

10190
.pdfМомент двигателя М. Зависимость момента двигателя М и мощности на валу P2 линейна (см. п. 5.2.5), поэтому с ростом нагрузки возрастает и момент двигателя.
Частота вращения n2 . При холостом ходе, когда P2 0 , частота вращения ротора n2 примерно равняется частоте вращения магнитного поля n2 n1 . С ростом нагрузки P2 частота вращения ротора уменьшается, причем в рабочей части механической характеристики эта зависимость остается линейной.
Скольжение S. При холостом ходе P2 0 , когда n2 n1 скольжение имеет минимальную величину. С ростом нагрузки частота вращения n2 линейно уменьшается, соответственно линейно увеличивается скольжение (5.2).
Коэффициент полезного действия . КПД определяется формулой:
|
|
P2 |
|
P2 |
|
, |
|
|
|
|
|||||
|
|
P |
P P |
||||
|
1 |
|
2 |
|
|
||
где P1 – активная мощность, потребляемая из сети; |
|||||||
P PM PЭ1 PЭ 2 Pмех Pдоб |
(кВт) – суммарные потери мощности, |
||||||
равные сумме потерь мощности в магнитопроводе PM , электрических потерь |
|||||||
в статоре PЭ1 и роторе PЭ 2 , механических потерь Pмех и добавочных потерь |
|||||||
мощности Pдоб . |
|
|
|
|
|||
При отсутствии нагрузки |
P2 0 КПД равен нулю. С увеличением |
||||||
нагрузки КПД растет и принимает наибольшее значение max 0,83 0,85 при
условии, |
что |
постоянные |
потери |
мощности |
в электродвигателе |
|||||
PM Pмех Pдоб |
оказываются |
равными |
переменным |
потерям мощности |
||||||
PЭ1 PЭ 2 |
в нем |
(при P2 PH |
). |
При |
дальнейшем |
росте нагрузки |
КПД |
|||
уменьшается. |
|
|
|
|
|
|
|
|
|
|
Коэффициент мощности |
cos |
: Характер |
зависимости |
cos |
||||||
определяется выражением: |
|
|
|
|
|
|
|
|||
|
|
cos |
|
P1 |
|
. |
|
|
|
|
|
|
|
|
U1I1 |
|
|
|
|||
|
|
3 |
|
|
|
|||||
При холостом ходе, когда P2 0 , cos достигает наименьшего значения |
||||||||||
cos 0 0,2 0,3 . |
С увеличением |
нагрузки cos увеличивается и достигает |
||||||||
91

при номинальной нагрузке P2 PH значения 0,83 0,89. С увеличением нагрузки больше номинальной наблюдается некоторое снижение cos за счет увеличения падения напряжения на индуктивном сопротивлении обмотки статора асинхронного двигателя.
5.3. Синхронный двигатель трёхфазного переменного тока
5.3.1. Устройство и принцип работы
Конструктивная схема трехфазного синхронного двигателя показана на рис. 5.18.
A(L1) |
|
B(L2) |
С( L3) |
|
2 |
|
|
RB |
|
3 |
|
|
+ |
|
OB |
n2 |
n1 |
||
|
||||
|
|
|
||
1 |
|
|
UB |
|
|
|
- |
||
|
|
|
Рис. 5.18 |
Синхронный двигатель (СД) состоит из неподвижной части 1, именуемой статором, и подвижной 3, именуемой ротором. Статор выполнен аналогично статору асинхронного двигателя. По окружности статора в пазах размещена трехфазная статорная обмотка 2, которая может быть соединена или в «звезду» U Л 380 B , или в «треугольник» U Л 220 B . На роторе
размещена обмотка возбуждения (ОВ), представляющая собой электромагнит постоянного тока и получающая питание от источника постоянного напряжения.
Если частота вращения ротора n2 1000 об/мин, то ротор выполняется в явнополюсном исполнении (рис 5.18), если же n2 1000 об/мин, то ротор выполняется в неявнополюсном исполнении.
При подаче к трехфазной обмотке статора трехфазного напряжения в ней образуется вращающееся магнитное поле с синхронной частотой вращения
|
n |
|
|
60 f1 |
(об/мин), |
(5.21) |
||
|
|
|
|
|||||
|
1 |
|
|
|
|
|
||
|
|
|
|
|
|
|
||
где f1 |
– частота питающей сети (Гц); |
|
||||||
– число пар магнитных полюсов, 1, 2, 3... |
|
|||||||
Вращающееся магнитное поле, взаимодействуя с однонаправленным |
||||||||
магнитным |
полем обмотки |
возбуждения, создает |
электромагнитный |
|||||
(вращающий) момент, который разгоняет ротор до частоты вращения |
||||||||
|
n |
|
n |
60 f1 |
, |
(5.22) |
||
|
2 |
|
||||||
|
|
1 |
|
|
|
|||
|
|
|
|
|
|
|
||
Так как частоты вращения магнитного поля и ротора одинаковы, двигатель называется синхронным.
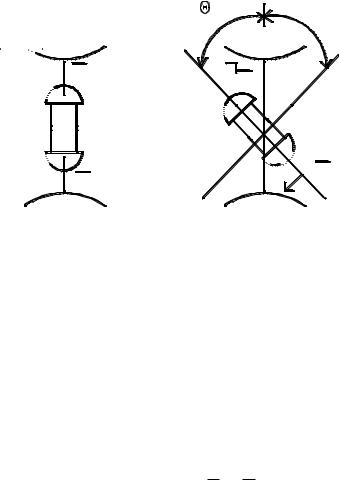
Рассмотрим, как образуется электромагнитный момент М синхронного двигателя (рис. 5.12).
 2
2
N
статор 
 N
N

 F1
F1


 S
S


 N
N

 F2
F2

 F1
F1
 S
S


 N
N




F2
S |
S |
а) Мс = 0 |
б) Мс > 0 |
|
Рис. 5.19 |
На рис. 5.19 показано взаимодействие магнитных полюсов статорной обмотки (N-S) и обмотки возбуждения (S-N) в двух случаях:
а) момент сопротивления M C 0 (холостой ход);
б) момент сопротивления M C 0 .
При холостом ходе M C 0 оси магнитных полей статора и обмотки возбуждения, а также силы взаимодействия F1, F 2 между полюсами
93
направлены по одной прямой и не создают вращающего (электромагнитного) момента M 0 .
При нагрузке M C 0 оси магнитных полей статора и обмотки возбуждения образуют между собой угол . Силы взаимодействия между
|
|
|
|
|
полюсами F1, |
F 2 создают вращающий (электромагнитный) момент, который |
|||
компенсирует |
момент нагрузки M M C , и двигатель работает с |
|||
электромагнитным моментом.
Если синхронная машина работает с отставанием магнитного поля обмотки возбуждения (угол θ), то такой режим называется двигательным, если опережает (угол θ2), то синхронная машина переходит в генераторный режим.
5.3.2. Схема замещения трёхфазного синхронного двигателя
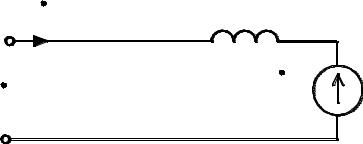
Синхронный двигатель (С.Д.) состоит из трех симметричных фаз, поэтому достаточно рассмотреть схему замещения одной фазы (рис. 5.20).
I C |
X C |
|
|
U 1ф ~ |
E0 |
|
Рис. 5.20
На рисунке 5.20 показано:
U1 , IC – напряжение и ток статора статорной обмотки;
X C – индуктивное сопротивление статорной обмотки (Ом);
E0 – ЭДС, наводимая магнитным потоком обмотки возбуждения в
статорной обмотке. ЭДС E0 |
пропорциональна току возбуждения I B E0 |
I B . |
||
Составим уравнение электрического состояния статорной обмотки: |
|
|||
|
|
|
|
|
U 1 |
E0 |
jX C I C |
(5.23) |
|
Векторная диаграмма для схемы замещения показана на рис. 5.21.

jXC I C
U 1 |
|
|
|
E0 |
|
|
|
|
|
|
|
|
|
|
|
|
I C |
Рис. 5.21
Построение |
векторной диаграммы начинаем с |
вектора |
фазного |
|
|
|
|
|
|
напряжения U 1 . |
Под углом сдвига фаз строим вектор тока статора I C . |
|||
|
|
|
|
|
Далее, из конца вектора U 1 под углом 900 к вектору тока I C строим вектор |
||||
|
|
|
|
|
падения напряжения на индуктивном |
сопротивлении |
jX C I C . |
Соединив |
|
|
|
|
|
|
начало вектора U 1 и начало вектора |
jX C I C , получаем вектор ЭДС E 0 и |
|||
угол между векторами U 1
Принимая, что синхронная машина идеальная, т.е. без потерь, мощность на валу двигателя P2 будет равна потребляемой активной мощности P1 из
сети: |
|
|
|
|
|
|
P P 3U |
1 |
I |
C |
cos |
(кВт), |
(5.24) |
2 1 |
|
|
|
|
где – угол сдвига фаз.
5.3.3. Формула электромагнитного момента. Угловая характеристика
Электромагнитный (вращающий) момент синхронного двигателя равен:
M P2 (Н∙м),
1
где 1 – угловая частота вращения магнитного поля статора, 1/с.
95

1 30n1 ,
где n1 – частота вращения магнитного поля, об/мин.
С учетом (5.24) электромагнитный момент будет:
M |
3U1 IC cos |
(5.25) |
|
1 |
|||
|
|
В таком виде (6.25) формула момента не используется. После нескольких преобразований [3] формула момента примет следующий вид:
M |
3U1 IC E0 |
sin |
(5.26) |
|
|||
|
1 X C |
|
|
Проанализируем полученное выражение:
момент пропорционален фазному напряжению M U1 , поэтому снижение напряжения не оказывает существенного влияния на момент, в отличие от асинхронного двигателя;
момент пропорционален ЭДС E0 , соответственно току возбуждения
M U1 I B , поэтому, чем больше ток, тем больше момент.
Под угловой характеристикой понимается зависимость момента двигателя от угла θ:
M f .
На рис. 5.22 приведена угловая характеристика синхронного двигателя.
M( Н м ) |
|
|
||
|
|
|
IВ>IB1 |
|
Mкр |
|
IВ1 |
|
|
|
I |
|
II |
|
0 |
|
|
π |
θ |
|
||||
|
||||
|
|
|
||
|
|
|
|
|
2
Рис. 5.22
Угловая характеристика позволяет проанализировать процессы в двигателе при изменении нагрузки на валу ротора. При появлении момента сопротивления M C на валу двигателя ротор притормаживается, угол нагрузки

θ увеличивается и в соответствии с угловой характеристикой увеличивается вращающий момент двигателя М. При равенстве М = МС наступает новый установившийся режим. При номинальном режиме двигателя МНОМ
соответствующий угол HOM 25 300 . При M C M max ротор отстаёт больше чем на максимально допустимый угол 2 , момент двигателя начнет
уменьшаться, ротор будет замедляться вплоть до полной остановки. Этот процесс называется выпадением двигателя из синхронизма, при котором машина должна быть отключена от сети.
Существуют два способа регулирования частоты вращения n2 :
изменением частоты |
питающей сети |
f1 var с помощью |
преобразователя частоты |
f f f ' ; |
|
изменением числа пар магнитных полюсов p var p 1, 2, 3... , но практического применения этот способ не получил.C 11
5.3.4. Пусковые режимы синхронного двигателя
Известно [2], что синхронный двигатель не обладает собственным пусковым моментом. Если его включить в сеть, то ротор будет совершать колебания около положения равновесия с частотой f = 100 Гц, и двигатель не запустится.
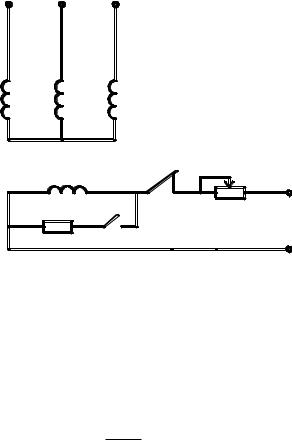
Чаще всего синхронный двигатель запускают в асинхронном режиме (рис. 5.23) в следующей последовательности:
97
A(L1) B(L2) С( L3)
О.В. |
К1 |
RB |
|
||
|
|
|
RД |
К2 |
+ |
|
||
|
|
U B |
|
|
- |
|
Рис. 5.23 |
|
1.С помощью контакта K1 отключают обмотку возбуждения ОВ от источника питания U B и замыкают ее с помощью контакта K2 на дополнительное сопротивление RД .
2.Подключают трехфазную статорную обмотку к сети, в ней образуется вращающееся магнитное поле с частотой вращения:
n1 60 f1 (об/мин). p
Этот магнитный поток, пересекая витки дополнительной пусковой обмотки (типа «беличьей клетки»), расположенной на роторе, наводит в ней ЭДС, и по обмотке идет ток. Этот ток, взаимодействуя с вращающимся магнитным полем, образует электромагнитный момент аналогично асинхронному двигателю, который начинает разгонять ротор до частоты вращения n2 .
3. |
При достижении ротором частоты вращения n2 0.95 098n1 с |
|
помощью контакта К1 подключают обмотку возбуждения (ОВ) к |
|
источнику питания. Ротор после нескольких колебаний входит в |
|
синхронизм: |
|
n2 n1 . |
4. |
После достижения синхронизма отключают RД с помощью контакта |
|
K2 , и на этом процесс пуска заканчивается. |
5.3.5. U-образные характеристики синхронного двигателя
Под U-образными характеристиками синхронного двигателя понимается зависимость тока статора I C и коэффициента мощности от тока возбуждения
I B .
IC f I B , |
cos f I B . |
|
|||
Зависимость тока статора I C |
от параметров синхронного |
двигателя |
|||
U1 , E0 , X CИН описывается следующим выражением: |
|
||||
|
|
|
|
|
|
|
E0 |
|
|
||
I C |
U 1 |
. |
(5.27) |
||
jXCИН |
|||||
|
|
|
|||
Из анализа (5.27) в зависимости от величины тока возбуждения синхронный двигатель может работать в трёх качественно различных режимах.
I режим. Ток возбуждения изменяется в пределах 0 I B I BH , где I BH –
номинальное значение тока возбуждения. При этом напряжение U1 больше, чем ЭДС E0 U1 E0 , ток статора I C > 0, cos > 0. Двигатель обладает активно-индуктивными свойствами, т.е. потребляет отстающий ток. Двигатель недовозбуждён.
|
II режим. Ток возбуждения IВ = IВН. При этом напряжение U1 |
равняется |
|
ЭДС |
E0 |
U1 E0 , ток статора I C = 0 и cos = 1. Двигатель |
обладает |
активными свойствами и потребляет из сети активную мощность P – |
|||
минимальную мощность. Двигатель имеет номинальный ток возбуждения. |
|||
|
III режим. Ток возбуждения IВ > IВН. При этом напряжение U1 меньше |
||
ЭДС |
E0 |
U1 E0 , ток статора I C < 0 и cos < 0. Двигатель |
обладает |
активно-емкостными свойствами, т.е. потребляет из сети активную мощность P, но отдает в сеть реактивную мощность - QC. Двигатель перевозбужден и потребляет опережающий ток.
Эти режимы изображены на рис. 5.24.
99
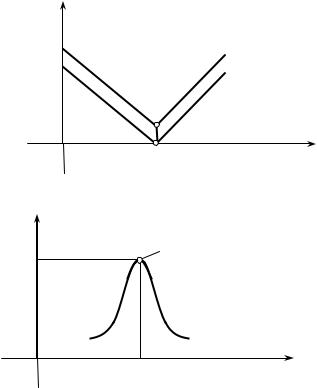
Ic(A)
I
cosφ
|
|
MC>0 |
|
|
MC=0 |
|
a’ |
III |
|
|
|
a |
II |
Iв(A) |
|
|
a II
1,0
I |
|
III |
|
IBH |
Iв(A) |
|
|
|
|
|
Рис. 5.24 |
На рис. 5.24 первый режим обозначен I, второй режим обозначен точкой «а» и соответствует номинальному току возбуждения IВН, третий режим обозначен III.
При нагрузке на валу двигателя МС > 0 точка «а» перемещается вправо и соответствует точке «а'».
Свойство синхронных электродвигателей потреблять из питающей сети опережающий ток особенно ценно для промышленных установок, так как оно позволяет одновременно с использованием синхронной машины в качестве приводного двигателя использовать ее и для повышения коэффициента мощности cos установки без применения статических конденсаторов.
5.3.6. Рабочие характеристики синхронного двигателя
Под рабочими характеристиками синхронного двигателя понимаются зависимости тока статора I C , момента M, частоты вращения ротора n2,
коэффициента мощности cos и КПД от мощности на валу двигателя Р2.