

10363
.pdf41
42
4.4. Канонические уравнения метода перемещений
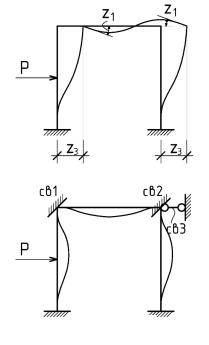
Основная система метода перемещений, как было показано выше, образуется из заданной путем введения в последнюю “n” моментных (угловых) и силовых (линейных) связей. Рассмотрим, например, статически неопределимую систему по рис. 4.5, находящуюся под действием внешней нагрузки. Введем в жесткие узлы заданной системы моментные связи 1 и 2, а для исключения линейного смещения узлов – силовую связь 3. Введение указанных связей превращает заданную систему в основную систему по методу перемещений. Из рисунка наглядно видно, что основная система по своему состоянию существенно отличается от заданной. Если в заданной системе от нагрузки жесткие узлы получают угловые смещения z1 и z2 и линейное смещение z3, то в основной системе эти перемещения равны нулю. Если в основной системе во вновь введенных связях 1, 2 и 3 возникают реакции от смещения этих связей и от нагрузки, то в заданной системе такие реакции равны нулю, т.к. в
заданной системе связи 1, 2 и 3 отсутствуют.
Для |
Рис 4.5 |
приведения работы основной системы к работе заданной, |
|
придадим вновь введенным связям 1, 2, …, n в основной системе перемещения zi такие, при которых реакции в этих связях, вызванные перемещениями их самих и внешней нагрузкой, были бы равны нулю, т.е.:
R1(z1, z2,..., zn , P) 0 ; R2 (z1, z2,..., zn, P) 0 ;
. . . . . . . . . . . . . . . . . . .
Rn (z1, z2,..., zn , P) 0 .
Используя принцип независимости воздействий, будем иметь:
R11 R12 ... R1n R1P 0;
R21 R22 ... R2n R2P 0;
. . . . . . . . . . . . . . . . . . . . . . .
Rn1 Rn2 ... Rnn RnP 0.
С учетом принципа пропорциональности Rik rik zk , где rik - удельная реакция в
связи i от смещения связи k на единицу (zk 1) , окончательно получим:
r11 z1 r12 z2 ... r1n zn R1P 0; r21 z1 r22 z2 ... r2n zn R2P 0;
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
rn1 z1 rn2 z2 ... rnn zn RnP 0.
43
Это и есть канонические уравнения метода перемещений, которые имеют статический смысл, так как выражают отсутствие реакций во введенных связях основной системы от перемещений самих введенных связей и от заданной нагрузки.
Неизвестными этих уравнений являются угловые и линейные перемещения узлов рамы. Коэффициенты при неизвестных – удельные реакции, - целесообразно разделить на
два вида:
|
|
l |
|
|
___ |
|
|
|
|
|
|
|
n |
|
|
|
* |
) |
2 |
|
|
|
|
- главные удельные реакции rii |
|
|
|
(Mi |
|
dS |
- |
всегда положительные; |
|||
|
|
|
|
|
|||||||
|
i 1 |
0 |
EI |
|
|
|
|
|
|||
|
|
|
|
|
l |
___ |
___ |
|
|
||
|
|
|
n |
|
|
* |
* |
|
|
||
- побочные удельные реакции |
rik |
0 |
Mi |
Mk |
dS |
- могут принимать произвольные |
|||||
|
|
||||||||||
|
|
|
i 1 |
|
|
EI |
|
|
|||
значения: меньше нуля, равны нулю и больше нуля.
Поскольку побочные удельные реакции на основании теоремы Релея обладают свойством взаимности, т.е. rik rki , то матрица, составленная из коэффициентов канонических уравнений, будет всегда симметрична относительно главной диагонали.
Свободные члены RiP уравнений представляют собой реакции во вновь введенных связях основной системы от действующей нагрузки и могут быть определены по формуле:
|
|
|
|
|
l |
___ |
|
|
|
|
|
|
n |
* |
0 |
|
|
|
|
|
RiP |
0 |
Mi MP |
dS . |
||
|
|
|
|
|||||
|
|
|
|
i 1 |
EI |
|
|
|
|
В приведенных выражениях удельных и грузовых реакций канонических |
|||||||
уравнений: |
|
|
|
|
|
|
|
|
|
___ |
___ |
|
|
|
|
|
|
- |
Mi* , |
Mk* - |
изгибающие моменты |
от единичных значений перемещений, |
||||
соответственно, связей i и k (zi 1, |
zk 1) |
в основной системе метода перемещений; |
||||||
- |
MP0 - изгибающий момент от заданной нагрузки в любой неизменяемой, в том числе и |
|||||||
статически определимой системе, полученной из основной системы метода перемещений с обязательным исключением связи i.
Если известны концевые усилия в стержневых элементах основной системы метода перемещений, возникающие от единичных кинематических воздействий и от заданной нагрузки, то удельные и грузовые реакции во вновь введенных связях чаще определяют из условий равновесия той или иной отсеченной части. При этом, если введенная в
жесткий узел связь моментная, то удельная реакция, возникающая в ней, определяется из условия равновесия самого узла. Реакция во введенной линейной связи определяется из условия равновесия отсеченной части рамы.
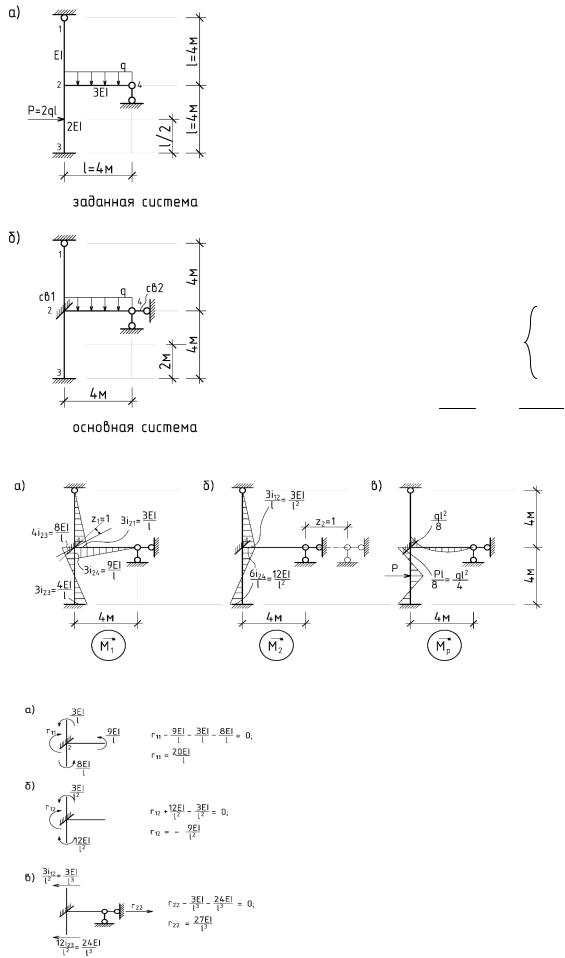
Пример. На рис. 4.6а показана заданная
система, |
находящаяся |
под |
действием |
||
сосредоточенной |
силы |
и |
равномерно- |
||
распределенной нагрузки по ригелю. |
Степень |
||||
кинематической |
неопределимости |
системы: |
|||
n 1 1 2. |
На рис. 4.6б показана основная |
||||
44
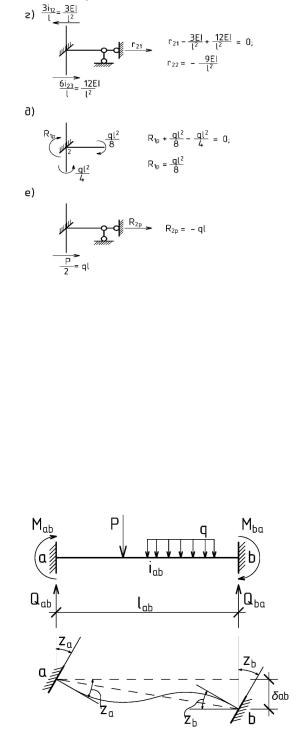
система метода перемещений. Построим в основной системе эпюры от единичных перемещений вновь введенных связей и от заданной нагрузки – см. рис. 4.7а, 4.7б и 4.7в.
Для определения удельных и грузовых реакций во вновь введенных связях (коэффициенты при неизвестных в канонических уравнениях метода перемещений и свободные члены) рассмотрим равновесия характерных узлов и отсеченных частей рамы – см. рис. 4.8. При этом, реакция во введенной связи будет считаться положительной, если ее направление совпадает с заданным направлением ее единичного перемещения.
После определения удельных и грузовых реакций, канонические уравнения примут вид:
5 EI Z1 0,5625 EI Z2 20 0;
0,5625 EI Z1 0,422 EI Z2 40 0.
Решение уравнений дает: Z1 7,842 ; Z2 105,26 .
EI EI
Рис 4.6
Рис 4.7 |
Далее для построения эпюры моментов |
||
|
в заданной системе может быть |
||
|
использовано два пути. Первый в общем |
||
|
виде аналогичен |
способу построения |
|
|
эпюры моментов, используемому в методе |
||
|
сил. В соответствии с принципом |
||
|
независимости действия сил будем иметь: |
||
|
___ |
___ |
___ |
|
MP M1* Z1 |
M2* Z2 |
... Mn* Zn MP* . |
По этому способу аналогично строятся и эпюры поперечных и продольных сил, т.е.
:
45
|
|
___ |
|
___ |
|
___ |
|
|
Q* |
|
Q |
P |
Q* Z |
1 |
Q* Z |
2 |
... Q* |
Z |
n |
; |
|
|
1 |
2 |
n |
|
P |
|
||||
|
|
___ |
|
___ |
|
___ |
|
|
|
|
NP |
N1* Z1 |
N2* Z2 ... Nn* Zn NP* . |
||||||||
Второй способ предполагает вычисление по соответствующим формулам концевых моментов и поперечных сил в каждом стержне заданной системы от найденных значений перемещений во вновь введенных связях и от действующей на рассматриваемый стержень внешней нагрузки.
Рис 4.8
4.5. Выражения концевых моментов и концевых поперечных сил в стержнях
рамы
Найденные из решения канонических уравнений значения неизвестных
Z1, Z2,...,Zn позволяют вычислить концевые реактивные моменты и поперечные силы, по которым с учетом значений моментов и поперечных сил от внешней нагрузки, построить эпюры моментов и поперечных сил в заданной системе.
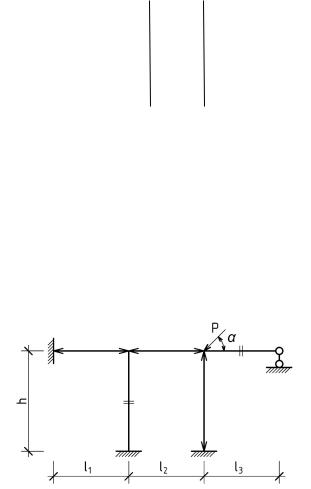
Стержень с жесткими узлами по концам (рис. 4.9).
M |
|
4 i |
|
Z |
|
2 i |
|
Z |
|
|
6 iab |
|
|
M |
* |
|
|||||||||
ab |
ab |
a |
ab |
b |
|
|
|
|
ab |
ab,P |
|||||||||||||||
|
|
|
|
|
|
|
|
|
lab |
|
|
|
|||||||||||||
|
|
2 |
EIab |
(2 Za Zb |
3 |
ab |
) Mab* |
,P |
; |
|
|||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
lab |
|
|
|
|
|
|
|
|
|
lab |
|
|
|
|
|
||||||
M |
|
4 i |
|
Z |
|
2 i |
|
Z |
|
|
6 iab |
|
|
M |
* |
|
|||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
ba |
|
|
ab |
|
|
b |
|
ab |
|
a |
|
|
lab |
ab |
|
ba,P |
|
|||||||
|
|
2 |
EIab |
(Za 2 Zb |
3 |
ab |
) Mba* |
,P . |
|
||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
lab |
|
|
|
|
|
|
|
|
|
lab |
|
|
|
|
|
||||||
Рис 4.9
Q |
|
|
6 iab |
Z |
|
|
6 iab |
Z |
|
|
12 iab |
|
|
Q* |
6 |
EIab |
(Z |
|
Z |
|
2 |
ab |
) Q* |
; |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
lab |
||||||||||||||||||||
|
ab |
|
|
lab |
a |
|
|
lab |
b |
|
|
lab2 |
ab |
ab,P |
|
|
lab2 |
a |
|
b |
|
|
ab,P |
|
||||||||||
Q |
|
|
6 iab |
Z |
|
|
6 iab |
Z |
|
|
12 iab |
|
|
Q* |
6 |
EIab |
(Z |
|
Z |
|
2 |
ab |
) Q* |
. |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
ba |
|
|
lab |
a |
|
|
lab |
b |
|
|
lab2 |
ab |
ba,P |
|
|
lab2 |
a |
|
b |
|
|
lab |
ba,P |
|
||||||||||
Стержень с одним жестким и другим щарнирным концом (рис. 4.10)

46
M |
|
|
3 i |
|
|
Z |
|
|
|
3 iab |
|
|
|
M* |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
ab |
|
|
|
ab |
|
|
a |
|
|
|
|
lab |
ab |
|
ab,P |
|
||||||||||
|
|
|
|
3 |
EIab |
(Z |
|
|
|
ab |
) M* |
; |
||||||||||||||||
|
|
|
|
|
lab |
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
lab |
|
|
|
ab,P |
|
||||||||
Mba |
0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Q |
|
|
|
3 iab |
Z |
|
|
3 iab |
|
|
|
Q* |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
ab |
|
|
lab |
|
|
|
a |
|
|
|
|
|
lab2 |
|
ab |
ab,P |
|
||||||||||
|
|
|
|
3 |
EIab |
(Z |
|
|
ab |
) Q* |
; |
|||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
lab2 |
|
|
|
|
|
|
a |
|
|
lab |
|
|
|
ab,P |
|
||||
Рис 4.10
Q |
3 iab |
Z |
|
|
3 iab |
|
|
Q* |
|
||||||
|
|
|
|
|
|
||||||||||
ba |
|
lab |
a |
|
|
|
lab2 |
ab |
ba,P |
|
|||||
|
3 |
EIab |
(Z |
|
|
ab |
) Q* |
. |
|||||||
|
lab2 |
|
|
||||||||||||
|
|
|
|
|
|
a |
|
lab |
|
ba,P |
|
||||
|
|
В приведенных выражениях M* |
|
|
и |
|
Q* |
,P |
соответственно значения концевого |
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ij,P |
|
|
|
|
|
|
|
|
ij |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
реактивного момента и поперечной силы в стержне ij |
от действующей на него внешней |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
нагрузки (по таблице 4.1). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
Построение эпюры продольных сил NP |
|
в заданной раме от нагрузки выполняют, |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
как правило, по эпюре поперечных |
сил |
|
|
|
QP , |
рассматривая |
равновесие |
характерных |
||||||||||||||||||||||||||||||||||||||||||||||||||
вырезанных узлов. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
Для рассмотренного выше примера будем иметь, например, значения реактивных |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
концевых моментов (индексы при неизвестных соответствуют номерам узлов рамы по |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
рис. 4.6а): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
M |
|
3 |
EI21 |
|
(Z |
|
|
21 |
) M |
* |
|
|
|
|
3 |
EI |
( |
7,842 |
|
105,26 |
|
) 0 25,61кН м |
; |
|
|
|
|
|||||||||||||||||||||||||||||||
21 |
|
l21 |
2 |
|
|
21,P |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
l21 |
|
|
|
4 |
|
|
|
|
EI |
|
4 EI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
M12 |
0; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
EI |
23 |
|
|
|
|
|
|
|
|
|
|
|
23 |
) M23* ,P 2 |
2EI |
|
|
7,842 |
|
|
|
|
105,26 |
|
10 42 |
|||||||||||||||||||||||||||||
M23 |
2 |
|
|
|
|
(2 Z2 Z3 3 |
|
|
|
|
|
|
|
(2 |
|
|
|
|
|
0 3 |
|
|
) |
|
|
|
23,261кН м; |
|||||||||||||||||||||||||||||||
|
l23 |
|
|
|
|
|
|
|
|
|
|
|
|
EI |
4 EI |
|
4 |
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l23 |
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
M32 |
2 |
|
EI |
23 |
|
(Z2 |
2 Z3 3 |
|
23 |
) M32* ,P |
2 |
|
2EI |
|
( |
7,842 |
|
2 0 3 |
105,26 |
) |
10 4 |
2 |
111,103кН м; |
|||||||||||||||||||||||||||||||||||
|
|
l23 |
|
|
|
|
|
4 |
|
EI |
|
|
|
|
4 EI |
|
4 |
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l23 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
M24 |
3 |
EI |
24 |
|
(Z2 |
|
|
24 |
) M |
24* ,P |
3 |
3EI |
|
( |
7,842 |
|
0) |
10 42 |
2,355кН м ; |
|
|
|
||||||||||||||||||||||||||||||||||||
|
l24 |
|
|
|
4 |
|
|
EI |
|
|
|
8 |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
l24 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
M42 |
0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
На рис. 4.11 по результатам приведенных |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вычислений |
показана окончательная эпюра |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
моментов в заданной системе. |
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис 4.11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

47
4.6. Расчет рам методом перемещений при узловой нагрузке
Рассмотрим статически неопределимую раму, находящуюся под действием узловой нагрузки – рис. 4.12. Канонические уравнения метода перемещений в общем случае при “n” неизвестных будут иметь вид:
r11 z1 r12 z2 ... r1n zn R1*P 0; r21 z1 r22 z2 ... r2n zn R2*P 0;
. . . . . . . . . . . . . . . . .
. . . . . . . . . . . .
|
|
|
Рис 4.12 |
|
|
r |
z |
r |
|
z |
2 |
... r |
z |
n |
R* |
0. |
|
||||
|
|
|
|
|
n1 |
|
1 |
n2 |
|
|
|
nn |
|
nP |
|
|
|||||
|
Во всех стержнях рамы значения концевых моментов от такого вида загружения |
||||||||||||||||||||
внешней нагрузкой будут равны нулю, т.е. Mab* |
,P |
Mba* |
,P 0. Следовательно, и реакции во |
||||||||||||||||||
введенных |
связях |
от |
внешней нагрузки |
|
также |
будут |
равны нулю, |
т.е. |
|||||||||||||
R* |
R* |
|
... R* 0. Тогда получим однородную систему канонических уравнений без |
||||||||||||||||||
1P |
2P |
|
nP |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
свободных членов: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
r11 z1 r12 z2 |
... r1n zn |
|
0; |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
r21 z1 r22 z2 |
... r2n zn |
0; |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
. . . . . . . . . . . . . . . . . . . . . . . . |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
rn1 z1 rn2 z2 |
... rnn zn |
0 |
|
|
|
|
|
|||||||
|
|
|
|
|
___ |
___ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
или в матричной форме: RZ Z RP P 0, где: |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
__ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RZ |
- |
квадратичная |
матрица порядка |
nхn, |
составленная |
из |
коэффициентов |
при |
|||||||||||||
неизвестных:
___
RZ
Z – матрица столбец неизвестных:
Z =
r11 |
r12 |
... |
r1n |
|
r21 |
r22 |
... |
r2n |
; |
. . . . . . . . . . . . . . . . . . .
rn1 |
rn2 |
... |
rnn |
Z1
Z2 ;
.....
Zn
48
___
RP - матрица столбец грузовых реакций от единичного варианта загружения:
|
___ |
|
|
R1P |
|
___ |
___ |
|
R 2P ; |
||
RP = |
||
|
..... |
|
|
___ |
|
|
R nP |
P – скаляр.
Из приведенных выражений видно, что при узловой передаче нагрузки в связи с нулевой матрицей столбцом грузовых реакций все неизвестные будут равны нулю, т.е.
Z1 Z2 ... Zn 0. При равных нулю неизвестных значения реактивных концевых моментов и поперечных сил в стержнях рамы также будут равны нулю. В этом случае стержни рамы будут работать только на центральное растяжение-сжатие, т.к. в них будут возникать только продольные силы.
Таким образом, стержни рамы при узловой передаче нагрузки работают как элементы фермы только на центральное растяжение или сжатие (см. рис.4.13).
Рис. 4.13
Задания для самостоятельной работы.
Литература: [1, гл. 6]; [2, гл. 7]; [4, гл. 5].
Вопросы для самопроверки:
1.Как определяется количество неизвестных в методе перемещений? 2.Какими гипотезами пользуются при расчете рам методом перемещений?
3.Каким требованиям должна отвечать основная система в методе перемещений? 4.На какие части можно разделить основную сиcтему метода перемещений и почему? 5.Из какого расчета получены табличные эпюры метода перемещений?
6.Как составляются канонические уравнения метода перемещений, и какие условия они выражают?
7.Каким образом строятся единичные эпюры и грузовая эпюра при расчете рам методом перемещений?
8.В чем заключается физический смысл коэффициентов при неизвестных в канонических уравнениях?
9.Как определяются реакции в связях, препятствующих угловым перемещениям? 10.Когда целесообразно определять коэффициенты канонических уравнений перемно-
жением эпюр?
11.Как проверить правильность вычисления коэффициентов канонических уравнений метода перемещений?
49
12.Почему статическая проверка является достаточной проверкой правильности построенных эпюр?
13.Каким образом выполняется деформационная проверка в методе перемещений? 14.Почему внутренние усилия при силовом воздействии не зависят от абсолютных
значений жесткостей, а определяются их соотношением? 15.Из каких этапов состоит алгоритм метода перемещений?
16.Какие сходства и различия имеют метод сил и метод перемещений? Какие величины являются неизвестными метода перемещений?
17.Что такое степень кинематической неопределимости?
18.Как определяется основная система метода перемещений?
19.В чем заключается сущность метода перемещений?
20.Как записывается система канонических уравнений метода перемещений
5. Использование свойств симметрии при расчете симметричных систем
Ранее, в п. 2.5.1, было дано определение симметричных систем. При этом было показано, что любую произвольную нагрузку, действующую на симметричную систему, всегда можно разложить на симметричную нагрузку и обратно симметричную (асимметричную).
Расчет симметричных систем при действии симметричной и асимметричной нагрузки целесообразно проводить с учетом свойств симметрии. Свойства симметрии симметричной системы напрямую зависят от вида загружения (симметричного или асимметричного).
Свойства симметричных систем при действии симметричной нагрузки
В симметричных системах при действии симметричной нагрузки деформации и характер распределения внутренних усилий симметричны.
Узлы поворота жестких симметричных узлов равны по величине и противоположны по знаку.
Линейные перемещения узлов системы возникают только в направлении, параллельном оси симметрии.
Линейные перемещения сечений, расположенных на оси симметрии системы,
возникают только в направлении оси симметрии.
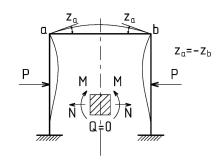
В поперечных сечения, расположенных на оси симметрии системы, возникают только симметричные внутренние усилия (см. рис. 5.1).
Рис. 5.1
50
Свойства симметричных систем при действии обратно симметричной нагрузки
В симметричной системе при действии обратно симметричной нагрузки деформации и характер распределения внутренних усилий обратно симметричный.
Узлы поворота жестких симметричных узлов системы равны по величине и по знаку.
|
Линейные |
перемещения узлов системы возникают только в направлении, |
ортогональном оси симметрии.
Линейные перемещения сечений, расположенных на оси симметрии системы,
возникают только в направлении, ортогональном оси симметрии.
В поперечных сечениях, расположенных на оси симметрии системы, возникают только обратно симметричные внутренние усилия (см. рис. 5.2).
Рис. 5.2
Используя рассмотренные свойства симметричных систем можно получить значительные упрощения их расчета при действии произвольной нагрузки. Метод расчета симметричных систем с учетом свойств симметрии называют комбинированным методом.
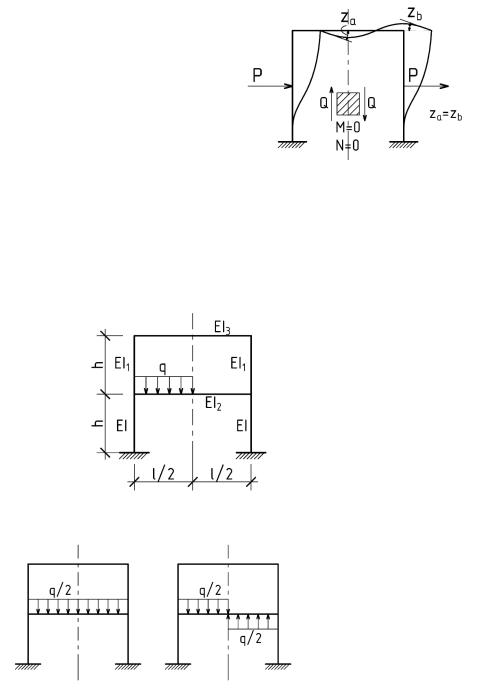
5.1. Комбинированный метод расчета
Рассмотрим симметричную систему, находящуюся под действием произвольной нагрузки (рис. 5.3). Разложим заданную нагрузку на
два вида - симметричную и обратно симметричную
(рис. 5.4).
Выберем основную систему при расчете рамы по методу сил от действия симметричной и обратно симметричной нагрузок (рис. 5.5).
Рис 5.3 |
Выберем основную систему при расчете рамы по методу |
|
|
|
перемещений от действия симметричной и |
|
обратно симметричной нагрузок (рис. 5.6). |
|
Анализ принятых двух основных систем для |
|
расчета рассматриваемой заданной системы |
|
представлен в таблице 5.1. |
|
Рис 5.4 |