

8325
.pdf20
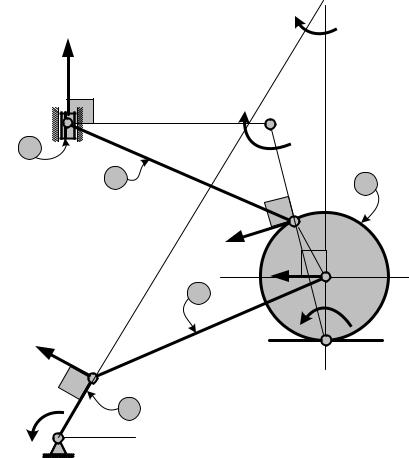
Данные для решения задачи Д-1
Задача Д-1
№ |
mA |
mB |
mD |
mE |
k1 |
k2 |
k3 |
a |
α |
β |
µ |
S |
|
|
|
|
|
|
|
|
см |
град |
град |
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
12m |
3m |
2m |
m |
3 |
2 |
1 |
10 |
30 |
60 |
0.1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
8m |
m |
2m |
m |
2 |
1 |
1 |
10 |
45 |
60 |
0.15 |
1.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
10m |
2m |
m |
m |
3 |
2 |
2 |
8 |
20 |
45 |
0.2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
12m |
3m |
2m |
m |
3 |
2.5 |
2 |
10 |
60 |
30 |
0.1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
6m |
m |
2m |
m |
4 |
2 |
1 |
5 |
30 |
40 |
0.15 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
10m |
2m |
m |
m |
2 |
1 |
1.5 |
10 |
40 |
45 |
0.2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
12m |
2m |
3m |
m |
4 |
3 |
2 |
8 |
50 |
60 |
0.1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
8m |
3m |
2m |
m |
3 |
2 |
1.5 |
10 |
30 |
50 |
0.2 |
1.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
10m |
3m |
2m |
m |
4 |
3 |
2 |
12 |
20 |
60 |
0.15 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
9m |
2m |
m |
m |
4 |
2 |
2 |
10 |
40 |
45 |
0.1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
11 |
10m |
3m |
3m |
2m |
4 |
2 |
3 |
8 |
45 |
30 |
0.15 |
1.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
8m |
2m |
m |
m |
1.5 |
1 |
0.5 |
10 |
30 |
45 |
0.1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
13 |
7m |
2m |
m |
m |
4 |
2 |
2 |
12 |
60 |
60 |
0.2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
14 |
12m |
3m |
2m |
m |
3 |
2 |
1 |
8 |
45 |
45 |
0.1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
15 |
15m |
3m |
2m |
2m |
4 |
3 |
2 |
10 |
30 |
45 |
0.15 |
1.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
16 |
10m |
4m |
2m |
m |
3 |
2 |
1.5 |
10 |
60 |
60 |
0.2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
17 |
12m |
3m |
2m |
m |
4 |
3 |
2 |
8 |
20 |
45 |
0.1 |
1.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
18 |
10m |
2m |
m |
m |
3 |
2 |
1 |
10 |
30 |
60 |
0.2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
19 |
16m |
3m |
2m |
m |
3 |
3 |
2 |
5 |
45 |
50 |
0.1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
20 |
8m |
2m |
m |
m |
4 |
2 |
0.5 |
10 |
40 |
40 |
0.15 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
21 |
10m |
3m |
2m |
m |
3 |
2 |
1 |
8 |
30 |
60 |
0.1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
22 |
12m |
m |
3m |
m |
4 |
2 |
1.5 |
10 |
30 |
30 |
0.15 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
23 |
8m |
2m |
3m |
m |
3 |
1 |
2 |
12 |
45 |
45 |
0.2 |
1.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
24 |
10m |
2m |
3m |
m |
4 |
2 |
1 |
10 |
60 |
30 |
0.1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
25 |
8m |
m |
2m |
m |
4 |
2 |
2 |
8 |
40 |
30 |
0.15 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
26 |
12m |
2m |
2m |
m |
3 |
2 |
1 |
10 |
20 |
40 |
0.2 |
1.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
27 |
14m |
3m |
3m |
m |
4 |
3 |
1 |
12 |
30 |
60 |
0.1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
28 |
15m |
3m |
2m |
m |
4 |
3 |
2 |
8 |
40 |
45 |
0.2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
28 |
8m |
2m |
m |
m |
3 |
2 |
0.5 |
10 |
20 |
60 |
0.1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
30 |
10m |
2m |
3m |
m |
4 |
1 |
0.5 |
12 |
30 |
40 |
0.15 |
1.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
21
Данные для решения задачи Д-2
Задача Д-2
№ |
a |
b |
c |
F1 |
F2 |
M1 |
M2 |
q |
α |
|
м |
м |
м |
кН |
кН |
кН·м |
кН·м |
кН/м |
град |
|
|
|
|
|
|
|
|
|
|
1 |
1.0 |
1.25 |
1.0 |
20 |
25 |
20 |
10 |
5 |
45 |
|
|
|
|
|
|
|
|
|
|
2 |
1.0 |
1.0 |
1.25 |
10 |
30 |
25 |
15 |
4 |
30 |
|
|
|
|
|
|
|
|
|
|
3 |
1.25 |
1.0 |
1.0 |
20 |
30 |
30 |
20 |
8 |
60 |
|
|
|
|
|
|
|
|
|
|
4 |
1.25 |
1.25 |
1.0 |
40 |
40 |
35 |
25 |
10 |
45 |
|
|
|
|
|
|
|
|
|
|
5 |
1.0 |
1.0 |
1.0 |
10 |
50 |
40 |
30 |
5 |
30 |
|
|
|
|
|
|
|
|
|
|
6 |
1.25 |
1.0 |
1.25 |
20 |
30 |
20 |
35 |
4 |
60 |
|
|
|
|
|
|
|
|
|
|
7 |
1.0 |
1.25 |
1.25 |
30 |
40 |
25 |
10 |
8 |
45 |
|
|
|
|
|
|
|
|
|
|
8 |
0.8 |
1.0 |
0.8 |
40 |
50 |
30 |
15 |
10 |
60 |
|
|
|
|
|
|
|
|
|
|
9 |
0.8 |
0.8 |
0.8 |
10 |
30 |
35 |
20 |
12 |
45 |
|
|
|
|
|
|
|
|
|
|
10 |
0.8 |
0.8 |
1.0 |
20 |
40 |
40 |
25 |
5 |
30 |
|
|
|
|
|
|
|
|
|
|
11 |
1.0 |
0.8 |
0.8 |
30 |
50 |
20 |
30 |
4 |
60 |
|
|
|
|
|
|
|
|
|
|
12 |
1.0 |
1.0 |
0.8 |
40 |
30 |
25 |
35 |
8 |
30 |
|
|
|
|
|
|
|
|
|
|
13 |
1.0 |
0.8 |
1.0 |
10 |
40 |
30 |
10 |
10 |
45 |
|
|
|
|
|
|
|
|
|
|
14 |
0.8 |
1.0 |
1.0 |
20 |
50 |
35 |
15 |
12 |
30 |
|
|
|
|
|
|
|
|
|
|
15 |
1.25 |
1.25 |
1.25 |
30 |
30 |
40 |
20 |
8 |
60 |
|
|
|
|
|
|
|
|
|
|
16 |
1.0 |
1.25 |
1.0 |
40 |
40 |
20 |
25 |
5 |
60 |
|
|
|
|
|
|
|
|
|
|
17 |
1.0 |
1.0 |
1.25 |
10 |
50 |
25 |
30 |
4 |
30 |
|
|
|
|
|
|
|
|
|
|
18 |
1.25 |
1.0 |
1.0 |
20 |
30 |
30 |
35 |
8 |
45 |
|
|
|
|
|
|
|
|
|
|
19 |
1.25 |
1.25 |
1.0 |
30 |
40 |
35 |
10 |
10 |
30 |
|
|
|
|
|
|
|
|
|
|
20 |
1.0 |
1.0 |
1.0 |
40 |
50 |
40 |
15 |
12 |
60 |
|
|
|
|
|
|
|
|
|
|
21 |
1.25 |
1.0 |
1.25 |
10 |
30 |
20 |
20 |
15 |
45 |
|
|
|
|
|
|
|
|
|
|
22 |
1.0 |
1.25 |
1.25 |
20 |
40 |
25 |
25 |
10 |
45 |
|
|
|
|
|
|
|
|
|
|
23 |
0.8 |
1.0 |
0.8 |
30 |
50 |
30 |
30 |
5 |
30 |
|
|
|
|
|
|
|
|
|
|
24 |
0.8 |
0.8 |
0.8 |
40 |
30 |
35 |
35 |
4 |
60 |
|
|
|
|
|
|
|
|
|
|
25 |
0.8 |
0.8 |
1.0 |
10 |
40 |
40 |
10 |
8 |
45 |
|
|
|
|
|
|
|
|
|
|
26 |
1.0 |
0.8 |
0.8 |
20 |
50 |
20 |
15 |
10 |
30 |
|
|
|
|
|
|
|
|
|
|
27 |
1.0 |
1.0 |
0.8 |
30 |
30 |
25 |
20 |
5 |
60 |
|
|
|
|
|
|
|
|
|
|
28 |
1.0 |
0.8 |
1.0 |
40 |
40 |
30 |
25 |
4 |
30 |
|
|
|
|
|
|
|
|
|
|
28 |
0.8 |
1.0 |
1.0 |
20 |
50 |
35 |
30 |
8 |
45 |
|
|
|
|
|
|
|
|
|
|
30 |
1.25 |
1.25 |
1.25 |
30 |
20 |
40 |
35 |
10 |
60 |
|
|
|
|
|
|
|
|
|
|
22
Примеры решения задач самостоятельной проектировочной работы
Задача К-1 Координатный способ задания движения точки
Координатным способом задан закон движения материальной точки.
2 2 31 3 3 .
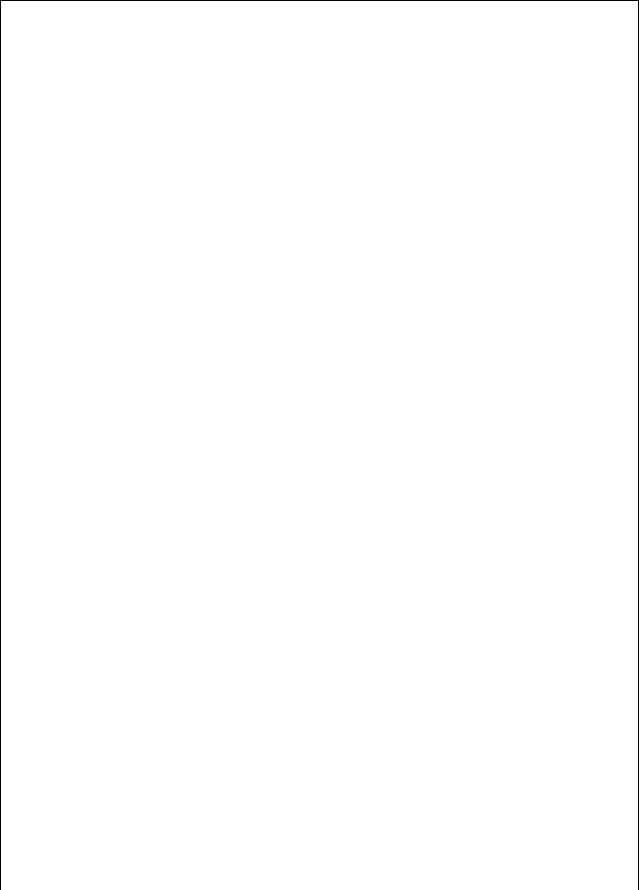
Построить траекторию движения, отметив на ней положение точки M в заданный момент времени. Для заданного момента времени t = 1c определить скорость, полное, нормальное и касательное ускорения точки, определить радиус кривизны траектории. Определить каким является движение:
ускоренным, равномерным или замедленным. |
|
|
|
|
|
|
|
|
|
|||||||
Решение: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1. |
Определяем траекторию. Исключаем время из закона движения точки. |
|||||||||||||||
|
|
|
|
|
, |
откуда |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
. |
|
||||||||
|
Складывая, получаем |
1 , |
|
откуда |
3 |
" #$ % 2& |
||||||||||
# % 1&. |
|
|
|
# % 4& % " #$ % 2& |
. |
|
|
|
|
|
|
|
||||
|
Преобразуем к виду: |
|
( % 4 |
|
|
|
|
|
|
|
|
|||||
|
Введем новые переменные: |
с обратным переходом |
|
|||||||||||||
|
$ $ % 2 |
|
||||||||||||||
|
|
|
|
|
|
|
($ $ |
2. |
% " $ |
|
|
|
|
|||
|
Получим уравнение |
квадратной |
параболы |
|
с |
|
ветвями |
|||||||||
|
4 |
|
||||||||||||||
направленными вниз и вершиной с координатами |
|
($ |
0 |
или |
|
($ 2. |
||||||||||
∙ |
при |
$ |
0 1 |
0 |
|
#Точка # 2, 4&&, |
|
|
|
|
, |
|
||||
Строим параболу: |
%0.75 |
|
|
|
0 |
|
|
|
|
4 |
|
|||||
∙ |
при |
$ |
2 |
|
#Точки # 1, 3.25& и # 3, . 3.25&& |
|
||||||||||
∙ |
при |
$ |
|
%3.0 |
|
#Точки #0, 1& и # 4, 1&& |
|
|
|
|||||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
23 |
|
|
|
|
|
|
|
|
|
|
y |
|
|
y1 |
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M0 |
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
4 |
|
|
|
|
|
|
x1 |
|
|
|
|
|
|
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
||
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
R |
|
|
M1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
an |
|
|
R |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
aτ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
1 |
|
2 |
3 |
4 |
|
x |
|
1 |
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
3 |
4 |
x |
|
|
|
Рис.1 |
|
|
|
|
|
|
|
|
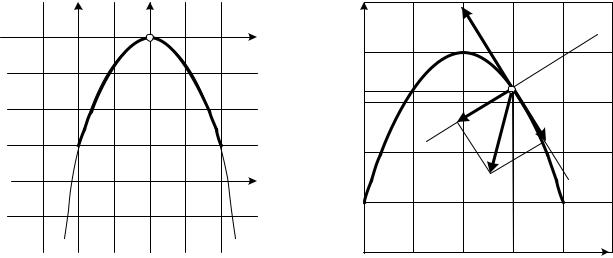
Рис.2 |
|
|
|
|
|
|||
Траектория незамкнута. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Определяем |
|
|
границы |
траектории, |
исходя |
из |
|
|
неравенства |
|||||||||||
%1 2 |
2 1. |
|
|
|
|
|
|
|
|
|
0 2 |
$ 2 4. |
|
|
||||||
Получим: |
|
|
|
|
|
|
|
, |
|
|
|
|
, |
|
|
|
||||
|
|
|
положение точки М при t= c. |
|
|
|
|
|
||||||||||||
2. Определяем%1 2 |
2 1 %2 2 $ % 2 2 2 |
|
|
|
||||||||||||||||
$3 2 2 |
|
2 2 60 2 2 ∙1 |
3 м. |
|
|
|
3 |
|
|
|
||||||||||
3 1 3 |
|
3 |
1 3 |
|
60 |
|
2 |
|
√3 |
|
1 3 ∙ |
3.25 м. |
|
|||||||
|
|
|
|
1 3 ∙ 7 |
2 |
9 |
4 |
|
||||||||||||
Показываем |
точку М на рисунке (рис.2). |
|
|
|
|
|
|
|
|
|||||||||||
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
3. Определяем скорость точки. |
|
|
2 |
|
|
|
|||||||
< |
2 2 |
|
|
|
|
|
|||||||
Для этого определяем проекции вектора скорости на координатные оси: |
|
||||||||||||
: $; |
|
< |
3 |
|
%2 ∙ 7 3 |
9 ∙ 3 |
% 3 |
∙ 3 , |
2 |
|
|||
< |
1 3 |
|
3 |
|
3 ∙ 72 |
|
|
|
|
. |
|||
: ; |
|
< |
|
|
|
3 |
3 9 ∙ 3 ∙ 3 |
||||||
При t=1c |
60 √ и |
120 |
#180 % |
||||||||||
>& 60 √ . |
|
|
|
|
|
|
|
|
|
|
|
||
Тогда |
: |
% ∙ √ % √ %1.81 м⁄с, |
|
|
|
|
|
||||||
|
|
: ∙ |
√ 2.72 м⁄с. |
|
|
|
|
|
|
||||
24
Изображаем вектор скорости на рисунке (рис.2). |
||||||
4. |
: A: |
: √1.81 |
|
2.72 |
|
3.27 м⁄с. |
Вычисляем модель вектора скорости: |
|
|
||||
|
|
|
|
|
|
|
|
Вычисляем ускорение точки. |
|
|
|
|
|
Для этого определяем проекции вектора ускорения на координатные оси: |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
DEFG ∙HIJFKG |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
B |
:; |
|
|
$C |
|
DEFK |
|
|
|
|
% |
∙ |
|
∙ |
% L |
|
|
∙ |
, |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
D ∙HIJ G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
B |
:; C |
|
D |
|
|
|
|
∙ |
|
∙ |
|
|
|
∙ . |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
60 |
|
|
|
|
|
120 % . |
||||||||||||||||||||
При |
t=1c. |
|
|
|
|
|
и |
|
|
||||||||||||||||||||||||||
Тогда |
|
B |
|
% |
L |
|
∙ % |
LE %1.10 |
смE, |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
B |
|
|
|
∙ % |
|
% |
E |
%3.29 |
м |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
ускорения |
|
|
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Изображаем |
вектор |
на рисункес |
(рис.2). |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
B AB |
|
|
B |
|
|
√1.10 |
|
|
3.29 |
|
3.47 с . |
|
|
|
|
|
|
|
|
||||||||||||||||
Найдем модуль ускорения: |
|
|
|
|
|
|
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E |
|
|
|
|
|
|
|
|
|
|||||
Проектируем вектор ускорения на направление вектора скорости: |
|
||||||||||||||||||||||||||||||||||
BN |
|
N |
|
|
|
|
N |
|
|
|
|
# |
|
.W &∙# . |
. X |
|
|
|
|
%2.13 |
сE. |
|
|||||||||||||
|
|
NOP∙QOP |
|
|
|
RNSQSTNUQUV |
|
|
&T.X ∙# .L& |
|
|
|
|
|
|
м |
|
||||||||||||||||||
Проекция отрицательна, то есть движение при t=1c. является замедленным.
|B Найденная| проекция по модулю равна касательному ускорению
N .
B |
AB |
B |
√3.47 |
2.13 |
|
2.74 с . |
Вычисляем нормальное ускорение: |
|
м |
||||
J |
|
Z |
|
|
|
E |
Показываем найденные ускорения на рисунке (рис.2).
5. [Вычисляем радиус3.9мкривизны. траектории в данной точке:
NE .XE
Q\ .X"
Ответ: М(3;3,25), V=3,27м/с, а=3,47м/с2, аτ=2,13м/с2, аn=2,74м/с2,
Точка совершает криволинейное замедленное движение.
|BZ|
ρ=3,9м.
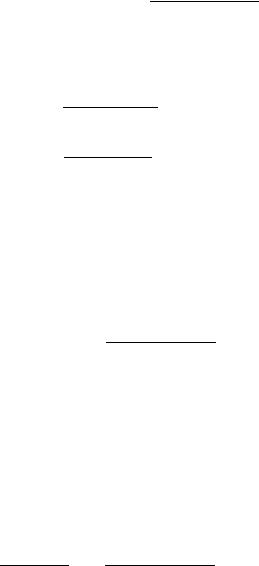
Задача К-2 Плоскопараллельное движение твердого тела
Кривошип ОА вращается вокруг шарнира О с постоянной угловой скоростью ω, приводя в движение последующие звенья кривошипношатунного механизма.
25
В некоторый момент времени t механизм занимает показанное на схеме положение. Для этого момента времени построить план скоростей. Определить положение МЦС для каждого звена механизма, найти скорости обозначенных буквами точек механизма и угловые скорости всех звеньев и колес механизма. Найти вектора полного ускорения точек А и В, и угловое
Дано: |
] ] |
^_ |
1 |
|
|
с |
b |
60 |
|
, b |
30 |
|
, b |
120 |
|
, |
b |
150 |
|
, |
|||
|
|
рад, |
|
|
|
|
|
|
|
|
" |
|
|
||||||||||
ускорение звена АВ. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
OA = 70 см, |
AB = 70 см, |
KL = 70 см, |
R = 20 см. |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ϕ4
K  ϕ3
ϕ3
B
|
A |
ϕ2 |
ω |
ϕ1 |
|
|
O |
|
Рис.3
Решение:
Найдем скорости обозначенных буквами точек механизма и угловые скорости всех звеньев и колес механизма
Механизм состоит из пяти тел: звеньев ОА, AB, KL, колеса B и ползуна L. Пронумеруем их и рассмотрим их движение.
1. Тело 1 (стержень ОА). Движение вращательное. |
|||||
Центр скоростей находится в неподвижной точке О, то есть P1=O. |
|||||
Угловая скорость задана, то есть |
|
рад. |
|||
Определяем модуль скорости |
точки А. |
|
|||
|
] ] 1 с |
||||
Скорость |
направлена в сторону вращения перпендикулярно отрезку ОА. |
||||
15 с |
|
|
|
|
:_ ] ∙ |cd| 1 ∙ 15 |
см |
|
|
|
|
|
Ее.модуль:Pопределяется_ |
по формуле Эйлера: |
||||
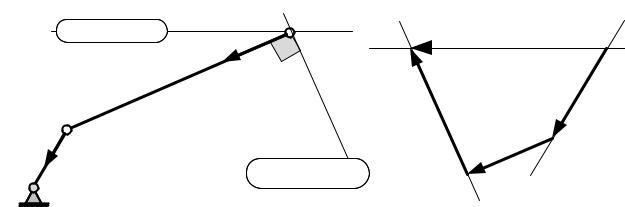
2. Тело 2 (стержень AB). Движение плоскопараллельное.
Скорость точки В параллельна опорной плоскости, то есть горизонтальна.
26
Восстанавливая перпендикуляры к направлениям скоростей в точках А и В, найдем точку Р2 – мгновенный центр скоростей тела 2.
Вектор |
|
задает направление вращения тела 2 относительно точки Р2 . |
||||||||
Видно, |
что_ угловая скорость |
|
направлена по ходу часовой стрелки. |
|||||||
:P |
|
|
|
|
||||||
Направление вращения |
] |
определяет |
направление скорости точки В |
|||||||
(влево). |
|
|
|
] |
|
|
|
|||
Измеряем отрезки АР2 и ВР2 . |
|
Получаем: АР2 = 119 см и ВР2 = 69 см. |
||||||||
] |
|
: |
⁄|Аf | 15⁄119 0.13 с |
|
||||||
|
|
А |
|
|
|
|
2: |
рад. |
|
|
Находим угловую скорость тела |
|
|
||||||||
:g ] |
∙ |hf | 0.13 ∙ 69 8.97 смс . |
|
||||||||
Находим модуль скорости точки В: |
|
|||||||||
 P2
P2
R |
ω 2 |
vL |
|
L 90° |
P4 |
|
|
ω 4 |
|
90° |
K |
|
|
R |
|
vK R |
90° |
vB |
B |
R |
ω3 |
vA |
|
A |
P |
90° |
3 |
|
ω1 |
O |
|
|
|
P |
|
1 |
Рис.4 3. Тело 3 (колесо B с радиусом ВК).
Мгновенный центр скоростей тела 3 расположен в точке соприкосновения
Видно, |
:P |
|
|
|
колеса В с опорной плоскостью, то есть в точке Р3 . |
||||
Вектор |
|
|
] |
|
|
задает направление вращения тела 3 относительно точки Р3 . |
|||
|
чтоВ угловая скорость |
|
направлена против хода часовой стрелки. |
|
|
|
|
|
|
|
|
|
27 |
|
|
|
Направление вращения |
определяет направление скорости точки К: |
||||||||||
Она направлена влево, |
перпендикулярно |
к отрезку КР |
|
. |
|||||||
] |
|
|
|
3 |
|
||||||
Измеряем отрезок и КР3 . |
Получаем: КР3 = 39 см. |
|
|||||||||
] |
|
: |
⁄|hf | 8.97⁄20 0.45 с |
|
|
|
|||||
|
|
g |
|
|
|
рад. |
|
|
|
||
Находим угловую скорость тела : |
|
|
|
|
|||||||
4.: |
|
] |
|
∙ |kf | 0.45 ∙ 39 17.55 с . |
|
|
|
||||
j |
|
|
|
|
|
см |
|
|
|
||
Находим модуль скорости точки K: |
|
|
|
|
|||||||
Тело 4 (стержень KL). Движение плоскопараллельное.
Скорость точки K направлена перпендикулярно к отрезку КР3 .
Скорость точки L направлена по вертикали (вдоль направляющих ползуна). Восстанавливая перпендикуляры к направлениям скоростей в точках K и L,
найдем точку Р4 – мгновенный центр скоростей тела 4. |
|
|
||||||||||||||
Вектор |
|
|
задает направление вращения тела 4 относительно точки Р4 . |
|||||||||||||
Видно, |
чтоj |
угловая скорость |
|
направлена по ходу часовой стрелки. |
||||||||||||
:P |
|
|
|
]" |
определяет" |
направление скорости точки L |
||||||||||
Направление вращения |
||||||||||||||||
(вверх). |
|
|
|
|
|
] |
|
|
|
|
|
|
|
|
|
|
Измеряем отрезки KР4 и LР4 . |
|
Получаем: KР4 = 39.5 см и LР4 = 51 см. |
||||||||||||||
] : |
|
⁄|kf | 17.55⁄39.5 0.45 |
|
с |
|
|
||||||||||
" |
j |
|
" |
|
|
|
4: |
|
|
|
рад. |
|
|
|||
Находим угловую скорость тела |
|
|
с . |
|
|
|
|
|||||||||
5.: ] |
∙ |mf | 0.45 ∙ 51 22.95 |
|
|
|
|
|
||||||||||
l |
" |
|
|
" |
|
|
|
|
|
см |
|
|
|
|
|
|
Находим модуль скорости точки L: |
|
|
|
|
|
|
|
|
||||||||
Тело 5 (ползун L). |
|
|
|
|
|
|
|
|
|
|
|
|
||||
Движение тела 5 поступательное. |
|
|
|
|
|
|
см |
|||||||||
Скорость точки L направлена вверх, а ее модуль равен l |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
звена АВ |
с . |
|
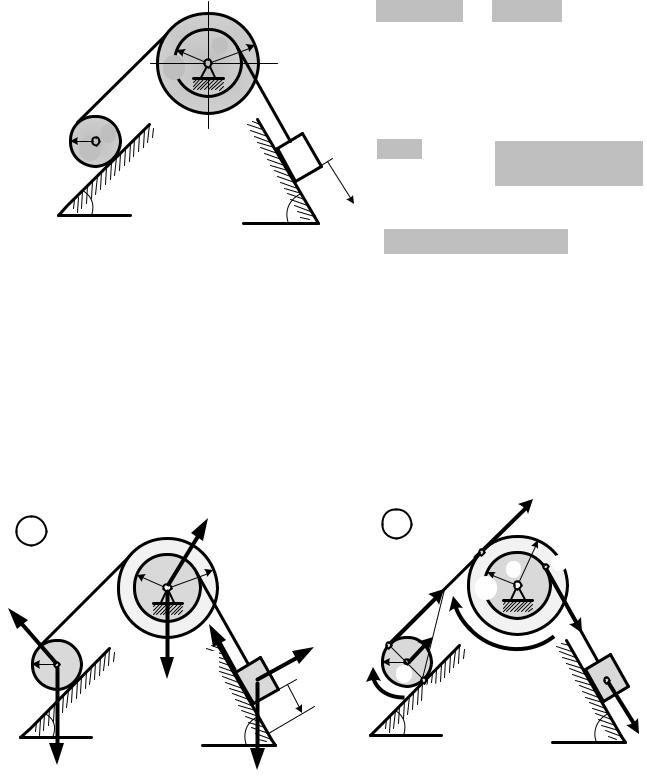
Определим ускорения точек А и В и угловое ускорение : 22.95 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
направление aB |
|
|
|
|
B |
|
|
aB |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
R |
R |
aA |
= aAn |
O |
|
Rn |
90° |
aB A |
aВА |
|
R aRBnA aA
направление aВА
Рис.5
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
28 |
|
|
|
|
|
||
|
Кривошип ОА вращается равномерно. Поэтому касательное (вращательное) |
|||||||||||||||||||||||||
ускорение точки А равно нулю, а полное ускорение точки А равно ее |
||||||||||||||||||||||||||
|
Чтобы |
|
BP |
BP |
J |
] |
|
∙ cd 1 |
|
∙ 15 15 см⁄с |
. |
|||||||||||||||
нормальному (центростремительному) ускорению: |
||||||||||||||||||||||||||
|
В |
|
|
|
BP |
BP |
|
BP |
J |
BP |
Z . |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
J |
|
найти_ |
ускорение_ |
точки В применим теорему о сложении ускорений: |
||||||||||||||||||||
|
|
|
|
|
BPgJ_ |
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
||||
|
B |
приведеннойg |
формуле_ g_ направлениеg_ |
и величина уже известна. |
||||||||||||||||||||||
|
|
] |
∙ dh 0.13 ∙ 70 1.18 см⁄сZ |
(перпендикулярно отрезку ОА) и |
||||||||||||||||||||||
Направление |
|
|
известно, а его величина |
находится_по формуле: |
||||||||||||||||||||||
BP |
Известныg_ линии действия ускорений |
|
|
|
J |
|
(см. рис.). |
|||||||||||||||||||
|
(параллельно опорной плоскости). |
Построимg_ |
план ускорений для точки В, |
|||||||||||||||||||||||
|
|
|
BP |
|
|
|
|
|
||||||||||||||||||
начавg |
построение с известных векторов |
|
отрезки_ |
|
|
|
||||||||||||||||||||
|
Bg_ 20.5 см⁄с |
|
|
Bg |
27.5 см⁄с |
|
, найдем, что |
|||||||||||||||||||
|
Замерив на чертеже соответствующиеBP |
|
и BPg_ |
|
|
|||||||||||||||||||||
|
Z |
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|||
|
Направление векторов также определяется по чертежу. |
|||||||||||||||||||||||||
|
|
|
|
|
n_g |
BgZ_⁄dh 20.5⁄70 0.3 рад⁄с . |
||||||||||||||||||||
|
Угловое ускорение звена АВ определим по формуле: |
|||||||||||||||||||||||||
Ответ: VA=15см/с, VB=8,97см/с, VK=17,55см/с, VL=22,95см/с, ω2=0,13рад/с, ω3=0,45рад/с, ω4=0,45рад/с, аА=15см/с2, аВ=27,5см/с2, εАВ=0,3рад/с2.
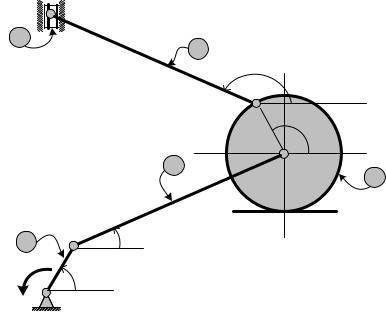
Задача Д-1
Система тел А, В, C, находящаяся в начальный момент времени t t в состоянии покоя, начинает двигаться под действием сил тяжести.
Определить скорость тела А в тот момент времени, когда оно пройдет путь S, учитывая трение скольжения тел. Определить время, за которое тело пройдет путь равный S.
29
|
B |
RB |
|
mA |
2m ; |
a = 10 ñì = 0.1 ì ; |
|
|
|
mB = m ; |
R = 4a = 40 ñì = 0.4 ì ; |
||
|
r B |
|
|
|||
|
|
|
|
= m ; |
B |
|
|
|
|
|
mÑ |
rB = 2a = 20 ñì = 0.2 ì ; |
|
C |
|
|
A |
m = 10 êã; |
RC = a = 10 ñì = 0.1 ì ; |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
r C |
|
|
|
|
|
|
α |
|
β |
S |
α |
30°; |
|
|
β = 60°; |
μ = 0.1; |
||||
|
|
|||||
Рис.6
Считать, что качение тел происходит без проскальзывания. Нити считать нерастяжимыми и невесомыми. Решение выполнить, используя теорему об изменении кинетической энергии механической системы. Даны углы α и β, а также коэффициент трения скольжения µ. Даны массы тел и радиусы колес В
иС. Решение:
1. Изобразим на схеме механической системы (рис. а) все внешние силы:
|
|
R |
|
|
|
R |
|
|
|
|
|
|
|
vF |
|
|
|
а |
|
NB |
|
б |
|
|
RB |
|
|
|
|
|
|
||||
|
|
|
|
|
|
F |
|
|
|
|
RB |
|
|
|
|
|
|
|
B |
|
|
|
|
B |
E |
|
R |
|
|
|
|
r B |
|
||
r B |
|
|
R |
|
|
R |
||
NC |
|
|
|
vH |
|
|
|
vE |
|
|
|
|
|
|
|
|
|
|
|
R |
H |
|
R |
|
|
|
|
|
N A |
|
|
|
|
||
|
|
|
vC |
|
|
A |
||
C |
R |
A |
RC |
|
|
ωB |
|
|
FTP |
|
|
|
|
|
|||
RC |
|
|
C |
|
|
|
|
|
R |
|
ω |
|
|
|
|
||
|
PB |
S |
D |
|
|
R |
||
|
|
C |
|
|
vA |
|||
α |
|
β |
|
α |
|
|
|
|
|
|
|
|
|
β |
|||
R |
R |
|
PC |
||
P |
||
|
A |
|
Рис.7 |
Рис.8 |
2. Обозначим буквами В и С точки в центрах колес В и С. Обозначим буквой D точку касания колеса C с плоскостью. Обозначим буквами E, F и H точки соприкосновения колес с нитями.