

9886
.pdf11
движения. В этих целях были созданы специализированные монтажноэксплуатационные подразделения, в системе внутренних дел, подчиняющиеся ГАИ. В задачу этих подразделений входило:
∙установка светофоров, дорожных знаков;
∙нанесение разметки;
∙установка пешеходных ограждений и эксплуатация этих технических средств
организации движения.
В 1978 г. утверждается Положение о Государственной автомобильной инспекции, в котором закреплены новые функции этой службы. В частности:
∙регулирование движения транспортных средств и пешеходов на улицах и дорогах и надзор за дорожным движением;
∙учет ДТП, анализ их причин и условий возникновения, разработка рекомендаций по устранению этих причини повышению уровня безопасности дорожного движения;
∙рассмотрение представленных на согласование маршрутов общественного транспорта, автотранспортных средств с особо ценными, опасными, тяжеловесными и крупногабаритными грузами;
∙внедрение и эксплуатация технических средств организации и контроля дорожного движения, выполнение функций заказчика перед промышленными
организациями.
В соответствии с Российским Законом о милиции, введенным в действие в 1991 г., задачи ГАИ по обеспечению безопасности дорожного движения теперь ограничены в основном рамками надзорных полномочий. Большинство функций в организации дорожного движения передано созданному в 1990 г. Министерству транспорта Российской Федерации, которое призвано формировать и осуществлять государственную политику в области безопасности дорожного движения
Таким образом, вопросы организации дорожного движения, до настоящего времени сосредоточенные в основном в подразделениях ГАИ ( с 1998 г. ГИБДД ), передаются дорожно-коммунальным организациям, в ведении которых находится УДС. Привлечение к решению этих проблем специализированных проектных институтов создает условия для более высокого уровня организации дорожного движения.
12
ЛЕКЦИЯ № 2
Тема: Характеристики транспортного потока.
Многолетний опыт научных исследований и практических наблюдений за транспортными потоками позволил разработать соответствующие объективные показатели. Наиболее необходимыми и часто применяемыми являются интенсивность транспортного потока, его состав по типам транспортных средств, плотность потока, скорость движения, задержки движения.
1.Интенсивность транспортного потока (интенсивность движения) Nа – число транспортных средств, проезжающих через сечение дороги за единицу времени. в качестве расчетного периода времени для определения интенсивности движения принимают год, месяц, сутки, час и более короткие промежутки времени (минуты, секунды) в зависимости от поставленной задачи и средств измерения.
2.Неравномерность транспортных потоков следует разделять на пространственную и временную.
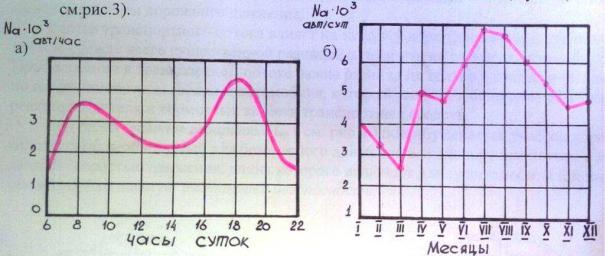
а) Пространственная неравномерность отражает прежде всего неравномерность размещения грузо- и пассажирообразующих пунктов и мест их притяжения. б) Временная неравномерность имеет важнейшее значение в проблеме организации движения и может наблюдаться в течении года, месяца, суток ( см.рис.3).
а) |
б) |
Рис. 3 Изменение интенсивности транспортного потока во времени. а – изменение интенсивности в течении суток; б – в течении года.
Временная неравномерность может быть охарактеризована соответствующим коэффициентом неравномерности:
∙ Коэффициент годовой неравномерности
К |
нг = |
12 |
× N ам |
|||
|
|
N |
|
(3) |
||
|
|
|
|
аг |
||
∙ Коэффициент суточной неравномерности

13
|
К нс |
= |
24 × |
N ач |
|
|
N |
|
(4) |
||
|
|
|
ас |
||
где: Nам – |
интенсивность движения за сравниваемый месяц, авт/мес; |
||||
Nаг – |
суммарная интенсивность движения за год, авт/год; |
||||
Nач – |
интенсивность движения за сравниваемый час, авт/час; |
||||
Nас – |
суммарная интенсивность движения за сутки, авт/сут. |
||||
Анализируя рис. 3а можно выделить так называемые пиковые часы или периоды , в которые возникают наиболее сложные задачи организации и регулирования движения. следует отметить, что интенсивность движения в часы пик в различные дни недели, месяца и года имеет неодинаковые значения.
3. Временной интервал ti – это промежуток времени между следующими друг за другом по одной полосе транспортными средствами является показателем, обратным интенсивности движения.
t i |
= |
3600 |
|
(5) |
N |
|
|||
|
|
a |
||
Если интервал ti между автомобилями более 10 с, то их взаимное влияние является относительно малым, а условия движения характеризуются как “ свободные”.
4. Состав транспортного потока характеризуется соотношением в нем транспортных средств различного типа. Этот показатель оказывает значительное влияние на все параметры дорожного движения.
Состав транспортного потока влияет на загрузку дорог движением, что объясняется, прежде всего существенной разницей в габаритных размерах автомобилей. При движении в транспортном потоке важна разница не только в статистическом, но и в динамическом габарите автомобиля, который зависит в основном от времени реакции водителя и тормозных качеств транспортных средств.
Под динамическим габаритом Lд ( см. рис.4 ) подразумевается участок дороги, минимально необходимый для безопасного движения в транспортном потоке с заданной скоростью движения, длина которого включает длину автомобиля lа и
дистанцию d, называемую дистанцией безопасности.
Рис. 4 Динамический габарит автомобиля в плотном транспортном потоке.
Lд = lа +d + 1 м |
(6) |
Величина динамического габарита зависит от ряда факторов:
-тормозные качества автомобиля;
-обзорности дороги;
-легкости управления автомобилем;
-маневренности транспортного средства.
14
Дистанция безопасности d определяется следующим способом:
|
d = t p × V a + |
|
V a2 |
|
|
|
|
|
|
(7) |
|
|
|
||||
|
|
2 × ja |
|
||
|
|
|
|
|
|
где: Va – |
скорость движения, км/час; |
|
|
|
|
ja – |
установившееся замедление, м/с2. |
|
|
||
5. Плотность потока характеристика, определяющая степень стесненности транспортного потока. Измеряется числом транспортных средств, приходящихся на 1 км протяженности дороги.
q = |
1000 |
|
||
|
L |
|
(8) |
|
|
|
|||
|
|
д |
||
Предельная плотность достигается при неподвижном состоянии колонны автомобилей, расположенных вплотную друг к другу. Практические исследования МАДИ показали, что приблизительно qmax = 170-185 авт/км. В зависимости от плотности потока условия движения, по степени стесненности, можно подразделить на следующие: свободное, связанное, насыщенное, колонное, перенасыщенное.
6. Скорость движения является важнейшим показателем транспортного потока, так как является характеристикой быстроты доставки грузов и пассажиров.
В практике организации движения принято оценивать скорость мгновенными ее значениями, зафиксированными в отдельных типичных сечениях дороги. Однако ее величина зависит от многих факторов и подвержена значительным колебаниям.
Верхний предел скорости определяется его максимальной конструктивной скоростью Vmax, которая зависит главным образом от удельной мощности двигателя. Опыт показывает, что водитель ведет автомобиль с его максимальной скоростью лишь в исключительных случаях и кратковременно, так как это сопряжено с чрезмерно напряженным режимом работы. Поэтому даже при благоприятных условиях максимальная скорость длительного движения (крейсерская) для большинства автомобилей составляет 0,75-0,85 Vmax. Однако реальные дорожные условия вносят существенные поправки в фактический диапазон скоростей. Существенное влияние оказывают расстояние ( дальность) видимости и ширина полосы движения.
-Расстояние видимости - это протяженность участка дороги перед автомобилем, на котором водитель в состоянии различить поверхность покрытия. Это позволяет водителю заблаговременно оценить условия движения и
прогнозировать обстановку. Условие безопасности выполняется при условии Sв > Sо в любых конкретных дорожных условиях. Примерные значения снижения скорости движения V по сравнению со скоростью, которая обеспечивается при дальности видимости 700 м и более, следующие:
Sв, м |
100 |
200 |
300 |
400 |
500 |
600 |
V.%: |
|
|
|
|
|
|
грузовых |
13,5 |
9,8 |
5,8 |
3,3 |
2,0 |
1,0 |
легковых |
17,5 |
12,7 |
8,3 |
4,9 |
2,5 |
0,9 |
15
-Ширина полосы движения, предназначенная для движения одного ряда автомобилей и выделенная обычно продольной разметкой, определяет требования к точности траектории движения автомобиля. На основании исследований проф. Д.П. Великанова получена зависимость, характеризующая связь между скоростью и необходимой шириной полосы движения:
|
Вд = 0,015×Va + ба + 0,3 |
(9) |
где: ба – |
габарит автомобиля по ширине, м; |
|
Va – |
скорость движения транспортного средства. |
|
Согласно приведенной зависимости, скорость, с которой водитель средней квалификации длительно и уверенно может вести автомобиль, ориентировочно составляет: при ширине полосы 3 м – 65 км/час;
3,5 м – 90 км/час.
Влияние рассмотренных факторов на скорость движения проявляется в условиях свободного движения транспортных средств, когда не ощущается взаимного стеснения движения. В противном случае наблюдается снижение скорости движения под воздействием интенсивности и состава потока. Влияние интенсивности движения на скорость отображается следующей зависимостью:
Va = Vac × ( 1 - k × Na ) |
(10) |
где: Vac – скорость свободного движения автомобиля на данном участке дороги, км/час;
k - корреляционный коэффициент снижения скорости движения в зависимости от интенсивности транспортного потока.
7. Задержки движения являются показателем, на который должно быть обращено особое внимание при оценке состояния дорожного движения.
Задержки движения в реальных условиях можно разделить на две основные группы: на перегонах дорог и на пересечениях.
а) Задержки транспортного потока на перегоне.
Задержки на перегонах могут быть вызваны маневрирующими или медленно движущимися транспортными средствами, пешеходным движением, помехами от стоящих автомобилей, в том числе при погрузочно-разгрузочных операциях, а также заторами, связанными с перенасыщением дорог транспортными средствами, т.е. плотность потока выше оптимальной.
Потери времени одного автомобиля определяется по зависимости:
t |
= |
l n |
|
|
1 |
(l ) − |
|
1 |
(l |
) dl |
|
|
∫ |
|
|
|
|
|
|||||||
|
|
|
|
|
V p |
|
(11) |
|||||
|
|
l |
1 |
V ф |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Общие потери времени транспортного потока определяются как: |
|
|||||||||||
|
Т |
|
|
|
= N а × t |
|
× Т |
|
(12) |
|||
16
где: Т - общие потери времени транспортного потока
t - средняя суммарная задержка одного автомобиля, с;
Vф и Vр – соответственно фактическая и принятая расчетная ( или оптимальная) скорости, м/с;
dl – элементарный отрезок дороги;
Т – продолжительность наблюдения, час.
Задержки транспортных средств на отдельных узлах или участках УДС могут быть оценены коэффициентом задержки Кз, характеризующим степень увеличения фактического времени нахождения в пути tф по сравнению с расчетным tр.
К з |
= |
t |
ф |
|
|
|
(13) |
||
t |
|
|||
|
|
р |
||
б) Задержки транспортного потока на перекрестке.
Задержки на пересечениях обусловлены необходимостью пропуска транспортных средств и пешеходов по пересекающимся направлениям на нерегулируемых перекрестках и простоями при запрещающих сигналах светофора.
На нерегулируемых перекрестках (при наличии знаков приоритета) задержки проявляются лишь на второстепенной дороге, так как водитель, не обладающий правом преимущественного проезда, вынужден ожидать появление приемлемого интервала времени между транспортными средствами на главной дороге. Задержка зависит от продолжительности ожидания приемлемого интервала, продолжительности пребывания в очереди и степени изменения автомобилем скорости движения. Составляющие потерь даже при постоянных интенсивностях движения на пересекающихся дорогах изменяются в широких пределах и для каждого автомобиля различны. Учитывая влияние большого числа случайных факторов, потери времени обычно оценивают средней задержкой одного автомобиля t н , рассчитываемой при наличии некоторых допущений.
|
t н |
= t н1 + t н2 |
+ t н3 |
(14) |
|
|
|
|
|
где: t |
н1 – среднее время ожидания приемлемого интервала, с; |
|
||
t |
н2 и t н3 – средние задержки, связанные соответственно с пребыванием |
|||
автомобилей в очереди, образующейся на второстепенной дороге, и с торможением автомобиля перед перекрестком.
Среднее время t н1 принимают равным отношению суммарной продолжительности неприемлемых интервалов к числу приемлемых. Средняя задержка t н2 зависит от числа автомобилей в очереди перед главной дорогой. Среднюю задержку t н3 определяют как разность между временем, необходимым на торможение перед перекрестком и последующий разгон автомобиля, и временем его движения в свободных условиях ( без торможения).
При условии постоянных замедления и ускорения в процессе изменения скорости и экспоненциального распределения временных интервалов между автомобилями на главной дороге средняя задержка автомобиля на данном направлении второстепенной дороги определяется по зависимости:
|
|
|
еNг ×tгр |
− Nг ×tгр −1 |
|
|
|
V |
1 |
|
1 |
|
||||
t = |
|
|
|
|
|
|
|
+ |
а |
|
× |
|
− |
|
|
|
|
− |
× ( |
Nг ×tгр − |
× |
− ) |
7,2 |
|
а |
|
|||||||
н |
|
|
а |
|
|
(15) |
||||||||||
Nг |
|
Nв е |
Nг |
tгр |
1 |
|
|
|
|
Т |
|
|
р |
|||
|
|
|
|
|
|
|
|
|||||||||
17
где: е – основание натурального логарифма;
Nг – интенсивность движения транспортного потока на главной дороге в обоих направлениях, авт/с;
Nв – интенсивность, приходящаяся в среднем на одну полосу второстепенной дороги в рассматриваемом направлении движения, авт/с;
ат и ар – соответственно замедление и ускорение автомобиля (в расчетах принимаются ат = 3-4 м/с2, ар = 1,0-1,5 м/с2).
Среднюю задержку автомобиля на перекрестке в целом определяют как средневзвешенное значение задержек для всех направлений (подходов к перекрестку) второстепенной дороги по формуле:
|
= ∑n |
(t нj × N j )/ ∑n |
|
|
t н |
N j |
(16) |
||
1 |
1 |
|
|
|
где: Nj – интенсивность движения на j-м направлении второстепенной дороги, авт/час;
n – число направлений (подходов к перекрестку) второстепенной дороги.
На регулируемых перекрестках задержка движения в основном зависит от режима работы светофорной сигнализации и возникает на второстепенной и главной дорогах в силу действия запрещающего сигнала.
Эту задержку иногда определяют по приближенной формуле:
t р = (Тц − to )/ 2 |
(17) |
Использование данной формулы приводит к ощутимым погрешностям при определении задержки, учитывая, что эта формула справедлива лишь при условии прибытия автомобилей к перекрестку регулярно через постоянные интервалы времени. На практике управления дорожным движением во многих странах широкое распространение для определения задержки получила формула Ф. Вебстера:
|
|
|
Тц |
× (1 − λ ) |
|
|
|
Χ |
|
|
Т |
ц |
|
1 / 3 |
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
2+3λ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
t р |
= |
|
|
|
|
2 + |
|
|
|
|
2 |
× Χ |
|||||
|
× (1 − λ × Χ) |
2 × N × (1 − Χ) |
− 0.65 × |
|
|
(18) |
|||||||||||
|
2 |
|
|
N |
|
|
|
|
|
||||||||
где: λ - отношение длительности разрешающего сигнала к циклу регулирования
|
|
t |
|
|
|
|
|
λ = |
o |
|
|
; |
|
|
|
|
||||
|
|
Т |
|
|
|
|
|
|
|
ц |
|
|
|
|
|
|
|
|
N – интенсивность движения транспортных средств в рассматриваемом направлении, ед/с.
Первая составляющая формулы позволяет определить задержку при регулярном прибытии автомобилей к перекрестку. При полностью насыщенной фазе (x=1) она после простейших преобразований превращается в формулу (17).
Вторая составляющая учитывает случайный характер прибытия на перекресток.
Третья составляющая является корректирующим членом, позволяющим учесть погрешность при расчете задержки по первым двум составляющим формулы (18) по сравнению с ее значением определенным экспериментально. В среднем эта погрешность составляет 10%, поэтому для практических расчетов обычно применяют упрощенную формулу:

18
|
|
Т ц × (1 − λ )2 |
|
|
Χ 2 |
|
|
|
|
t p |
= 0 .9 × |
|
|
+ |
|
|
|
|
|
|
|
2 N |
× (1 |
|
(19) |
||||
|
2 × (1 − λ × Χ ) |
|
− Χ ) |
||||||
|
|
|
|
|
|
|
|
|
|
В целом для регулируемого перекрестка средневзвешенную задержку
t p определяют так же, как и для нерегулируемого (см формулу 16), с той лишь разницей, что учитывают все направления не только второстепенной, но и главной дороги.
19
ЛЕКЦИЯ № 3
Тема: Математическое описание транспортного потока.
1. Классификация моделей потока.
При решении задач организации движения приходится прибегать к описанию транспортных потоков математическими методами. Первостепенными задачами, послужившими развитию моделирования транспортных потоков, явились изучение и обоснование пропускной способности магистралей и их пересечений. Основы математического моделирования закономерностей дорожного движения были заложены в 1912 г. русским ученым проф. Г. Д. Дубелиром. Первая попытка обобщить математические исследования транспортных потоков и представить их в виде самостоятельного раздела прикладной математики была сделана Ф. Хейтом в
1963 г.
Известные и нашедшие практическое применение в организации дорожного движения математические модели можно разделить на две группы в зависимости от подхода: детерминированные и вероятностные (стохастические).
К детерминированным (более простым) относятся модели, в основе которых заложена функциональная зависимость между отдельными показателями, например, скоростью и дистанцией между автомобилями в потоке.
Стохастические модели отличаются большей объективностью. В них транспортный поток рассматривается как вероятностный (случайный) процесс.
2. Детерминированные модели.
Простейшей математической моделью, описывающий поток автомобилей, является так называемая “ упрощенная динамическая модель”. Её применяют для определения максимально возможной интенсивности движения по одной полосе дороги Na max при скорости Va :
N a max |
= |
A × V a |
||
L |
|
(20) |
||
|
|
Д |
||
где: А – коэффициент размерности.
При выражении скорости в километрах в час, а динамического габарита в метрах получаем выражение для определения пропускной способности полосы.
Р п |
= |
1000 |
× V а |
||
|
|
|
(21) |
||
|
L |
|
|||
|
|
|
Д |
||
Данная математическая модель составлена на основании двух упрощающих допущений: скорость всех транспортных единиц в потоке одинакова; транспортные средства однотипны, т.е. имеют равные динамические габариты.
На данный момент известны три подхода к определению величины “ динамического габарита”.
а) При расчете минимальной теоретической дистанции исходят из абсолютно равных тормозных свойств пары автомобилей и учитывают только время реакции
|
20 |
ведомого водителя tр . В этом случае |
LД =la +Va ×tp +lo , а уравнение (20) |
приобретает линейный характер. В этом случае возможная интенсивность транспортного потока не имеет предела по мере увеличения скорости. Однако это не соответствует реальным характеристикам водителей и приводит к завышению возможной интенсивности потока. Здесь главную роль играет практическое значительное увеличение tp при высоких скоростях.
б) При расчете на “ полную безопасность” исходят из того, что дистанция безопасности должна быть равна полному остановочному пути заднего (второго) So2 . Тогда динамический габарит
|
= la |
+ Va × t p |
+ |
V 2 |
+ lo |
|
||
LД |
|
a |
(22) |
|||||
2 |
× ja |
|||||||
|
|
|
|
|
|
|||
В этой упрощенной формуле не выделен отрезок, проходимый за время нарастания замедления, а учитывается только установившееся замедление ja . В этом случае уравнение (20) приобретает вид квадратичной функции, а интенсивность имеет предел при определенном значении скорости Va ( скорости транспортного потока). Такой подход больше соответствует на той предпосылке, что при расчете дистанции безопасности при высоких скоростях (более 90 км/час).
в) Наиболее реальный подход основан на той предпосылке, что при расчете дистанции безопасности d надо учитывать разницу тормозных путей (или замедлений) автомобилей, а также то обстоятельство, что “ лидер” в процессе торможения также перемещается на расстояние, равное своему тормозному пути. Исходя из этого
|
|
|
|
|
|
V 2 |
|
1 |
|
1 |
|
|
|
подхода дистанция безопасности |
d = V |
|
× t |
|
+ |
|
a |
× |
|
− |
|
. |
Если принять время |
a |
p |
|
|
|
|
||||||||
|
|
|
|
2 |
|
j 2 |
|
j1 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||
реакции водителя (включая время запаздывания срабатывания гидравлического тормозного привода) равным 1с, а разность максимальных замедлений на сухом асфальтобетонном покрытии при экстренном торможении однотипных легковых автомобилей с учетом эксплуатационного состояния тормозной системы в допустимых нормами пределах около 2 м/с2, то динамический габарит
L |
Д |
= l |
a |
+ V |
a |
+ 0.03×V 2 |
+ 1 |
(23) |
|
|
|
a |
|
С учетом данных современных исследований системы ВАДС данный метод приемлем для ограниченных прежде всего по составу и скорости транспортного потока условий. Из-за несовершенства тормозных систем автомобилей даже на дорогах с высоким коэффициентом сцепления (ϕ = 0,7 - 0,8 ) при экстренном торможении автомобилей не гарантировано сохранение их устойчивого прямолинейного движения. Поэтому расчеты по формуле (23) могут быть рекомендованы для скоростей не выше 80 км/час.
Соответствие расчетов с использованием данной зависимости (23) реальным условиям дорожного движения с ограниченными скоростями подтверждается практическим опытом. На его основе в литературе по безопасности дорожного движения содержится широко известная рекомендация о том, что безопасная дистанция (в метрах) должна быть равна примерно половине скорости ( в км/час).
Увеличение скорости и интенсивности движения на дорогах, а также рост числа ДТП, вызванных столкновением автомобилей между собой, привели к необходимости более детального изучения взаимодействия движущихся друг за другом автомобилей.