

9489
.pdf10
а б
F
B
F  F A A
F A A
в
F |
F F |
B B
A
Рис.1.3
Останется одна сила ′ = , которая эквивалентна силе .
Эта аксиома справедлива только при рассмотрении абсолютно твердых тел. В этом случае сила может рассматриваться как скользящий вектор.
Скользящими векторами называют вектора, которые могут свободно переноситься вдоль линии их действия.
Силу нельзя считать скользящим вектором, рассматривая ее действие на деформируемые тела. Это не допускается, например, при изучении сопротивления материалов, в котором рассматриваются тела, деформирующиеся под действием сил.
АКСИОМА 3. АКСИОМА ПАРАЛЛЕЛОГРАММА
Две непараллельные силы, приложенные в одной точке, имеет равнодействующую, приложенную в той же точке и равную их векторной (геометрической) сумме.
F1 |
R |
О |
F2 |
|
|
|
|
|
Рис. 1.4 |
|
|
|
|
Напомним, что геометрически векторная сумма двух сил = 1 |
+ 2 |
|
(рис. 1.4) изображается диагональю параллелограмма, построенного на этих силах, как на его сторонах.
СЛЕДСТВИЯ:

11
Любую силу можно разложить на две непараллельные силы, приложенные в той же точке, что и исходная сила. Это можно сделать бесконечным количеством способов.
Если линии действия двух сил пересекаются, то эти силы имеют равнодействующую, поскольку силы, как скользящие вектора, могут быть перенесены в эту точку.
Если задана система нескольких сил, линии действия которых пересекаются в некоторой точке, то они также имеют равнодействующую, линия действия которой проходит через точку пересечения.
АКСИОМА 4. АКСИОМА ВЗАИМОДЕЙСТВИЯ
(Принцип равенства действия и противодействия)
Силы, возникающие при взаимодействии двух тел,
1)имеют общую линию действия,
2)направлены по ней в противоположные стороны и
3)равны по модулю.
Приведенная формулировка говорит о том, что силы никогда не возникают поодиночке. Действие всегда порождает противодействие.
При этом (рис. 1.6): 2 = −1 и F2 F1 .
F2
F1
Рис. 1.6
Сравнивая аксиому 4 с аксиомой 1, можно увидеть, что формально силы действия и противодействия образуют уравновешенную систему сил.
Однако надо учитывать, что эти силы приложены к разным телам.
На основании данной аксиомы можно сделать важное заключение.

12
СВОЙСТВО ВНУТРЕННИХ СИЛ
Векторная сумма внутренних сил любой механической системы всегда равна нулю.
Действительно, для каждой внутренней силы в системе имеется и сила противодействия ′, а их векторная сумма равна нулю: + ′ = 0.
Приведенное свойство имеет большое значение, поскольку позволяет при составлении уравнений равновесия исключать из рассмотрения неизвестные внутренние силы.
АКСИОМА 5. ПРИНЦИП ОТВЕРДЕВАНИЯ (ЗАМОРАЖИВАНИЯ)
Равновесие некоторого объема жидкости не нарушится, если оно станет абсолютно твердым.
Простым примером может служить случай замерзания некоторого объема жидкости или застывания бетонной смеси.
Применение данного принципа позволяет при решении задач гидростатики использовать методы теоретической механики.
Тема 2.
СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ
2.1.ПОНЯТИЕ О СВЯЗЯХ
Материальные тела, взаимодействуя, мешают друг другу перемещаться свободно. Например, если на столе лежит книга, то поверхность стола ограничивает перемещения книги, делая невозможным ее опускание ниже этой поверхности. Также имеются ограничения у положений груза, висящего на тросе: он не может удалиться от точки подвеса на расстояние большее, чем длина троса.
Ограничения, наложенные на положения (скорости) точек механической системы, называются связями.
Связи всегда осуществляются какими-либо материальными телами.
Так, для лежащей на столе книги связь осуществляет поверхность

13
стола; для груза, висящего на тросе, — сам трос.
Реакцией связи называется сила, с которой тело, которое осуществляет связь, действует на рассматриваемое тело.
Так, для книги, лежащей на столе, реакцией связи будет сила, с которой поверхность стола действует на книгу.
Для груза, висящего на тросе, реакцией связи является сила, с которой трос действует на груз (сила натяжения троса).
Силы, не являющиеся реакциями связей, принято называть активными. Они, как правило, известны. В технических дисциплинах их часто называют нагрузками.
Реакции связей чаще всего неизвестны.
Таким образом, мы имеем теперь два способа классификации сил.
Все силы, действующие на механическую систему, делятся на:
внешние и внутренние,
активные и реакции связей.
Определение реакций связей, является целью большинства решаемых в статике задач. Большое практическое значение имеет определение сил, действующих на фундаменты, опоры, подвески, расчеты сил натяжения тросов, канатов и прочее.
Изучение равновесия несвободных тел основано на следующем принципе:
Принцип освобождаемости от связей
Всякое несвободное тело можно рассматривать как свободное, если мысленно отбросить связи, заменив их силами, с которыми они действуют на тело (реакциями).
Пример
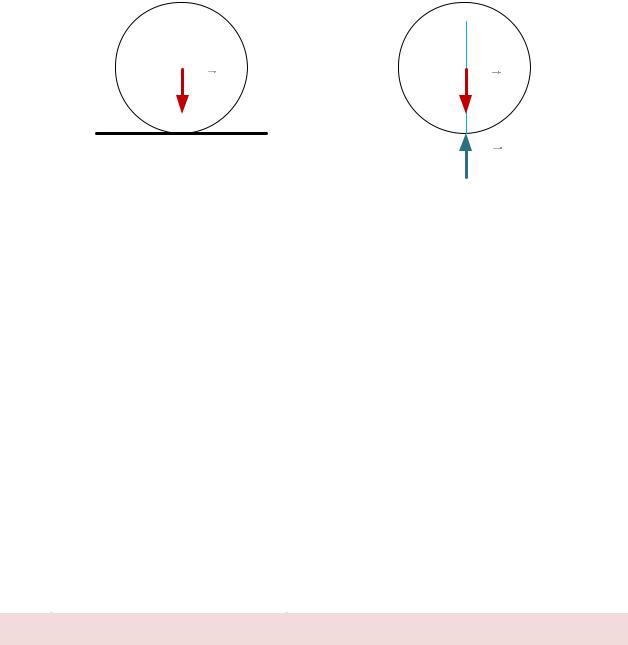
Для шара, лежащего на горизонтальной плоскости стола (рис. 2.1), мысленно отбрасывая связь (стол), мы должны ввести силу с которой стол воздействует на шар, то есть реакцию связи − силу .
14
G |
G |
N
Рис. 2.1
Поскольку шар находится в равновесии, то действующая на него
система из двух сил (силы тяжести и реакции ) является
уравновешенной. Тогда, согласно аксиоме 1, эти силы направлены по одной прямой, противоположно друг другу и равны по модулю: N = G.
Отметим, что реакция всегда направлена в сторону противоположную тому направлению, в котором связь препятствует перемещению данного тела.
Решение задач статики значительно упрощается, если заранее известны направления реакций связей. Рассмотрим самые распространенные виды связей, для которых направления реакций полностью или частично известны.
2.2.РЕАКЦИИ НЕКОТОРЫХ СВЯЗЕЙ
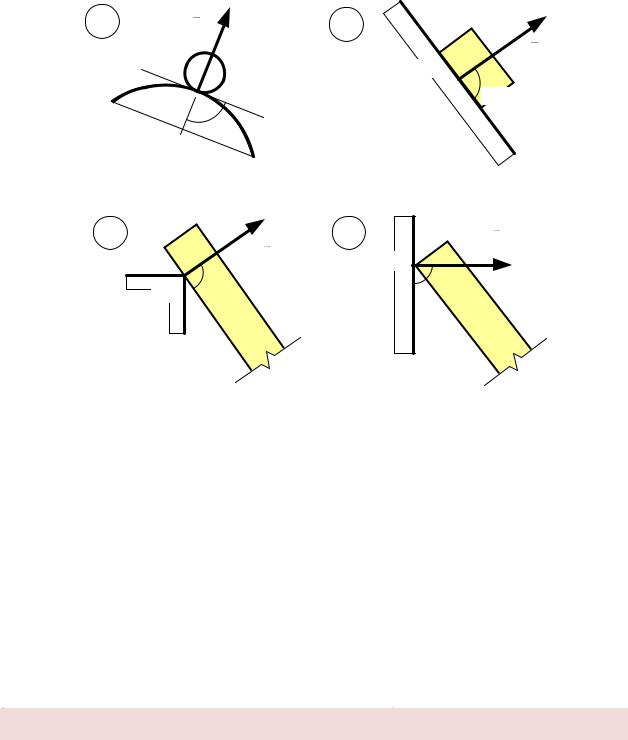
1.Свободное опирание
Гладкая поверхность при отсутствии трения позволяет взаимодействующему с ней телу свободно перемещаться по касательной плоскости в точке касания (рис. 2.1, а) и не позволяет перемещаться в направлении нормали к этой плоскости.
Следовательно, реакция такой поверхности (сила ) направлена по общей нормали. Она называется нормальной реакцией.
В частном случае, когда поверхность является плоскостью, реакция направлена перпендикулярно этой плоскости (рис. 2.2, б).
При опирании углом или на угол реакция направлена по нормали к той
15
поверхности, которая соприкасается с углом (рис. 2.2, в и 2.2, г).
а |
RA |
б |
|
||
|
|
RA |
|
|
A |
|
A |
90o |
|
|
90 o |
в |
г |
RA |
RA |
|
|
|
A |
|
90o |
|
90o |
A |
|
|
Рис. 2.2
Важно понимать, что направление линии действия реакции не зависит от действующих на тело сил.
Опирание на поверхность вызывает реакцию только при надавливании. Отрыву тела от поверхности опоры связь не препятствует.
По этой причине свободное опирание называется связью
односторонней или неудерживающей.
Теперь рассмотрим техническое устройство, называемое «шарнир».
Шарниры бывают двух типов: цилиндрические и сферические.
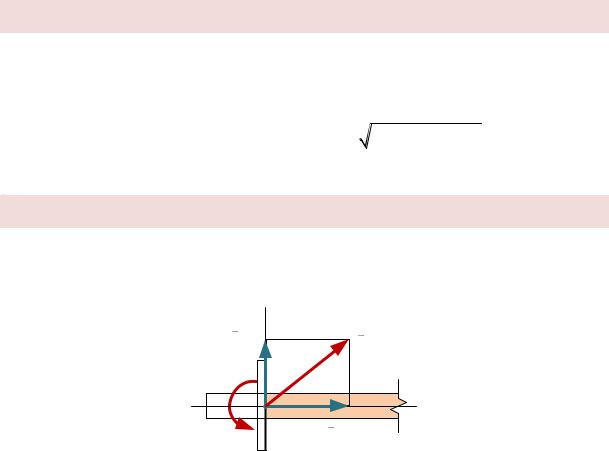
a)Цилиндрической шарнир (рис. 2.3, а).
Цилиндрический шарнир допускает поворот внутренней части относительно внешней. Поворот происходит относительно оси цилиндра. Силы взаимодействия проходят перпендикулярно касательной плоскости, проведенной через линию соприкосновения. Линия их действия всегда

16
проходит через ось шарнира.
b)Сферический шарнир (рис. 2.3, б).
Сферический шарнир допускает поворот внутренней части относительно внешней в любом направлении. Поворот происходит относительно центра шарнира. Силы взаимодействия перпендикулярны касательной плоскости, проведенной через точку соприкосновения. Линия их действия всегда проходят через центр шарнира
|
а |
|
б |
|||||
P P |
|
|
|
|
|
|||
P P |
2 |
|
|
|
|
|||
1 |
2 |
1 |
|
|
|
|
|
|
P P |
P P |
|
|
|
|
|
||
1 |
2 |
1 |
2 |
|
|
|
|
|
P |
P |
1 |
|
1 |
|
P2 |
|
|
P2 |
Рис. 2.3
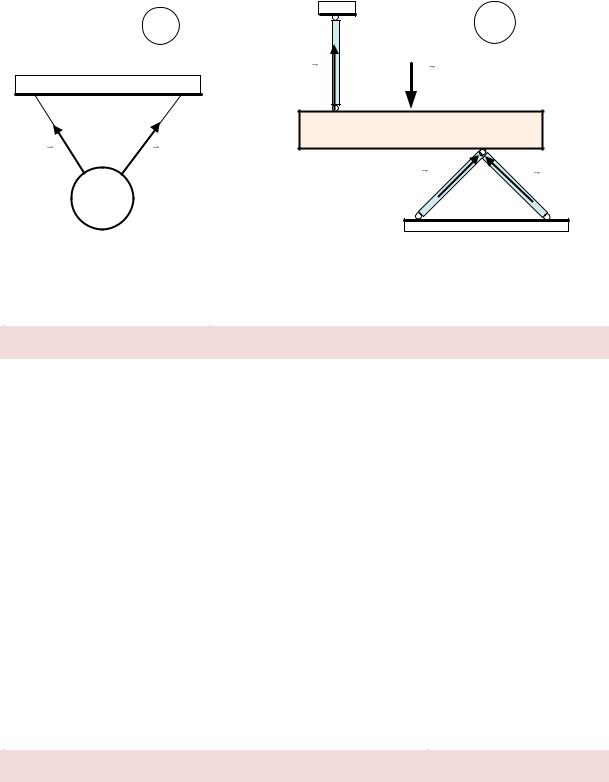
2. Нить
Под термином «нить» в теоретической механике понимают любой гибкий элемент: трос, канат, веревку и т. п. Реакция нити всегда действует вдоль нити, и направлена от тела в сторону нити.
Эта связь также является односторонней, поскольку реакция возникает только при натягивании нити.
17
|
а |
|
|
б |
|
R1 |
|
F |
|
T1 |
T2 |
|
|
|
|
|
|
R2 |
R |
|
|
|
|
2 |
|
Рис. 2.4 |
|
|
|
|
|
|
являются реакциями. |
|
На рис. 2.4, «а» силы натяжения нитей 1 |
и 2 |
|||
3. Опорный стержень.
Опорным стержнем принято называть невесомый стержень, прикрепляемый с двух сторон с помощью сферических шарниров (рис. 2.4, б).
На такой стержень действуют только две силы на его концах. Согласно аксиоме 1, эти силы имеют общую линию действия, которая проходит через центры опорных шарниров.
В случае прямолинейного стержня реакция направлена по оси стержня.
Эта связь является удерживающей или двухсторонней.
4. Шарнирно-подвижная (скользящая) опора.
Такой тип опоры может быть реализован в виде опоры на катках. Возможные способы ее схематического изображения показаны на рис. 2.5.
18
RA |
|
|
|
RA |
RA |
90о |
90о |
90о |
|
|
|
A |
A |
A |
Рис. 2.5
Наличие катков позволяет опоре свободно перемещаться вдоль поверхности, поэтому, как и в случае взаимодействия тела с гладкой поверхностью, реакция перпендикулярна к опорной поверхности. Линия ее действия проходит через центр шарнира.
Эта связь является удерживающей или двухсторонней.
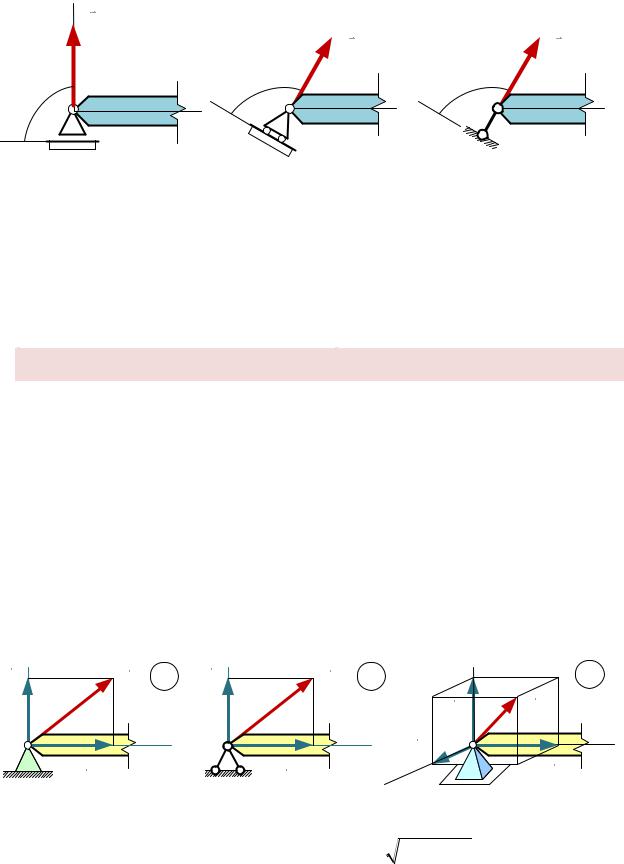
5. Шарнирно-неподвижная опора.
Если тело прикреплено к поверхности (другому телу) с помощью неподвижного цилиндрического шарнира (см. рис. 2.6, а), то реакция имеет неизвестное направление в плоскости действия и угол может быть любым. В этом случае силу неизвестного направления удобно разложить на две неизвестные силы и , направленные по координатным осям.
Схематично опора может изображаться в виде двух опорных стержней, неподвижно фиксирующих точку А, как это показано на рис. 2.6,б.
y |
RA а |
y |
|
б |
y |
в |
YA |
YA |
RA |
|
|||
|
|
|||||
|
|
|
|
Y |
|
RA |
|
|
|
|
A |
|
|
A |
x |
A |
x |
A |
|
x |
|
|
|
|
|||
|
|
|
|
Z A |
|
|
|
X A |
|
X A |
z |
|
X A |
|
|
|
|
Рис. 2.6
При этом |
|
|
|
и |
R |
X |
2 |
Y |
2 |
|
= |
+ |
A |
|
|||||
|
|
|
|
|
A |
|
A |
|
Силы и , называются составляющими силы по осям х и у. Эта связь является удерживающей.
19
6. Шаровая шарнирно-неподвижная опора.
Для шарового (сферического) шарнира реакция может иметь любое направление в пространстве. В этом случае ее следует разложить на три составляющие по осям: XA, YA и ZA (рис. 2.6, в).
При этом |
|
|
|
|
и |
R |
X |
2 |
Y |
2 |
Z |
2 |
|
= |
+ |
+ |
A |
|
A |
||||||
|
|
|
|
|
|
A |
|
A |
|
|
Эта связь является удерживающей.
7. Жесткая заделка
Движение тела может быть ограничено опорой, которая называется «жёсткая заделка». Ее схематическое изображение показано на рис. 2.7.
y |
|
|
|
RAY |
|
R |
A |
|
|
|
|
M A |
|
|
|
|
|
|
x |
|
A |
RAX |
|
|
|
|
|
|
|
Рис. 2.7 |
|
Жёсткая заделка препятствует любому поступательному перемещению тела, поэтому направление её реакции заранее определить нельзя и сначала определяют её составляющие и .
Кроме того, жёсткая заделка препятствует повороту тела. Силовой фактор , препятствующий повороту называется реактивным моментом. Свойства моментов и операции с ними будут рассмотрены в дальнейшем.
Эта связь является удерживающей.