

книги / Моделирование цилиндрических линейных вентильных двигателей для различных отраслей промышленности
..pdf
|
|
|
|
2 |
|
r2 |
dr |
|
|
|
Rп3 |
|
|
|
|
|
|
|
r |
, |
(3.9) |
|
0 |
|
с |
( b |
) |
|||||
|
|
|
н |
|
r |
|
|
|
||
|
|
|
|
|
|
|
м |
|
|
|
где r2 D22 – радиус ротора.
Сопротивление воздушного зазора рассчитывается по площади половины полюсного деления (вдоль которой поток имеет одно направление):
R |
|
|
|
1 |
|
rвн |
dr , |
(3.10) |
|||
|
|
|
|
|
|||||||
|
|
|
0 |
r |
r |
|
|
||||
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
где rвн r2 – внутренний радиус статора. |
|
||||||||||
Сопротивление зубца статора: |
|
|
|
|
|
|
|||||
|
1 |
|
|
|
r |
drr , |
|
||||
Rз |
|
|
|
ч |
(3.11) |
||||||
2 |
с |
b |
|||||||||
|
|
|
|
0 |
з |
r |
|
|
|||
|
|
|
|
|
|
|
|
|
вн |
|
|
где rч r1 т – внешний радиус |
чашки |
статора; т |
– толщина |
||||||||
корпусной трубы статора; |
r D1 |
– внешний радиус статора. |
|||||||||
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Сопротивление якоря-корпуса будет рассчитано как параллель- |
|||||||||||
ное соединение сопротивлений якоря и корпуса: |
|
||||||||||
|
|
R |
|
|
Rя Rк |
|
. |
|
(3.12) |
||
|
|
|
|
|
|||||||
|
|
я.к |
|
Rя Rк |
|
|
|
||||
|
|
|
|
|
|
|
|
||||
Ярмо статора выполняется с тремя пазами, угловой размер каждого составляет п 34° . В пазах находятся выводы обмоток, ко-
торые соединяются между собой и образуют трёхфазную обмотку. В этом случае площадь стали, по которой проходит магнитный поток ярма, рассчитывается по формуле Qя Qя (1 п /120°), где
Qя ((r1 т )2 (r1 т hя )2 ) .
51
Магнитное сопротивление ярма |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
Rя |
|
|
|
2 |
|
. |
|
|
|
|
(3.13) |
||||
|
|
|
|
3 |
0 с Qя |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Сопротивление корпуса |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
Rк |
|
|
|
2 |
|
|
, |
|
|
|
|
(3.14) |
|||
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
0 к Qк |
|
|
|
|
|
||||||
где Q ( 2 |
D 2 ) . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
к |
т |
1 |
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Магнитодвижущая сила, создаваемая магнитом, |
|
||||||||||||||||||
|
|
|
|
|
|
|
Fм Hc |
hм. |
|
|
|
|
|
|
|
(3.15) |
|||
Общее сопротивление магнитной цепи |
|
|
|
|
|
||||||||||||||
|
Rоб Rм 2 Rп R |
Rя.к 2 Rз 2 R |
(3.16) |
||||||||||||||||
|
|
|
|
|
|
|
. |
||||||||||||
|
R |
R |
2 |
R 2 |
R |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
я.к |
|
|
|
з |
|
|
||
Магнитный поток холостого хода в воздушном зазоре |
|
||||||||||||||||||
|
|
0 |
|
Em |
|
|
|
|
|
|
R |
|
|
|
|
. |
|
|
(3.17) |
|
|
|
R Rя.к |
2 Rз |
|
|
|
||||||||||||
|
|
|
|
Rоб |
2 R |
|
|
|
|||||||||||
Расчёт магнитной цепи подобным образом является приемлемым для оценочного определения усилия развиваемого двигателем в номинальных режимах работы. Однако дальнейший расчёт энергетических характеристик двигателя и сравнение их с полученными с помощью ANSYS Maxwell выявил значительные погрешности [77]. Эти погрешности обусловлены тем, что расчёт по данной методике [72] проводился без учёта насыщения магнитной системы ЦЛВД в отличие от ANSYS Maxwell. Поэтому математическую модель с данным упрощённым вариантом расчёта магнитной цепи использовать для проектирования двигателя не рекомендуется. Целесообразнее использовать расчёт магнитной цепи, учитывающий насыщение её элементов. Данный расчёт учитывает МДС, наводимую катушками двигателя. Она может достигать до четверти общей МДС цепи, что играет значительную роль в насыщении магнито-
52
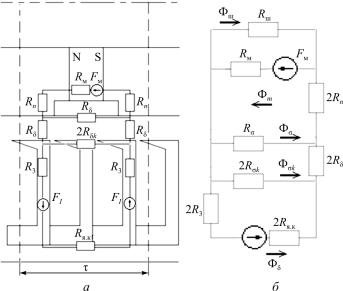
провода двигателя. Наличие второго источника МДС в свою очередь делает необходимым решение системы уравнений Кирхгофа, для нахождения магнитного потока на разных участках магнитной цепи. Схемы замещения магнитной цепи на рис. 3.3, а, б в данном случае примут вид схем на рис. 3.4, а, б соответственно.
Рис. 3.4. Схема магнитной цепи (а) и магнитной цепи для расчёта (б)
Учёт насыщения подразумевает использование кривых намагничивания сталей двигателя, что делает аналитическое решение системы уравнений Кирхгофа невозможным. Поэтому расчёт магнитной цепи необходимо вести численным методом. Для реализации данного расчёта можно воспользоваться любой программной средой. Математическая модель двигателя была построена в про-
грамме Mathcad.
Относительная магнитная проницаемость участков цепи из магнитомягких материалов зависит от напряжённости магнитного поля в них:
53

|
B |
, |
(3.18) |
0 H |
где H и B – это соответственно напряжённость магнитного поля и магнитная индукция выбранного участка магнитной цепи. Система уравнений Кирхгофа решается относительно магнитного потока на разных участках магнитной цепи. Таким образом, целесообразно относительную магнитную проницаемость выразить через магнитный поток на участке цепи Ф следующим образом:
|
|
|
|
|
|
|
|
|
S |
|
|
|
, |
(3.19) |
|
0 H (B) |
0 |
|
|
||||
|
|
|
S H |
|
|
||
|
|
|
|
|
S |
|
|
где S – площадь поперечного магнитному потоку сечения участка магнитной цепи. Функция H (B) обусловлена кривой намагничива-
ния материала участка. В Mathcad данная функция реализована интерполированием табличных значений кривой намагничивания материала. Таким образом, сопротивления участков цепи из магнитомягких материалов примут вид функций R( ) .
Таким образом, формулы магнитных сопротивлений участков цепи (3.1) и (3.2) преобразуются соответственно:
|
|
|
|
|
i |
|
|
|
|
|||
|
ri 2 |
Hi |
|
|
|
dr |
|
|
||||
|
|
|
|
|
|
|
||||||
Rri |
|
|
Si (r) |
, |
(3.20) |
|||||||
|
|
i |
|
|
|
|
||||||
|
r |
|
|
|
|
|
|
|
|
|||
|
i1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j |
|
|
|
|||
|
|
|
lj H j |
|
|
|
|
|
||||
|
|
S |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||
R |
|
|
|
|
|
|
j |
. |
|
(3.21) |
||
|
|
|
|
|
|
|
||||||
|
zj |
|
|
j |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Поскольку магнитная цепь значительно усложнилась, Rм теперь является сопротивлением всей параллельной ветви цепи
ивключает в себя как собственное сопротивление магнита Rм, так
и2 сопротивления Rп1 :
54
Rм Rм 2 Rп1.
Преобразовав уравнения (3.5)–(3.8), получим:
Rп ( ) Rп2 ( ) Rп3 ( ) ,
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
( hм ) Hс3 |
|
|
|
|
|
|
||
|
R |
( ) |
|
|
Q |
, |
|
|
|||||
|
|
|
|
|
|
|
|||||||
|
п1 |
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rм |
|
|
|
2 |
|
|
|
|
dr |
|
Rп2 |
( ) |
|
Hс3 |
|
|
|
, |
||||||
|
|
|
|
|
|
||||||||
r h |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
r0 |
|
|
|
|
м |
|
|
|
|
|
(3.21)
(3.22)
(3.23)
|
|
r2 |
|
|
2 |
|
|
|
dr |
|
|
Rп3 |
( ) |
|
Hс3 |
|
|
, |
(3.24) |
||||
|
|
|
|
|
|||||||
r b |
|
|
|||||||||
|
|
|
|
|
|
|
|
||||
|
|
rм |
|
|
н |
|
|
|
|
|
|
где Hс3 (B) – функция кривой намагничивания стали 3. Сопротивление полюсного рассеяния Rп в данном случае рас-
считывается как
|
|
b |
H |
|
|
|
|
||
|
с |
|
|
|
|
||||
|
|
н |
|
|
R |
|
|||
R |
( ) |
|
|
Q п |
|
. |
|||
|
|
|
|
||||||
п |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||
Функция магнитного сопротивления зубца примет вид
|
D1 м |
|
|
|
|
dr . |
||
Rз ( ) |
2 |
|
Hс3 |
|
||||
|
|
|||||||
|
|
|
||||||
|
|
|||||||
|
r2 |
|
|
2 r bз |
|
|||
(3.25)
(3.26)
Важно заметить, что использование интеграла позволяет рассчитать магнитное сопротивление с учётом насыщения для сечений на каждом элементарном приращении зубца dr , а не только для средних сечений на каждую 1 3 зубца как в широко используемых
3 зубца как в широко используемых
проектировочных методиках [78].
55
Расчёт сопротивления магнитного рассеяния одной коронки зубцов R к представляет собой сумму сопротивления открытия паза,
рассчитанного по формуле (3.2), половины толщины зубца, рассчитанного по формуле (3.21) и интегрального уравнения сопротивления треугольного зубца:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
k |
|
|
|
H |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
S(h) |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
bз H |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
b |
|
|
|
S |
k |
|
|
|
k |
|
|
|
|
0 |
S |
k |
S(h) |
|
|||||||||||
R к ( k ) |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
||||||
|
|
S |
|
2 |
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
0 |
|
k |
|
|
|
|
k |
|
|
|
H |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S(h) |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
0 |
Sk S(h) |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
где Sk – максимальное ортогональное сечение треугольного зубца; dh – элементарное линейное приращение зубца; S(h) – сечение
зубца как функция от места.
Сопротивление штока представляет собой сумму продольного сопротивления штока, рассчитанного по формуле (3.2), двух поперечных сопротивлений штока, рассчитанных по формуле (3.1), и двух сопротивлений полюса, рассчитанных по формуле (3.20):
|
|
|
h |
|
|
|
|
ш |
|
|
||
|
h |
р |
|
|
rш |
dr |
rд.м |
H |
|
dr |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|||||||||
Rш ш |
т |
|
2 |
|
|
|
|
S(r) |
, |
|||
|
|
|
|
|
||||||||
0 |
|
|
0 i Si (r) |
|
ш |
|
||||||
|
Sш |
r |
r |
|
|
|
||||||
|
|
|
|
|
|
д.ш |
|
ш |
|
|
|
|
где rд.ш – радиус окружности, делящей поперечное сечение штока
на равные по площади круг и кольцо.
Расчёт магнитного сопротивления ярма-корпуса (3.12)–(3.14) можно заметно упростить, используя для стали корпуса кривую намагничивания стали 3, которая в рабочем диапазоне полностью совпадает с кривой намагничивания стали корпуса. Тогда функция магнитного сопротивления якоря-корпуса примет следующий вид:
56
|
|
2 Hс3 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Q Q |
|
|||||
R |
( ) |
|
|
я |
к |
. |
(3.27) |
|
|
|
|
|
|||||
я.к |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
Для нахождения магнитных сопротивлений цепи необходимо решить систему уравнений Кирхгофа, составленную согласно схеме на рис. 3.4, б:
м ш п; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
п ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
k з; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Rм ( м ) м Rш ( ш ) ш; |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Fm |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
F |
2 R |
( |
) |
|
п |
R |
( |
) |
|
м |
R |
( |
) |
; |
|
|
|
|
||||
|
m |
п |
п |
|
|
м |
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0 |
2 R 2 R k ( k ) k R ( k ) ; |
|
|
|
|
|
||||||||||||||||
2 |
F 2 R ( ) |
2 R ( |
) 2 R |
|
( |
|
|
) |
|
|
, |
|||||||||||
|
|
I |
з |
|
з |
|
|
я.к з |
|
|
з |
|
|
k |
|
k |
|
k |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
где FI – мгновенное значение МДС, наводимое катушкой с током
одного паза.
Фаза МДС взята таким образом, чтобы МДС обеих катушек, входящих в рассматриваемую секцию двигателя рис. 3.2, а), были равны, а создаваемые ими магнитные потоки сонаправлены с магнитным потоком, создаваемым постоянным магнитом. Эта фаза соответствует установившемуся состоянию покоя двигателя, при котором усилие двигателя равно нулю, насыщение магнитной цепи максимально. При этом катушки, не входящие в рассматриваемую секцию, не наводят в ней МДС. Также только при равенстве МДС соседних катушек можно пользоваться допущением о том, что через средний зубец магнитный поток не идёт.
Чтобы решить данную систему с тремя неизвестными , м и численным методом, необходимо одновременно подбирать две неизвестные м и , потому что именно от них зависят сопротивления магнитной цепи. Для расчёта магнитной цепи была написана функция рrog(Fm , FI , Rm , R , R , Rш ) , которая в зависимо-
57

сти от действующего тока I |
посредством дихотомии находит |
и выводит верные значения м |
и . Верхняя граница поиска |
грубо определяется как макс (2 FI Fm ) / (Rm 2 R ) , так как Rm |
|
и R постоянны и представляют большую часть от всего сопро- |
|
тивления магнитной цепи. |
|
Если подставить рабочее значение FI в результат данного
расчёта, можно получить значения магнитных потоков на различных участках магнитной цепи. Для дальнейшего расчёта нам понадобится магнитный поток холостого хода в воздушном зазоре. Результат расчёта prog показывает реальный магнитный поток на участках цепи, а нам нужна только составляющая холостого хода. При этом вести расчёт prog для FI 0 нельзя, так как будет иное
насыщение цепи, а соответственно и величина составляющей холостого хода. Поэтому магнитный поток холостого хода необходимо рассчитывать по формуле, подобной (3.17), только для цепи рис. 3.4, б, принимая насыщение сопротивлений участков цепи равным насыщению, полученному при расчёте prog. Формула (3.17) примет вид
|
|
|
|
|
|
Rоб Rм ( м ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
2R |
2R ( )(R ( ) R ( )) |
|
|
||||||||||||||||||||
|
|
|
|
|
R ( ) |
R ( |
|
|
) |
(R ( ) R ( ) |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
k |
я.к |
з |
|
|
з |
з |
|
|
|
|
|
|
|
|
|
|
R ( |
) |
2R ( |
) |
|
|
|
|
|
|
k |
|
k |
|
я.к |
|
з |
|
з |
|
з |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
ш |
ш |
п п |
|
R ( ) 2R |
2R k ( k )(Rя.к ( з ) Rз ( з )) |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
; |
|||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
R |
( |
k |
) (R |
( |
) R ( |
) |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
я.к |
|
|
з |
з |
|
|
з |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
2R k ( k )(Rя.к ( з ) Rз ( з )) |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
R ( ) |
2R |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
R |
( |
k |
) (R |
( |
) R ( |
) |
|
|||||||||||||||||
|
Rш ( ш ) 2Rп ( п ) |
|
|
|
|
|
|
k |
|
|
я.к |
|
|
з |
з |
|
|
з |
|
|
|
|
||||||||
|
R ( ) 2R |
|
|
2R k ( k )(Rя.к ( з ) Rз ( з )) |
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
R k ( k ) (Rя.к ( з ) Rз ( з ) |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
м0 Fm ;
Rоб
58
п0 |
|
|
|
|
|
|
|
Rш ( ш ) м0 |
|
|
|
|
|
|
; |
||||
Rш ( ш ) 2Rп ( п ) |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
2R k ( k )(Rя.к ( з ) Rз ( з )) |
|
|
|||||||||||
|
|
|
|
R ( ) |
2R |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
R |
( |
k |
) (R |
( |
) R ( |
) |
|||||||||
|
|
|
|
|
|
|
k |
|
|
я.к |
з |
з з |
|
|
|
|
|||
|
|
R ( ) 2R |
|
2R k ( k )(Rя.к ( з ) Rз ( з )) |
|
||||||||||||||
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
R k ( k ) (Rя.к ( з ) Rз ( з ) |
||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||
0 |
|
|
|
|
|
R ( ) п0 |
|
|
|
|
. (3.28) |
||||||||
R ( ) |
2R |
2R k ( k )(Rя.к ( з ) Rз ( з )) |
|
||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
R k |
( k ) Rя.к ( з ) Rз ( з ) |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Таким образом, находится магнитный поток в воздушном зазоре с учётом насыщения.
3.2. Расчёт электрической цепи ЦЛВД
Рассчитав магнитную цепь и узнав максимальный магнитный поток 0 в зазоре, можно рассчитать зависимость ЭДС холостого
хода от частоты питающего напряжения, которая необходима для электрических расчётов двигателя. Для оценочного упрощённого расчёта усилия ЭДС можно представить в виде
E0 ( f ) 4,44 w 0 kоб f 2,834 f В/Гц, |
(3.29) |
где w 2 p wп – общее число витков одной фазы, 0 0,997 мВб. Однако для точного расчёта ЭДС будет иметь вид зависимости E0 (I, f ) и для сокращения времени расчёта её лучше представить
в виде: |
|
|
|
|
E0 (I, f ) f e0 (I ), |
|
(3.30) |
где |
E0 (I ) 4,44 w 0 (30А) kоб f 2,599 f |
В/Гц, |
когда |
0 (30А) 0,914 мВб.
Сравнив значения ЭДС и магнитного потока холостого хода, можно заметить, что существует значительное различие (почти 10 %) между магнитным потоком холостого хода насыщенной
59

и ненасыщенной магнитных систем. Для сравнения, магнитный поток холостого хода в воздушном зазоре, рассчитанный в программе
ANSYS |
Maxwell, учитывающей насыщение цепи, составляет |
0 0,89 |
мВб. При этом E0 2,592 f В/Гц. Из всего этого можно |
сделать вывод, что при расчёте магнитных цепей необходимо учитывать их насыщение.
Приближённо рассчитать усилие двигателя можно по формуле
F p kф Bm A 2 p D2 |
(3.31) |
||
где 2 p – активная |
длина статора; D2 – длина окружности |
||
вторичного элемента; |
A – линейная токовая нагрузка; |
p bн |
– |
|
|
|
|
коэффициент полюсного перекрытия; kф – коэффициент формы поля (приближённо kф 1,11 ); Bm – магнитная индукция в зазоре, определяется как первая гармоника средней магнитной индукции:
B |
Bср |
, |
(3.32) |
m  5
5
здесь Bср определяется через магнитный поток, прошедший через
одну половину одного полюса вторичного элемента, рассматриваемого полюсного деления:
B 0 |
|
2 0 |
. |
(3.33) |
|
|
|||||
ср |
S |
|
D2 |
|
|
|
|
|
|||
Линейная токовая нагрузка A определяется как
A |
I wп |
, |
(3.34) |
|
|||
|
3 |
|
|
где I – действующее значение тока, проходящего через обмотку статора.
Зависимость тока от необходимого усилия с учётом (3.34) имеет вид
60