Лекции_Теория / Механика / Глава М1
.pdfРаздел I. МЕХАНИКА.
Глава 1. Кинематика материальной точки.
1. Введение.
Механика изучает законы механического движения. Механическое движение – изменение взаимного расположения тел с течением времени.
Классическая механика изучает законы механического движения для случаев:
v c

 r
r
v – скорость тела, с = 3·108 м/с – скорость света,
 r
r  - характерные расстояния,
- характерные расстояния,
mvh - длина волны де Бройля,
h= 6,6·10-34 Дж·с – постоянная Планка,
m – масса тела.
Пример: m = 1 кг, v = 1 м/с → λ ~ 10-33 м.
Система единиц СИ: масса – кг, время – с, расстояние – м.
Разделы механики: кинематика, динамика, статика. Кинематика – математическое описание движения тела безотносительно причин его вызывающих.
Динамика – изучает влияние взаимодействия между телами на их механическое движение.
Статика – частный случай динамики, когда тела находятся в покое.
В зависимости от объекта движения различают механику материальной точки, твердого тела, жидкости…
2.Кинематика материальной точки.
Материальная точка – тело размеры и форма которого несущественны в условиях данной задачи.
Система отсчета – тело отсчета, система координат, привязанная к телу отсчета и часы.
Декартова система координат
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|||||||
i , j, k - орты, |
|
i |
|
|
j |
|
|
k |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
Положение материальной точки задается радиусом
вектором r :
|
|
|
|
r (t) x(t)i |
y(t) j |
z(t)k |
|
Движение материальной точки полностью определено, если известны зависимости от времени x(t), y(t), z(t).
Величина (модуль) вектора часто будет обозначаться как r без значка вектора:
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
x 2 y 2 z 2 |
|
|
|
|
|
|
|
||||
r |
|
|
|
|
|
|
|
|||||
Траектория – линия, описываемая в пространстве |
||||||||||||
движущейся материальной точкой. |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
dr |
|
||||
Мгновенная скорость: |
|
v |
|
|
r |
r |
|
|||||
dt |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
- вектор перемещения, |
|||||||
|
|
|
|
dr |
||||||||
|
|
|
|
|
|
|
|
|
|
направлен |
||
|
|
|
|
вектор скорости v |
||||||||
|
|
|
|
по |
|
|
|
|
|
|
||
|
|
|
|
dr то есть по касательной |
||||||||
к траектории.
|
dx |
|
|
dy |
|
|
|
dz |
|
|
|
|
|
|||||||||||
v |
|
|
|
|
i |
|
|
|
|
|
j |
|
|
|
|
k |
vx i |
v y j |
vz k |
|||||
dt |
|
dt |
|
dt |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
|
|
|
|
|
|
2 |
|
v y |
2 |
|
|
|
2 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
v |
|
|
vx |
|
|
|
vz |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
dv |
|
|
|
|
|
|
|
|
|
|||
Ускорение: |
a |
|
|
|
v |
v |
|
|
|
|
||||||||||||||
|
dt |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dv |
x |
|
|
dvy |
|
|
|
dv |
z |
|
a |
|
a |
|
|
a |
|
||||||
a |
|
|
|
i |
|
|
j |
|
|
k |
i |
|
j |
k |
|||||||||||
|
|
|
|
|
|
|
|
|
|
y |
|||||||||||||||
|
|
|
dt |
|
|
dt |
|
|
|
dt |
|
|
x |
|
|
|
z |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
2 |
ay |
2 |
az |
2 |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
a |
|
|
ax |
|
|
|
|
|
|
|
|
|
|
||||||||||||
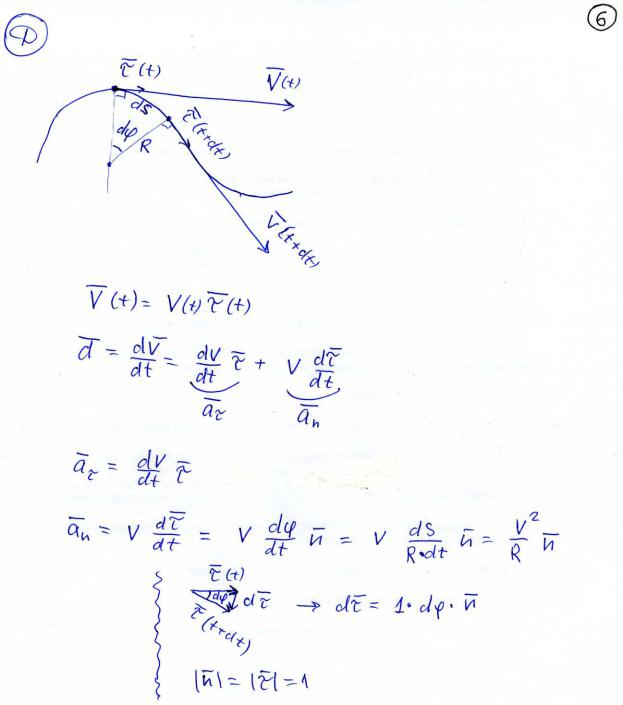
Нормальное и тангенциальное ускорения.
Нормальное ускорение an - проекция полного ускорения на нормаль к траектории.
Тангенциальное ускорение aτ – проекция полного ускорения на касательную к траектории.

|
|
|
|
|
|
|
- единичный вектор, |
|
||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
направленный по касательной к |
|||||||
|
|
|
|
|
траектории в сторону скорости, |
|||||||
|
|
|
|
|
|
- единичный вектор нормали, |
||||||
|
|
|
|
|
n |
|||||||
|
|
|
|
|
направленный перпендикулярно |
|||||||
|
|
|
|
|
касательной под кривизну |
|
||||||
|
|
|
|
|
траектории |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
v2 |
|
|
a |
|
dv |
|
|
|
|
n |
|
|
|
|
|
|
|
|||||
|
|
R |
|
|
|
|
|
dt |
|
(Д1) |
||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R – радиус кривизны траектории
aan n a
a |
|
|
|
|
2 |
2 |
|
2 |
2 |
|
|
||||||||
|
a |
|
an |
a |
ax |
a y |
Путь – сумма длин всех участков траектории.
dS=vdt
t2 |
t2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
S vdt |
vx |
2 v y |
2 |
vz |
2 dt |
||
t1 |
t1 |
|
|
|
|
|
|
Вопросы
1.Область применимости классической механики.
2.Что такое материальная точка.
3.Что такое скорость, величина скорости, путь.
4.Что такое ускорение, нормальное ускорение, тангенциальное ускорение.
5.Что включает в себя система отсчета.
.