24 мм и отличается от истинного на 0,24 мм.
Т а б л и ц а 29
Результаты моделирования угломерного способа (тахеометр SET 530R)
Растоя- Lние, м |
Положение |
круга |
|
ЛК |
|
|
ЛФ |
|
|
ПФ |
|
|
ПК |
|
|
γ |
|
C , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
мм |
|
|
|
|
° |
´ |
´´ |
° |
´ |
´´ |
° |
´ |
´´ |
° |
´ |
´´ |
° |
´ |
´´ |
|
9,898 |
|
КЛ |
|
0 |
00 |
00 |
0 |
27 |
51 |
1 |
37 |
16 |
2 |
19 |
12 |
-0 |
07 |
02 |
-20,3 |
|
ср. |
|
180 |
00 |
02 |
180 |
27 |
48 |
181 |
37 |
20 |
182 |
19 |
8 |
-0 |
07 |
00 |
-20,2 |
|
(1Н) |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КП |
|
180 |
00 |
04 |
180 |
27 |
46 |
181 |
37 |
25 |
182 |
19 |
04 |
-0 |
06 |
58 |
-20,1 |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
15,023 |
|
КЛ |
|
359 |
59 |
59 |
0 |
18 |
03 |
1 |
03 |
48 |
1 |
31 |
14 |
-0 |
04 |
41 |
-20,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ср. |
|
179 |
59 |
51 |
180 |
18 |
03 |
181 |
03 |
52 |
181 |
31 |
22 |
-0 |
04 |
39 |
-20,4 |
|
(1,5Н) |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КП |
|
179 |
59 |
44 |
180 |
18 |
03 |
181 |
03 |
57 |
181 |
31 |
31 |
-0 |
04 |
37 |
-20,2 |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20,027 |
|
КЛ |
|
0 |
00 |
00 |
0 |
13 |
46 |
0 |
47 |
59 |
1 |
08 |
41 |
-0 |
03 |
28 |
-20,2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ср. |
|
180 |
0 |
03 |
180 |
13 |
46 |
180 |
48 |
00 |
181 |
08 |
43 |
-0 |
03 |
29 |
-20,3 |
|
(2Н) |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КП |
|
180 |
00 |
06 |
180 |
13 |
47 |
180 |
48 |
01 |
181 |
08 |
45 |
-0 |
03 |
31 |
-20,4 |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
24,981 |
|
КЛ |
|
0 |
00 |
00 |
0 |
10 |
56 |
0 |
38 |
26 |
0 |
55 |
00 |
-0 |
02 |
49 |
-20,4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ср. |
|
179 |
59 |
59 |
180 |
10 |
57 |
180 |
38 |
28 |
180 |
54 |
59 |
-0 |
02 |
47 |
-20,2 |
|
(2,5Н) |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КП |
|
179 |
59 |
59 |
180 |
10 |
58 |
180 |
38 |
30 |
180 |
54 |
59 |
-0 |
02 |
45 |
-20,0 |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
30,032 |
|
КЛ |
|
0 |
00 |
00 |
0 |
09 |
11 |
0 |
32 |
09 |
0 |
45 |
55 |
-0 |
02 |
17 |
-20,0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ср. |
|
180 |
0 |
02 |
180 |
09 |
14 |
180 |
32 |
07 |
180 |
45 |
54 |
-0 |
02 |
18 |
-20,1 |
|
(3Н) |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КП |
|
180 |
00 |
04 |
180 |
09 |
16 |
180 |
32 |
05 |
180 |
45 |
54 |
-0 |
02 |
18 |
-20,2 |
|
|
|
|
|||||||||||||||||
Для исследования фотографического способа было сфотографировано цифровым фотоаппаратом изображение оголовка колонны и опорного узла фермы (рис. 103). Эта фотография была выведена на экран монитора. Вначале обычной линейкой с миллиметровыми делениями были измерены непосредственно на экране расстояния l1 = 48,8 мм, l2 = 86,3 мм, l3 = 181,3 мм и l4 = 238,2 мм. Подсчитанная по формуле (111) величина смещения опорного узла фермы составила в масштабе снимка –9,7 мм (влево). Действительное смещение будет равно
400:(238,2-48,8)х9,7 = –20,5 мм.
Аналогичные измерения были произведены с помощью горизонтальной линейки на экране монитора. По полученным результатам l1 = 4,20, l2 = 6,02, l3 = 10,77 и l4 = 13,60 (в делениях линейки) было подсчитано смещение, которое в масштабе снимка составило –0,505. Действительное смещение будет равно
400:(13,60-4,20)х0,505 = –21,5 мм.
Наконец, третий способ измерений заключался в использовании программы, позволяющей фиксировать величину горизонтальных перемещений стрелкикурсора от начальной точки О (рис. 103). Подводя последовательно стрелкукурсор к точкам 1, 2, 3 и 4, читали на экране монитора значения расстояний , l2 , l3 и l4 в некоторых условных единицах. Такие измерения были выполнены в мас-
153
штабах снимка 25, 50, 75, 100, 150 и 200%, причем масштаб снимка не влияет на величину измеряемых расстояний (см. табл. 30). По результатам измерений были вычислены значения смещения с, которые оказались в пределах 20,1 – 21,3 мм, а среднее значение с = 21,2 мм отличается от истинного на 1,2 мм.
Т а б л и ц а 30
Определение с на фотографии по курсору при ширине колонны 400 мм
М-б,% |
l1 |
l2 |
l3 |
l4 |
(l2+ l3)/ 2 |
(l1+ l4)/2 |
c' |
c, мм |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
25 |
288 |
747 |
1965 |
2678 |
1356 |
1483 |
-127 |
-21,3 |
50 |
286 |
748 |
1966 |
2681 |
1357 |
1483,5 |
-126,5 |
-21,1 |
75 |
287 |
747 |
1965 |
2680 |
1356 |
1483,5 |
-127,5 |
-21,3 |
100 |
288 |
748 |
1966 |
2679 |
1357 |
1483,5 |
-126,5 |
-21,2 |
150 |
286 |
746 |
1965 |
2678 |
1355,5 |
1482 |
-126,5 |
-21,2 |
200 |
288 |
748 |
1966 |
2680 |
1357 |
1484 |
-127 |
-21,2 |
Проведенные исследования показали, что новые способы (лазернозеркальный, угломерный и фотографический) могут с успехом применяться для определения смещений опорных узлов ферм на оголовках колонн. Они дают практически одинаковые результаты, отличаются высокой точностью, производительностью и обеспечивают надежную безопасность работ.
В каждом конкретном случае, в том числе и в зависимости от состояния оголовка колонны (его нарушенности, см., например, рис. 101б), следует выбирать наиболее безопасный, наименее трудоёмкий способ определения смещений опорных узлов ферм, обеспечивающий необходимую точность измерений.
5.5. Определение стрелы прогиба конструкций
Определение стрелы прогиба ферм, балок покрытия, подкрановых балок и др. может осуществляться: геометрическим нивелированием; способом тригонометрического нивелирования; угломерным, фотографическим и лучевым способами; механическим способом с помощью прогибомеров.
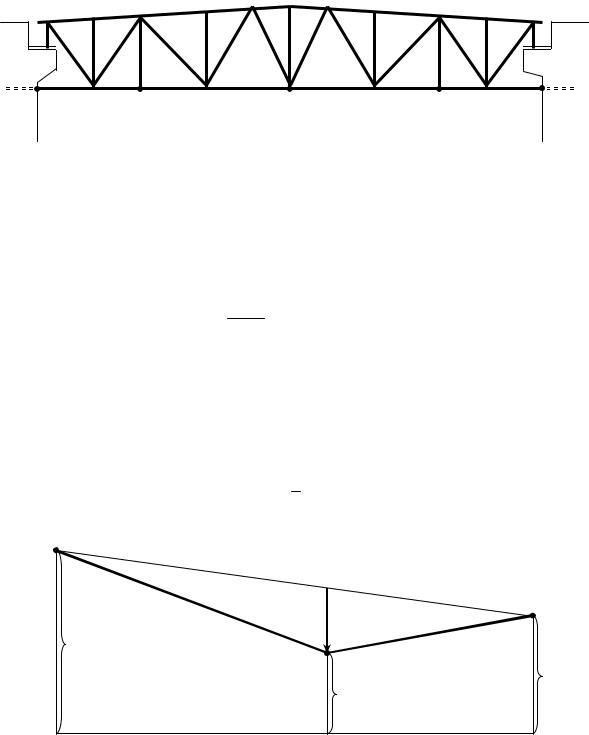
• Способ геометрического нивелирования (рис. 104) заключается в том, что нивелирная рейка последовательно прикладывается вертикально к нижней полке фермы (балки покрытия) нулем вверх вплотную к одной колонне (точка 1), затем в промежуточных точках (2, 3, 4) и вплотную к другой колонне (точка 5), а также устанавливается на подкрановую балку у каждой колонны и между колоннами. С помощью нивелира по рейке производят отсчёты. По этим отсчётам вычисляют стрелы прогиба конструкций [50] . Пример вычисления стрелы h прогиба правой
|
|
|
|
154 |
|
|
|
|
|
|
половины фермы одного из литейных цехов ОАО НАЗ «Сокол» (рис. 104) в точке |
||||||||||
4 относительно точек 3 и 5 приведен на рис. 105. |
|
|
|
|
||||||
1 |
2 |
|
|
3 |
|
|
|
|
4 |
5 |
|
Рис. 104. Пример конфигурации фермы и нивелируемые точки |
|
||||||||
Здесь О1, О2, О3 – |
отсчёты по рейке в нивелируемых точках, расстояние ме- |
|||||||||
жду которыми l1 и l2 . |
По этим данным стрелу прогиба h |
можно вычислить по |
||||||||
формуле (114), причем |
знак «плюс» у h означает прогиб конструкции выпукло- |
|||||||||
стью вниз, а знак «минус» - выпуклостью вверх: |
|
|
|
|
||||||
|
|
h = |
l1 (O −O )+(O −O ) |
. |
|
(114) |
||||
|
|
|
3 |
|
5 |
5 |
4 |
|
||
|
|
|
l1 +l2 |
|
|
|
|
|
|
|
По формуле (114) можно вычислить стрелу прогиба между любыми прони- |
||||||||||
велированными точками конструкции. При равенстве длин |
l1 и |
l2 формула (114) |
||||||||
упрощается и принимает вид: |
|
|
|
|
|
|
|
|
||
|
|
|
h = |
1 (O + O )−O |
|
|
(115) |
|||
|
|
|
|
2 |
3 |
5 |
4 . |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
h |
|
|
|
|
|
О3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
О5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
О4 |
|
|
|
|
|
|
l2 |
|
|
|
|
|
l1 |
|
|
|
Рис. 105. Схема к определению стрелы прогиба конструкции |
|||||||||
155
• Способ тригонометрического нивелирования предусматривает измере-
ния на нивелируемые точки угла наклона и наклонного расстояния. С помощью электронного тахеометра эта операция выполняется следующим образом. Прибор устанавливают в некоторой точке Т (рис. 106) и, визируя последовательно на точки 1, 2, 3, …, основания фермы, получают с помощью клавиши SDh на каждую наблюдаемую точку превышения h. По разности полученных превышений вычисляют стрелы прогиба конструкции.
а |
ферма |
1 |
б |
ферма |
|
|
2 |
|
S |
|
|
|
h |
|
|
|
|
|
|
Т |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
D |
|
|
4 |
|
тахеометр |
|
|
|
|
|
|
колонна |
5 |
Т |
колонна |
Рис. 106. Схема определения стрелы прогиба с помощью электронного тахеометра: ( а – вид сверху, б – вид сбоку)
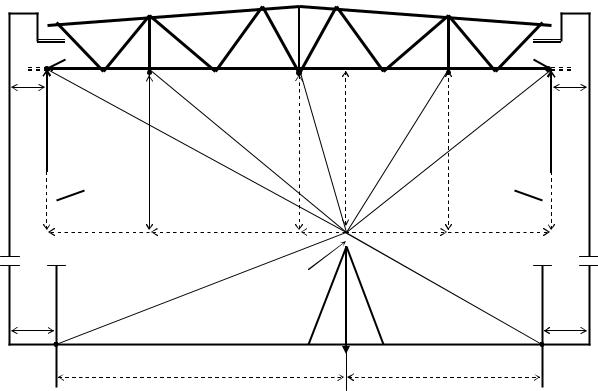
Другой способ использования электронного тахеометра предусматривает дискретное сканирование точек по вертикали. Для этого устанавливают на полу цеха тахеометр в произвольной точке Т, расположенной под фермой (рис. 107).
Наводят последовательно перекрестие сетки или лазерное пятно прибора на низ левой колонны НЛ , точки 1, 2, 3,… и низ правой колонны НП , получая с помощью клавиши SDh на каждую наблюдаемую точку горизонтальное проложение D и превышение h. По разности полученных превышений вычисляют стрелы прогиба фермы. А по разностям горизонтальных проложений от точки Т до верха D1 и низа DЛН левой колонны и до верха D5 и низа DПН правой колонны вычисляют крен КЛ и КП каждой колонны:
КЛ = (D1 + ЛВ) – ( DЛН + ЛН) ,
(116)
КП = (D5 + ПВ) – ( DПН + ПН) ,
где ЛВ , ЛН , ПВ , ПН – ширина колонны поверху и понизу, а по знаку разности судят о крене колонны влево или вправо.
156
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
3 |
4 |
|
|
|
5 |
||
|
|
|
|
|||||||||||
ЛВ |
|
|
|
|
|
|
|
|
|
ПВ |
||||
|
|
|
|
|
|
|
|
|
||||||
|
h1 |
h2 |
h3 |
hT |
h4 |
|
h5 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D1 |
|
D2 |
D3 |
|
D4 |
|
D5 |
||
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тахеометр |
|
ЛН |
|
Т |
ПН |
|
|
|
|
НЛ |
DЛН |
DПН |
НП |
Рис. 107. Схема одновременного определения вертикальности колонн и стрелы прогиба фермы путем сканирования точек в вертикальной плоскости
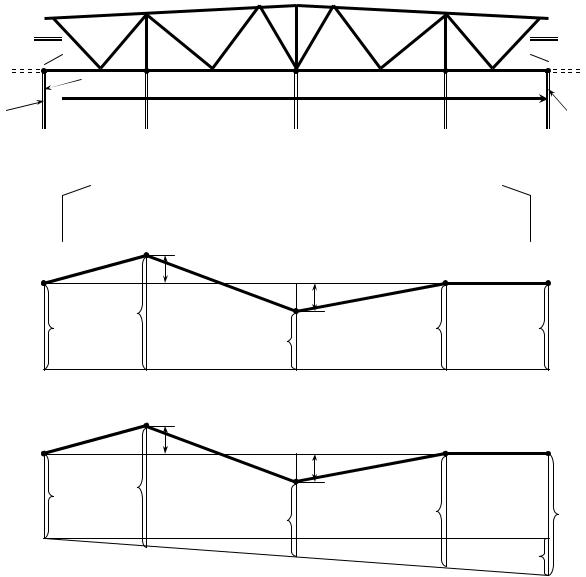
• Лучевой способ предусматривает задание створа вдоль нижнего пояса фермы с помощью лазерного пучка. Проще всего использовать для этой цели лазерную рулетку, закрепленную на колонне (рис. 108) и включенную на работу в непрерывном режиме, и нивелирную рейку.
Взяв отсчёт О1 по лазерному пятну на рейке, установленной нулем вверх, перемещают рейку в точку 5 и, наклоняя рулетку, добиваются совмещения лазерного пятна с отсчётом О5 , равным отсчёту О1 и фиксируют расстояние l5 от рулетки до рейки. Теперь лазерный пучок будет параллелен линии 1-5 .
Затем, прикладывая последовательно рейку к нижней полке фермы в точках 4, 3, 2 , берут отсчёты по рейке О4 , О3 , О2 , фиксируя одновременно расстояния от рулетки до рейки l4 , l3 , l2 . По отсчётам Оi можно вычислить стрелу прогиба hi для любой точки замера (рис. 108б):
hi = О1 – Оi , |
(117) |
причем знак «плюс» у hi означает прогиб конструкции выпуклостью вниз, а знак «минус» - выпуклостью вверх. В данном случае расстояния li не участвуют в вы-
157
числениях стрел прогиба. Они могут быть использованы, например, для построения профиля нижней полки фермы.
а
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
О1 |
|
1 |
рейка |
2 |
|
3 |
О4 4 |
|
|
|
|
5 |
||||||
|
|
|
|
О2 |
О3 |
|
О5 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||
лазерная |
|
|
l2 |
|
лазерный l3 |
пучок |
l4 |
|
l5 |
|
рейка |
||||||||
|
|
||||||||||||||||||
рулетка |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
Мостовой кран |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
h2 |
h4 = 0 |
|
|
|
h3 |
|
О2 |
|
О4 |
О5= О1 |
О1 |
О3 |
||
|
|
|
|
l2 |
l3 |
l4 |
l5 |
в |
|
|
|
|
|
h2 |
|
|
|
|
|
h3 |
|
|
О2 |
|
|
|
|
О1 |
О3 |
О4 |
|
|
|
О5 |
|||
l2 |
l3 |
l4 |
||
l5 |
||||
|
2 |
|
|
|
|
|
3 |
5=О1 – О5 |
|
|
|
4 |
Рис. 108. Схема лучевого способа определения стрелы прогиба
Вообще говоря, лазерный пучок может располагаться произвольно относительно линии 1-5 (рис. 108в). В этом случае в отсчёты по рейке Оi следует ввести поправки i :

158
i = |
li |
n , |
(118) |
|
ln |
||||
|
|
|
||
где n = О1 – Оn , а знак поправок соответствует знаку разности (О1 – |
Оn). |
|||
Тогда формула (117) примет вид: |
|
|
||
hi = О1 – (Оi + i). |
(119) |
|||
О1 |
О2 |
О3 |
О4 |
О5 |
Р |
|
|
|
Л |
Рис. 109. Схема фотографического способа определения стрелы прогиба
• Фотографический способ определения прогибов ферм перекрытий с применением цифровых фотоаппаратов, совместимых с компьютером, может выполняться следующим образом (рис. 109). Отмечают с помощью нивелира метками на колоннах положение произвольной горизонтальной референтной линии РЛ . В дальнейшем на фотографиях с помощью стрелки-курсора измеряют расстояния Оi от этой линии до нижнего пояса ферм, масштабируя снимки по вертикальным размерам элементов фермы.
В любом случае, измерив на фотографии отрезки О1 и О5 (рис. 108в) от произвольной референтной линии (нижний или верхний край фотографии), можно по формулам (118, 119) определить стрелу прогиба фермы в любом её месте, масштабируя снимок по горизонтальным и вертикальным размерам элементов фермы.
О примерах использования камеры UMK 10/1318 можно прочесть в [90, 95].

159
5.6. Геодезическая выверка колонн по вертикали
При определении вертикальности колонн, применяются различные способы [59]: тригонометрическое нивелирование; вертикальное проектирование с помощью теодолита верхней осевой риски колонны на уровень её нижней осевой риски; вертикальное проектирование с использованием рулеток или ЛЗУ; боковое нивелирование; использование приборов вертикального проектирования типа PZL; использование шнурового отвеса в сочетании с лазерной рулеткой; использование электронного тахеометра и др.
•Тригонометрическое нивелирование с использованием электронного та-
хеометра и его клавиши SDh выполняется по описанной выше схеме на рис. 107 и предусматривает определение горизонтальных проложений от точки стояния прибора до верха и низа колонны. Крен колонны вычисляют по формулам (116).
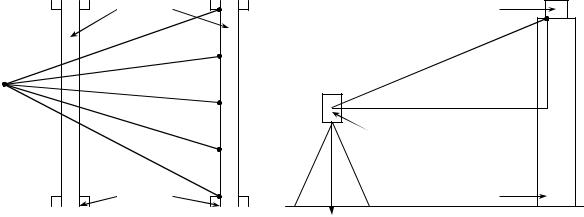
•Вертикальное проектирование с помощью теодолита, в зависимости от насыщенности производственных помещений технологическим оборудованием, выполняется следующим образом (рис. 110).
Первый способ (рис. 110а) применяется при наличии видимости верхней и нижней частей колонны с противоположной стороны цеха. Для его выполнения намечают верхнюю и нижнюю осевые риски колонны и с помощью теодолита проектируют при двух положениях вертикального круга КЛ и КП верхнюю осевую риску на уровень нижней. Расстояние между средней проекцией и нижней осевой риской дает линейную величину и направление крена Кизм.
а |
|
верхняя |
б |
|
|
|
в |
|
|
|
|
+ |
осевая |
+ |
в |
|
ЛВ |
+ |
ПВ |
в |
|
|
риска |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рейка |
|
|
рейка |
|
|
КЛ |
|
КП |
|
КЛ |
КП |
|
|
|
КЛ |
КП |
|
|
нижняя |
|
|
препятствие |
|
|
|
|
|
|
|
осевая |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
риска |
|
|
|
|
|
|
|
|
+ |
|
|
+ |
н |
ЛН |
|
+ |
ПН |
н |
|
Рис. 110. Определение вертикальности колонны с помощью теодолита
160
Если нижняя осевая риска закрыта препятствием (рис. 110б), то устанавливают теодолит на некотором расстоянии от оси колонны, обеспечивающем видимость рейки, приложенной к верхней и нижней осевым рискам. Визируют при двух положениях вертикального круга на некоторый (для удобства – кратный) отсчёт в верхней рейки, берут отсчёты при КЛ и КП по нижней рейке и выводят средний отсчёт н . Разность отсчётов н и в даст величину и направление крена колонны.
В том случае, когда препятствие большое, требуется использовать длинную рейку, которую с помощью Г – образного приспособления зацепляют за грань колонны (рис. 110в). Взяв отсчёты ЛВ , ПВ и в по верхней рейке и отсчёты ЛН , ПН и н по нижней рейке, вычисляют крен колонны:
Кизм = н – в – (ЛН – ЛВ + ПН – ПВ):2 . |
(120) |
Найденная величина крена Кизм может быть экстраполирована на всю высоту колонны Н по формуле:
К = КизмН/Низм , |
(121) |
где Низм – высота, на которой производились верхние измерения.
• Вертикальное проектирование с помощью теодолита и рулеток
применяется тогда, когда расстояния ЛВ – в (ЛН – н) превышают длину рейки. Такой способ позволяет определять одновременно вертикальность двух соседних колонн в ряду [21].
Его сущность поясняется рис. 111 и заключается в следующем. На высоте Низм натягивают между двумя соседними колоннами желобчатую рулетку, которая закрепляется на колоннах с помощью струбцин. Аналогичным образом закрепляется вторая рулетка на уровне пола цеха. Желобчатая рулетка в натянутом виде обеспечивает вертикальное положение её полотна. Одновременно с закреплением рулеток берут по ним отсчёты ЛВ1, ЛВ2, ПВ1, ПВ2 по верхней рулетке и ЛН1, ЛН2, ПН1, ПН2 по нижней рулетке.
Устанавливают теодолит между проверяемыми колоннами на противоположной стороне цеха в месте, обеспечивающем видимость шкал верхней и нижней рулеток. Визируют при двух положениях вертикального круга на некоторый отсчет ОВ верхней рулетки и берут по вертикальной нити сетки зрительной трубы при КЛ и КП отсчёты по нижней рулетке и выводят средний отсчёт ОН .
Крен Кизм левой или правой колонны в линейной мере равен разности расстояний (ВЛ – НЛ) , (ВП – НП) , где:
ВЛ = ОВ – (ЛВ1 + ЛВ2)/2 ,