

6267
.pdf50
δφ 3δφ . |
(3) |
Используя (3) перепишем уравнение (2):
Fa 3δφ2 +RB 2a δφ2 +M δφ2 = 0.
откуда найдем искомую реакцию:
RB = - (M/2a + 1.5F).
Рассуждая аналогично, определим реакцию RС (рис.16, г.)
-Fa δφ1 +RС 2a δφ2 -M δφ2 = 0,
δφ δφ ,
-Fa +RС 2a -M = 0.
RС = M/2a + 0.5F.
Чтобы убедиться в правильности найденного решения, составим уравнение Σ MD(лев) = 0:
– RА·a – RB·3a + M – R С·5a = – 2 F·a + (M/2a + 1.5F)·3a + M – (M/2a + 0.5F) ·5a = – 2 F ·а +1.5M+4.5F·a + M – 2.5M - 2.5F=0.
Задача 4.2.
Определить реакцию опоры В составной балки (рис.17, а).
Решение.
Рассматриваемая составная балка образована из двух элементарных балок, соединенных шарниром D. В соответствии с приведенным выше планом отбрасываем опору В, заменяя ее неизвестной реакцией RB.
Сообщаем точке В возможное перемещение δsB = ВВ´, в результате чего все незакрепленные точки балки получат возможные перемещения.
Для построения моды балки проводим прямую линию через точку В´ и неподвижную точку А левой элементарной балки – AD и определяем таким образом положение ее граничной точки D´. После этого переходим к рассмотрению правой элементарной балки и определяем положение ее крайней правой точки, проводя прямую через точку D´ и неподвижную точку С (рис. 17, б).
Уравнение (4.3) для нашей задачи примет вид:

51
RB δsB + M δφA + PδsP = 0.
Выражая возможные перемещения δsB и δsP через δφA, получим:
RB aδφA + M δφA + P·2aδφA = 0,
откуда, поделив на δφA ¹ 0, найдем искомую реакцию:
RB = – ( M/a + 2P) = – 3 P.
Отметим, что в этом примере не удается проверить правильность найденного результата, если дополнительно не определить реакцию RA. Поэтому определим также и эту реакцию.
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M = Pa |
|
|
|
|
|
|
|
|
|
P |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
а |
|
|
|
|
В |
|
а |
|
|
|
D |
а |
|
|
|
|
С |
а |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D´ δsD |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
δsB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
б δφА |
|
|
|
|
В´ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
δsP |
P |
|||||||||||||||||||||||
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
А |
|
|
|
|
|
|
В |
|
|
|
|
|
|
|
D |
|
|
|
|
С |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
RB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
в |
А´ |
δsA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
δφC |
|
δsP |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
δφB |
|
|
M |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D δsD |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
|
|
|
|
|
В |
|
|
|
|
|
|
|
|
|
|
|
|
|
С |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
RA |
|
|
|
|
|
|
|
|
|
|
|
|
|
D´ |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис. 17
52
Неподвижная опора А эквивалентна двум линейным связям. Горизонтальной связи соответствует составляющая XA , вертикальной – YA .
Рассматриваемая составная балка загружена системой параллельных сил, поэтому реакция этой опоры направлена вертикально: XA = 0, YA = RА .
В соответствии с приведенным выше планом отбрасываем вертикальную связь в точке А, заменяя ее неизвестной реакцией RА.
Сообщаем точке А возможное перемещение δsА = АА´, в результате чего все незакрепленные точки балки получат возможные перемещения.
Для построения моды балки проводим прямую линию через точку А´ и неподвижную точку В элементарной балки ABD и определяем таким образом положение ее граничной точки D´. После этого переходим к рассмотрению правой элементарной балки и определяем положение точки приложения силы Р, проводя прямую через точку D´ и неподвижную точку С (рис. 17, в).
Уравнение (4.3) для нашей задачи примет вид:
RA δsA – M δφB – PδsP = 0.
Выражая возможные перемещения δsА и δsP через δφВ, получим:
RАaδφВ – M δφВ – PaδφВ = 0,
откуда, поделив на δφВ ¹ 0, найдем искомую реакцию:
RА = (M/a + P) = 2P.
Чтобы убедиться в правильности найденного решения, составим уравнение Σ MD(лев) = 0:
– RА·2a – RB·a + M = – 2 P·2a – (– 3 P) ·a + M = – 4 Pа + 3 Pа + Pа = 0.
5. Принцип Даламбера – Лагранжа
Этот принцип, представляет собой сочетание двух уже известных нам принципов: принципа Даламбера и принципа возможных перемещений Лагранжа и формулируется следующим образом:
В каждый момент времени сумма работ всех активных сил и сил инерции на любых возможных перемещениях системы, подчиненной
идеальным, стационарным и двухсторонним связям, равна нулю: |
|
∑(Fi + Φi) δri = 0. |
(5.1) |

53
Напомним, что связь считается идеальной, если сумма работ всех сил реакций связей на любом возможном перемещении системы равна нулю; стационарной, если ее уравнение не содержит зависимости от времени; и двухсторонней или удерживающей, если в результате всех возможных перемещений, точки системы не могут освободиться от данной связи.
При определении ускорения с помощью принципа Даламбера – Лагранжа рекомендуется придерживаться следующего порядка решения задачи:
1)приложить к телам системы активные силы, реакции связей, не являющихся идеальными, и силы инерции;
2)сообщить одному из тел системы возможное перемещение, совпадающее по направлению с ускорением этого тела;
3)составить уравнение принципа Даламбера – Лагранжа;
4)выразить ускорения и возможные перемещения каждой i-ой точки системы через, соответственно, ускорение и возможное перемещение какой либо одной j-ой точки с учетом зависимостей:
ai /aj = vi /vj = si /sj = δsi /δsj ;
5) определить искомое ускорение.
Уравнение принципа Даламбера – Лагранжа в учебной литературе носит также название общего уравнения динамики.
Задача 5.1.
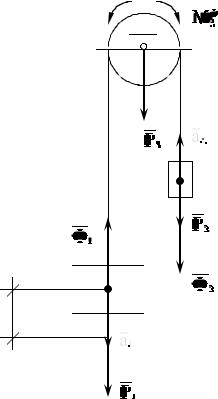
Два тела с массами m1 и m2 связаны между собой гибкой и нерастяжимой нитью, перекинутой через блок, масса которого m3 и радиус r (рис.18).
Пренебрегая массой нити и трением, определить ускорение груза 1. Применим к решению задачи общее уравнение динамики
∑3 (Fi a + Fi )×δri = 0 i=1
Покажем на схеме активные (задаваемые) силы Р1 , Р2 и Р3 .
54
ξ3
 O
O
δS1
Рис.18
Приложим силы инерции, предположив, что тело I опускается с ускорением а1 . Так как тело I движется поступательно, то сила инерции этого
груза выражается вектором
Φ1 = −m1a1 .
Сила инерции тела 2 выражается соответственно вектором
Φ2 = −m2 a2 .
Сила инерции блока 3, вращающегося вокруг неподвижной оси с угловым ускорением ε3 , приводится к паре, момент которой
МФ = −J |
0 |
ε |
3 |
3z |
я |
Сообщим системе возможное перемещение и составим общее уравнение динамики:
Р1δS1 − Ф1δS1 − M 3Фδϕ3 − Р2δS2 − Ф2δS2 = 0
где δS1 , δS2 - возможные перемещения 1-го и 2-го тела соответственно, а δϕ3 - угол поворота блока 3.
Учитывая, что нить нерастяжима и, следовательно, а2 = а1 , будем иметь:
Φ1 = m1a1 ; Φ2 = m2 a2 ;
|
|
|
|
|
|
|
|
|
55 |
|
Ф |
= J0 я ε3 |
= |
m r 2 |
× |
a |
= |
m r |
× a1 ; |
М |
|
3 |
1 |
3 |
|||||
3z |
2 |
r |
2 |
||||||
а также δS2 = δS1 |
и δϕ3 |
= δS1 . |
|
||||||
|
|
|
|
|
|
|
r |
|
|
Подставив эти выражения в уравнение, получим:
m1 gδS1 - m1a1δS1 - m3 a2δS1 - m2 gδS1 - m2 a1δS1 = 0 2
После деления всех членов уравнения на δS1 . Находим:
a1 |
= |
|
g(m1 − m2 ) |
|
m1 |
+ 0,5m3 + m2 |
|||
|
|
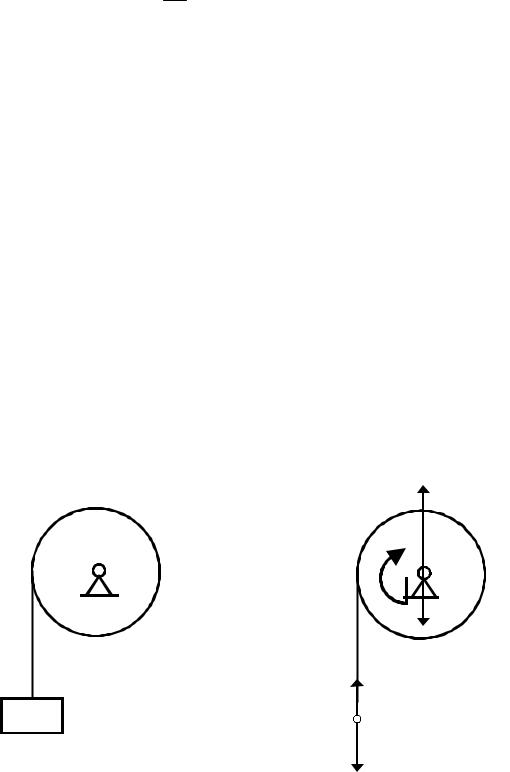
Задача 5.2. Определить ускорение груза A, принимая барабан B за однородный цилиндр и полагая mA = mB (рис. 19, а).
Решение.
В соответствии с принципом Даламбера прикладываем к системе активные силы PA и PB , и реакцию подшипника NB (рис. 19, б).
Силы инерции поступательно движущегося тела A заменяем равнодействующей
|ΦA| = ΦA = mA aA ,
а силы инерции барабана B моментом
MB ин = JBεB = (mBR2/2) εB.
а) |
|
y |
б) |
|
|
y |
|||||
|
|
||||||||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
B |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
NB |
|
|
|
|
|
B |
|
|
MBин |
||||||
|
|
|
|
|
|||||||
|
|
|
x |
|
|
|
|
x |
|||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O
PB
ΦA
A  A
A
С
ообщим телу A нашей системы с одной степень
ю
свободы
возмож
ное
переме
щение
PA |
δsA |
, |
Рис. 19
56
коллинеарное вектору ускорения aA. При этом барабан B получит возможное угловое перемещение δφB .
Запишем уравнение (5.1), которое для нашей задачи примет вид:
(PA – ΦA) δsA – MBин δφB = 0
или
(mA g – mA aA) δsA – JBεB δφB = 0. |
(1) |
Выразим в последнем соотношении δφB и εB соответственно через δsA и aA. С этой целью воспользуемся зависимостью:
ωB = vA/R, |
|
дифференцируя и интегрируя которую, получим: |
|
εB = aA/R, δφB = δsA/R. |
(2) |
Подставляя (2) в (1), придем к выражению:
(mA g – mA aA) δsA – ( mBR2/2) (aA/R) (δsA/R) = 0,
откуда, поделив на δsA ≠ 0, найдем искомое ускорение груза A: aA = 2/3 g.
ЛИТЕРАТУРА
1.Диевский, В.А. Теоретическая механика: Учебное пособие. 2-е изд., испр.
– СПб.: Издательство «Лань», 2008. – 320 с.
2.Мещерский, И.В. Сборник задач по теоретической механике: Учебное пособие / И.В. Мещерский. −М.: Наука, 1986. − 448 с.
3.Аистов А.С. Теоретическая механика. Динамика. Учебное пособие / А.С.Аистов, А.С.Баранова, Н.Ю. Трянина.- Н.Новгород: Нижегородский государственный архитектурно-строительный университет.
4.Куликов, И.С. Сборник задач по теоретической механике: Учебное пособие / И.С. Куликов, Н.Ю. Трянина. – Н. Новгород: Изд-во ННГАСУ, 2002. – 84 с.

57
Штенберг Валерия Борисовна
ПРАКТИЧЕСКИЕ ЗАНЯТИЯ ПО АНАЛИТИЧЕСКОЙ МЕХАНИКЕ
Учебно-методическое пособие для подготовки к практическим занятиям
по дисциплине «Аналитическая механика» для обучающихся по направлению подготовки 08.03.01 Строительство
Профиль Производство и применение строительных материалов, изделий и конструкций
Федеральное государственное бюджетное образовательное учреждение высшего образования «Нижегородский государственный архитектурно-строительный университет»
603950, Нижний Новгород, ул. Ильинская, 65. http://www. nngasu.ru, srec@nngasu.ru